
CS ระดับ 1 - บล็อก VEXcode VR
9 หน่วย
เริ่มต้นการเดินทางสู่การเรียนรู้วิทยาการคอมพิวเตอร์ด้วยหลักสูตร VEXcode VR Computer Science Level 1 - Blocks! การใช้ VEXcode VR และกิจกรรมที่ใช้หุ่นยนต์มีส่วนร่วม นักเรียนจะได้เรียนรู้เกี่ยวกับโฟลว์ของโปรเจ็กต์ ลูป เงื่อนไข และอัลกอริทึม
เข้าถึงการพัฒนาทางวิชาชีพอย่างต่อเนื่องเพื่อสนับสนุนคุณในขณะที่คุณสอนด้วย VEXcode VR PD ตรงเวลาและตรงเป้าหมายผ่านวิดีโอ บทเรียน การสนทนาในชุมชน และอื่นๆ อีกมากมาย!
บทที่ 1
บทนำและพื้นฐาน
หน่วยนี้แสดงให้คุณเห็นถึงคุณค่าของ VEXcode VR และความง่ายในการใช้งาน หน่วยนี้ยังสรุปโครงสร้างสำหรับหลักสูตรให้คุณดูตัวอย่างสิ่งที่คาดหวังและให้เครื่องมือที่จะประสบความสำเร็จ

หน่วยที่ 2
การเคลื่อนย้ายหุ่นยนต์ของคุณ
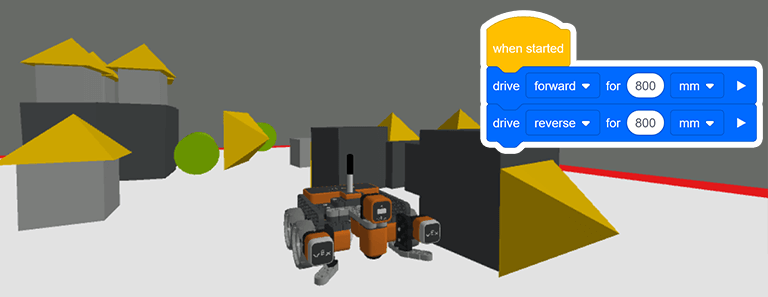
ในยูนิตนี้คุณจะได้แก้ปัญหา Castle Crasher คุณจะได้เรียนรู้วิธีใช้ VEXcode VR เพื่อทำให้หุ่นยนต์ VR ใช้คำสั่ง Drivetrain เพื่อเคลื่อนที่ไปรอบๆสนามเด็กเล่น Castle Crasher นอกจากนี้คุณยังจะได้เรียนรู้วิธีการเรียงลำดับคำสั่งอย่างถูกต้องเพื่อล้มปราสาททั้งหมดในสนามเด็กเล่น

หน่วยที่ 3
พฤติกรรมการทำซ้ำ
ในยูนิตนี้คุณจะต้องแก้โจทย์ Draw a House คุณจะได้เรียนรู้วิธีใช้เครื่องมือปากกาบนหุ่นยนต์ VR เพื่อวาดรูปทรงต่างๆบนสนามเด็กเล่น Art Canvas นอกจากนี้คุณยังจะได้เรียนรู้วิธีใช้ลูปใน VEXcode VR เพื่อทำซ้ำชุดพฤติกรรมหลายครั้งเช่นการวาดด้านข้างของสี่เหลี่ยมจัตุรัส
