
CS Livello 1 - VEXcode VR Python
9 Unità
Continua il tuo viaggio nell'informatica con la codifica basata su testo in VEXcode VR Python! Utilizzando un robot VR per risolvere varie sfide di codifica, gli studenti impareranno il flusso del progetto, i loop, le condizioni e gli algoritmi in Python.
Accedi allo sviluppo professionale continuo per supportarti mentre insegni con VEXcode VR. PD tempestivo e mirato attraverso video, lezioni, conversazioni della community e altro ancora!

Unità 1
Introduzione e Fondamenti
Questa unità mostra il valore di VEXcode VR e quanto sia facile da usare. Questa unità delinea anche la struttura del corso, dandoti un'anteprima di ciò che c'è da aspettarsi e fornendoti gli strumenti per avere successo.

Unità 2
Spostamento del robot
In questa unità, risolverai la sfida Castle Crasher. Imparerai come usare Python per fare in modo che il robot VR usi i comandi Drivetrain per spostarsi nel parco giochi Castle Crasher. Imparerai anche come mettere in sequenza i comandi correttamente per far cadere tutti i castelli del parco giochi.
Unità 3
Comportamenti ripetuti
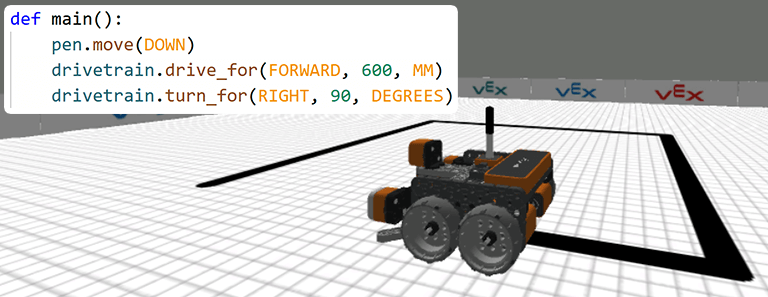
In questa unità, risolverai la sfida Disegna una casa. Imparerai come utilizzare lo strumento Penna su un robot VR per disegnare forme diverse sul Art Canvas Playground. Imparerai anche come utilizzare i loop in Python per ripetere più volte una serie di comportamenti, come disegnare i lati di un quadrato.
Unità 4
Navigare in un labirinto
Questa unità mostrerà come utilizzare l'input del sensore per navigare nel robot VR indipendentemente dall'ambiente circostante, invece del movimento "hard-coding" con soli comandi Drivetrain. Questo è un primo passo importante per essere in grado di costruire un algoritmo efficace. Lavorerai alla Sfida del Labirinto a Muro usando Python per far navigare il Robot VR attraverso il Parco Giochi del Labirinto a Muro dall'inizio alla fine. Imparerai come utilizzare il sensore paraurti e il ciclo while per risolvere la sfida del labirinto a parete.
Unità 5
Rilevamento di muri a distanza
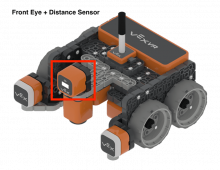
In questa Unità, navigherai nel Robot VR dall'inizio alla fine attraverso la Sfida del Labirinto del Muro senza sbattere contro i muri! Imparerai come utilizzare il sensore di distanza sul robot VR con loop while e operatori di confronto per risolvere la sfida del labirinto a parete.
Unità 6
Conoscere la tua posizione
In questa unità, completerai la sfida Drive to Three Numbers e utilizzerai il sensore di posizione per spostare il robot VR in tre diverse posizioni numerate nel parco giochi della mappa della griglia dei numeri! Si applicheranno i comandi delle categorie Drivetrain, Sensing e Control nella sequenza corretta per risolvere la sfida Drive to Three Numbers.
Unità 7
Decisioni con i colori
In questa Unità, ti verrà presentata l'importanza delle dichiarazioni condizionali. Esplorerai perché le dichiarazioni condizionali, come l'istruzione if, devono essere utilizzate con cicli infiniti, come cicli while infiniti, affinché il robot VR si comporti come previsto. Imparerai come utilizzare il sensore oculare e le dichiarazioni condizionali per risolvere la sfida del labirinto di dischi. Nella Disk Maze Challenge, il robot VR navigherà attraverso il Disk Maze Playground dall'inizio alla fine utilizzando il sensore oculare per rilevare i colori.
Unità 8
Spostamento dei dischi con loop
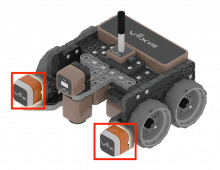
In questa unità, imparerai l'importanza del feedback del sensore e dei cicli di annidamento. Imparerai come utilizzare l'elettromagnete sul robot VR per raccogliere e rilasciare i dischi per risolvere la sfida del Disk Mover. Applicherai le competenze apprese nelle Unità precedenti per creare un progetto VEXcode VR che utilizza sensori e loop di robot VR per risolvere la Disk Mover Challenge.
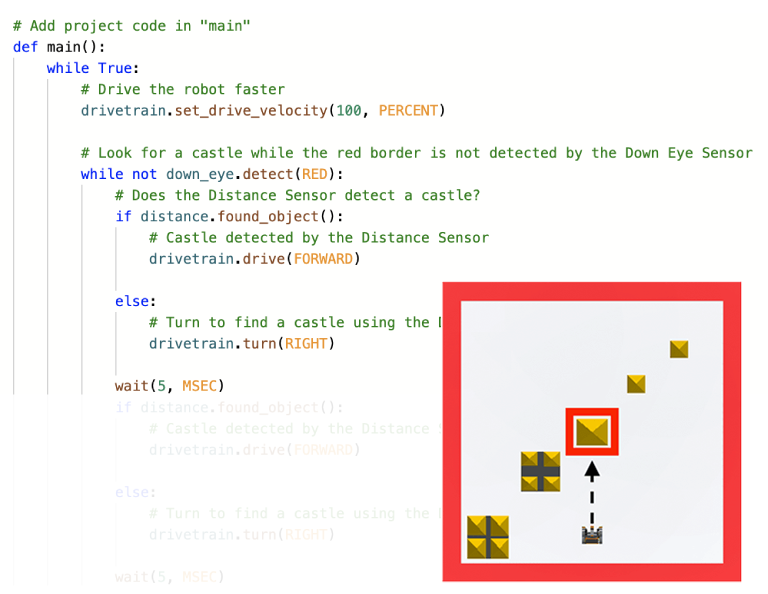
Unità 9
Sviluppo di algoritmi
Questa unità ti introduce agli algoritmi. Tornando all'unità 2, hai risolto la sfida Castle Crasher in un parco giochi in cui il layout non è cambiato. In questa Unità, dovrai risolvere la stessa sfida, ma su un Parco Giochi che cambia il layout ad ogni reset. Ciò introduce la necessità di un algoritmo che utilizzi il feedback del sensore invece di una sequenza di semplici comandi.