
CS Cấp độ 1 - VEXcode VR Python
9 Đơn vị
Tiếp tục hành trình Khoa học máy tính của bạn với mã hóa dựa trên văn bản trong VEXcode VR Python! Sử dụng Robot VR để giải quyết nhiều thách thức lập trình khác nhau, học sinh sẽ tìm hiểu về luồng dự án, vòng lặp, điều kiện và thuật toán trong Python.
Tiếp cận chương trình phát triển chuyên môn liên tục để hỗ trợ bạn khi bạn giảng dạy bằng VEXcode VR. PD kịp thời và có mục tiêu thông qua video, bài học, cuộc trò chuyện cộng đồng, v.v.!

Đơn vị 1
Giới thiệu và Cơ bản
Bài viết này sẽ cho bạn thấy giá trị của VEXcode VR và cách sử dụng dễ dàng. Đơn vị này cũng phác thảo cấu trúc của khóa học, giúp bạn biết trước những gì cần mong đợi và cung cấp cho bạn các công cụ để thành công.

Đơn vị 2
Di chuyển Robot của bạn
Trong Đơn vị này, bạn sẽ giải quyết thử thách Castle Crasher. Bạn sẽ học cách sử dụng Python để khiến Robot VR sử dụng các lệnh Drivetrain để di chuyển xung quanh Sân chơi Castle Crasher. Bạn cũng sẽ học cách sắp xếp các lệnh một cách chính xác để đánh đổ tất cả các lâu đài trên sân chơi.
Đơn vị 3
Hành vi lặp lại
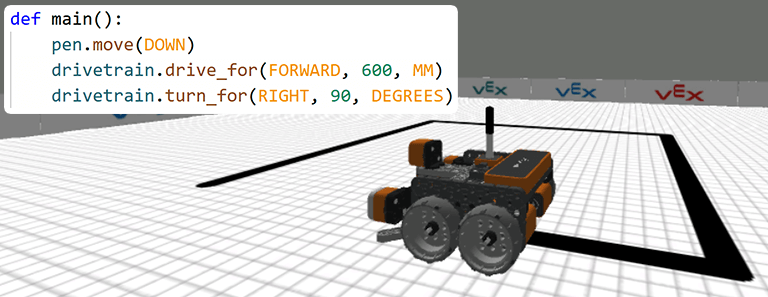
Trong Đơn vị này, bạn sẽ giải quyết Thử thách Vẽ ngôi nhà. Bạn sẽ học cách sử dụng công cụ Pen trên Robot VR để vẽ các hình dạng khác nhau trên Art Canvas Playground. Bạn cũng sẽ học cách sử dụng vòng lặp for trong Python để lặp lại một tập hợp hành vi nhiều lần, chẳng hạn như vẽ các cạnh của hình vuông.
Đơn vị 4
Điều hướng mê cung
Đơn vị này sẽ chỉ cho bạn cách sử dụng đầu vào cảm biến để điều hướng Robot VR bất kể môi trường xung quanh, thay vì "mã hóa cứng" chuyển động chỉ bằng các lệnh Truyền động. Đây là bước đầu tiên quan trọng để có thể xây dựng một thuật toán hiệu quả. Bạn sẽ tham gia Thử thách Mê cung tường bằng Python để điều khiển Robot VR đi qua Sân chơi Mê cung tường từ đầu đến cuối. Bạn sẽ học cách sử dụng Cảm biến cản và vòng lặp while để giải Thử thách mê cung tường.
Đơn vị 5
Phát hiện tường từ xa
Trong Đơn vị này, bạn sẽ điều khiển Robot VR từ đầu đến cuối qua Thử thách Mê cung Tường mà không va vào tường! Bạn sẽ học cách sử dụng Cảm biến khoảng cách trên Robot VR với vòng lặp while và toán tử so sánh để giải quyết thử thách Mê cung tường.
