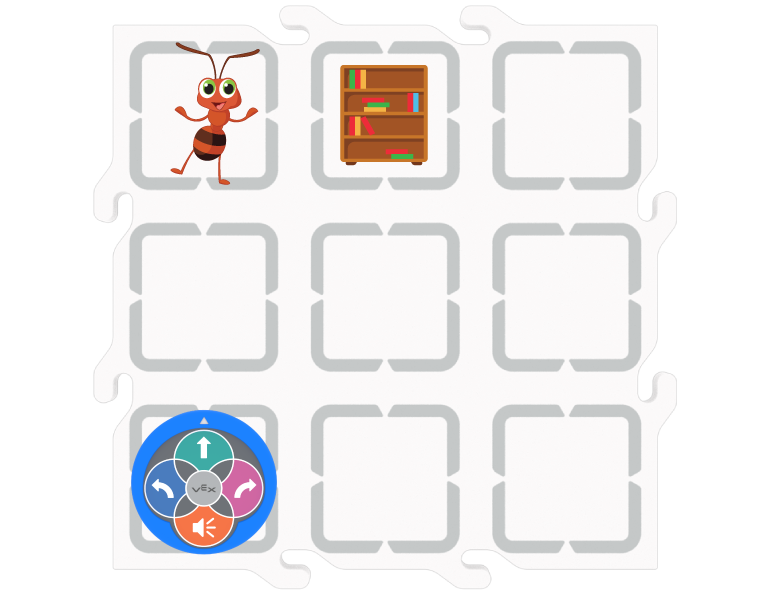
Transforme o seu robô 123 num peixe e codifique-o para nadar!
Activity Link
https://docs.google.com/document/d/1Muo4YUK2qbUX6JrSszG_a7CxBarItAW8D2IDWzxKrjk/edit#
Activity Image
Imagem
VEX Platform
Subject
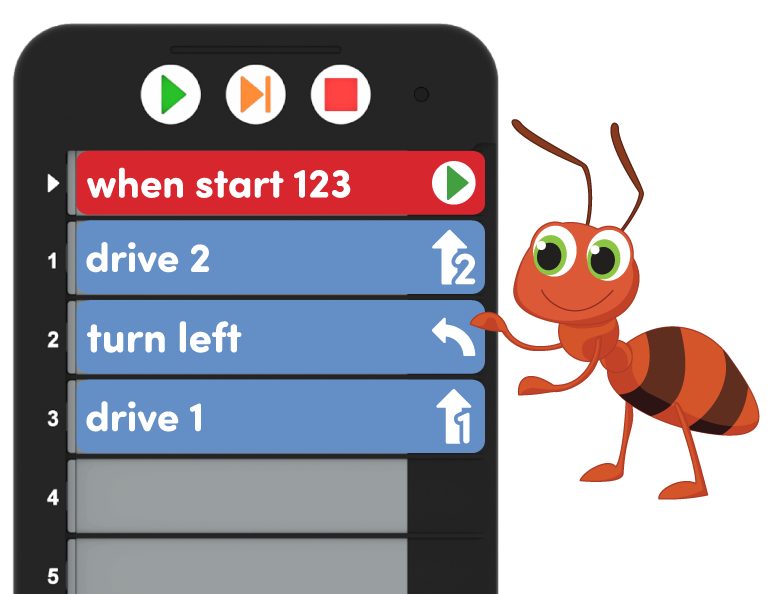
Coding Method
Activity PDF Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/123/Activities/VEX 123 Activity - Fishbowl.pdf
Activity Docx Link
https://content.vexrobotics.com/assets/education/stem-labs/docs/123/Activities/VEX 123 Activity - Fishbowl.docx