หน่วยที่ 4
การนำทางเขาวงกต
หน่วยนี้จะแสดงวิธีใช้อินพุตเซ็นเซอร์เพื่อนำทางหุ่นยนต์ VR โดยไม่คำนึงถึงสภาพแวดล้อมแทนที่จะเป็นการเคลื่อนไหวแบบ "ฮาร์ดโค้ด" ด้วยคำสั่ง Drivetrain เท่านั้น นี่เป็นขั้นตอนแรกที่สำคัญในการสร้างอัลกอริทึมที่มีประสิทธิภาพ คุณจะทำงานบน Wall Maze Challenge โดยใช้ VEXcode VR เพื่อนำทางหุ่นยนต์ VR ผ่าน Wall Maze Playground ตั้งแต่ต้นจนจบ คุณจะได้เรียนรู้วิธีใช้เซ็นเซอร์กันชนและบล็อก [รอจนกว่าจะถึง] เพื่อแก้ปัญหา Wall Maze Challenge
หน่วยที่ 5
การตรวจจับกำแพงจากระยะไกล
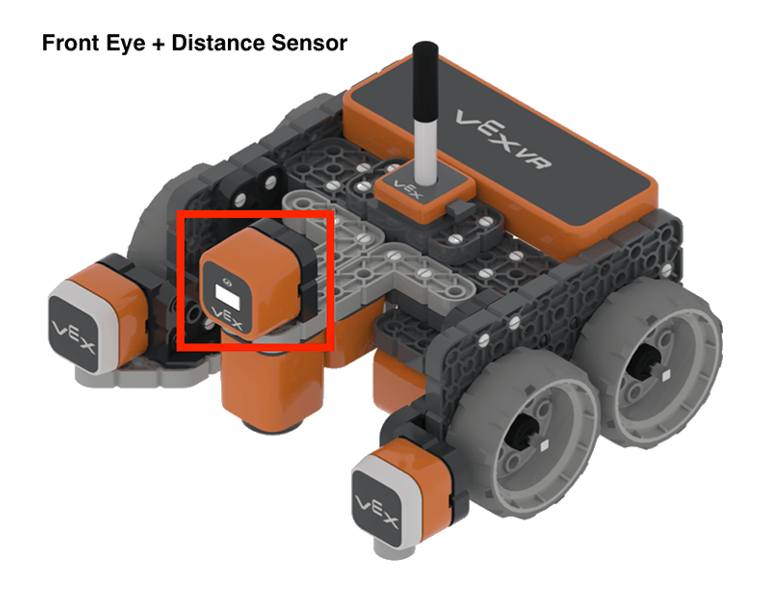
ในยูนิตนี้คุณจะนำทางหุ่นยนต์ VR ตั้งแต่ต้นจนจบผ่านการท้าทาย Wall Maze โดยไม่ชนกับกำแพง! คุณจะได้เรียนรู้วิธีใช้เซ็นเซอร์ระยะทางบนหุ่นยนต์ VR พร้อมบล็อกเปรียบเทียบเพื่อแก้ปัญหาเขาวงกตติดผนัง
หน่วยที่ 6
การรู้ตำแหน่งของคุณ
ในหน่วยนี้คุณจะเสร็จสิ้นการท้าทาย Drive to Three Numbers และใช้เซ็นเซอร์ตำแหน่งเพื่อนำทางหุ่นยนต์ VR ไปยังสามตำแหน่งที่มีหมายเลขแตกต่างกันบน Number Grid Map Playground! คุณจะใช้บล็อกจากหมวดหมู่ Drivetrain, Sensing และ Control ตามลำดับที่ถูกต้องเพื่อแก้ปัญหา Drive to Three Numbers
บทที่ 7
การตัดสินใจด้วยสี
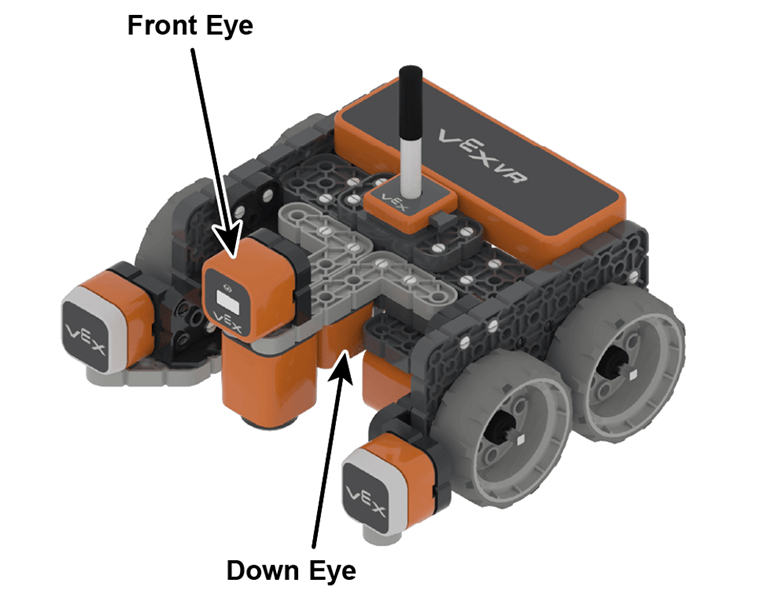