Đơn vị 6
Biết vị trí của bạn
Trong Đơn vị này, bạn sẽ hoàn thành thử thách Lái xe đến Ba số và sử dụng Cảm biến vị trí để điều hướng Robot VR đến ba địa điểm được đánh số khác nhau trên Sân chơi Bản đồ lưới số! Bạn sẽ áp dụng các lệnh từ các danh mục Truyền động, Cảm biến và Điều khiển theo đúng trình tự để giải quyết thử thách Truyền động theo ba con số.
Đơn vị 7
Quyết định với Màu sắc
Trong Đơn vị này, bạn sẽ được giới thiệu về tầm quan trọng của câu lệnh điều kiện. Bạn sẽ khám phá lý do tại sao các câu lệnh có điều kiện, chẳng hạn như câu lệnh if, cần được sử dụng với các vòng lặp vô hạn, chẳng hạn như vòng lặp while vô hạn, để VR Robot hoạt động như mong muốn. Bạn sẽ học cách sử dụng Eye Sensor và các câu lệnh điều kiện để giải Thử thách mê cung đĩa. Trong Thử thách Mê cung đĩa, Robot VR sẽ di chuyển qua Sân chơi Mê cung đĩa từ đầu đến cuối bằng cách sử dụng Cảm biến mắt để phát hiện màu sắc.
Đơn vị 8
Đĩa di chuyển có vòng lặp
Trong Đơn vị này, bạn sẽ tìm hiểu tầm quan trọng của phản hồi cảm biến và vòng lặp lồng nhau. Bạn sẽ học cách sử dụng Nam châm điện trên Robot VR để nhặt và thả đĩa để giải quyết thử thách Di chuyển đĩa. Bạn sẽ áp dụng các kỹ năng đã học ở các Đơn vị trước để tạo một dự án VR VEXcode sử dụng Cảm biến Robot VR và vòng lặp để giải quyết Thử thách Di chuyển đĩa.
Đơn vị 9
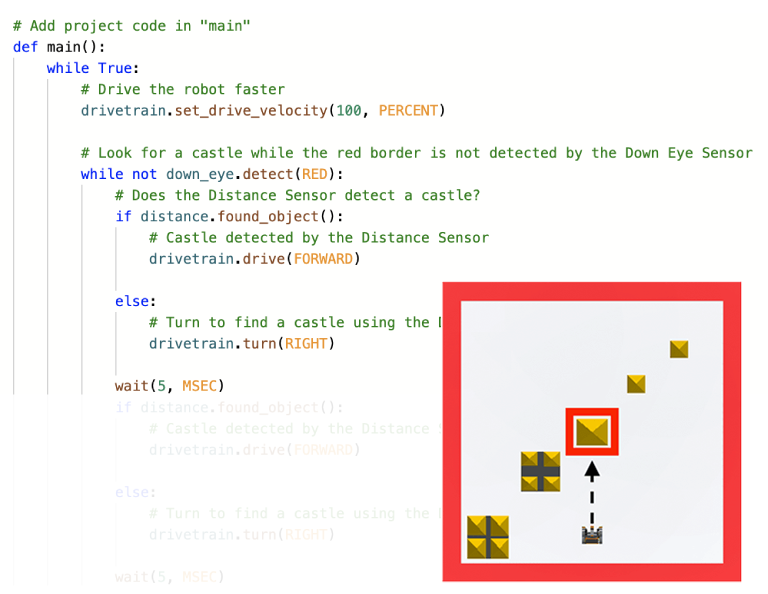
Phát triển thuật toán
Đơn vị này giới thiệu cho bạn về thuật toán. Quay trở lại Đơn vị 2, bạn đã giải quyết Thử thách Castle Crasher trên Sân chơi mà bố cục không thay đổi. Trong Đơn vị này, bạn sẽ phải giải quyết thử thách tương tự, nhưng trên Sân chơi có bố cục thay đổi sau mỗi lần đặt lại. Điều này dẫn đến nhu cầu về một thuật toán sử dụng phản hồi của cảm biến thay vì một chuỗi lệnh đơn giản.