ในหน่วยนี้คุณจะได้รับการแนะนำให้รู้จักกับความสำคัญของข้อความที่มีเงื่อนไข คุณจะได้สำรวจว่าเหตุใดจึงต้องใช้คำสั่งแบบมีเงื่อนไขเช่นบล็อค [If then] กับลูปเช่นบล็อค [Forever] เพื่อให้หุ่นยนต์ VR ทำงานตามที่ตั้งใจไว้ คุณจะได้เรียนรู้วิธีใช้เซ็นเซอร์ตรวจจับดวงตาและข้อความแบบมีเงื่อนไขเพื่อแก้ปัญหา Disk Maze Challenge ใน Disk Maze Challenge หุ่นยนต์ VR จะนำทางผ่าน Disk Maze Playground ตั้งแต่ต้นจนจบโดยใช้เซ็นเซอร์ตรวจจับดวงตาเพื่อตรวจจับสี

บทที่ 8
การย้ายดิสก์ที่มีลูป
ในหน่วยนี้คุณจะได้เรียนรู้ถึงความสำคัญของการป้อนกลับของเซ็นเซอร์และการซ้อนลูป คุณจะได้เรียนรู้วิธีใช้แม่เหล็กไฟฟ้าบนหุ่นยนต์ VR เพื่อรับและวางดิสก์เพื่อแก้ปัญหาการย้ายดิสก์ คุณจะใช้ทักษะที่ได้เรียนรู้ในหน่วยก่อนหน้านี้เพื่อสร้างโครงการ VEXcode VR ที่ใช้เซ็นเซอร์ VR Robot และลูปเพื่อแก้ปัญหา Disk Mover Challenge
บทที่ 9
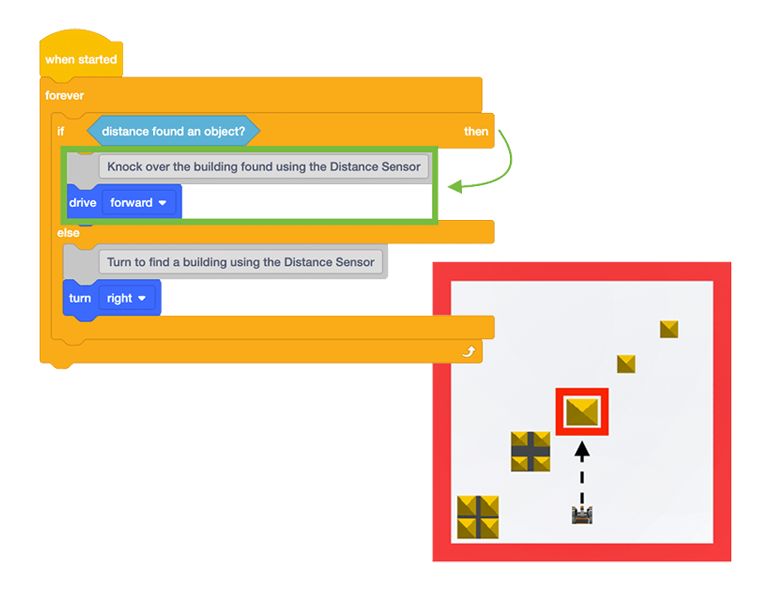
การพัฒนาอัลกอริทึม
ยูนิตนี้จะแนะนำคุณเกี่ยวกับอัลกอริทึม กลับไปที่หน่วย 2 คุณได้แก้ปัญหา Castle Crasher Challenge บนสนามเด็กเล่นที่เค้าโครงไม่เปลี่ยนแปลง ในยูนิตนี้คุณจะต้องแก้ปัญหาเดียวกันแต่บนสนามเด็กเล่นที่เปลี่ยนเค้าโครงด้วยการรีเซ็ตแต่ละครั้ง ซึ่งจะแนะนำความจำเป็นในการใช้อัลกอริทึมที่ใช้ข้อเสนอแนะของเซ็นเซอร์แทนลำดับของคำสั่งง่ายๆ