
ขึ้นและเหนือ
6 บทเรียน
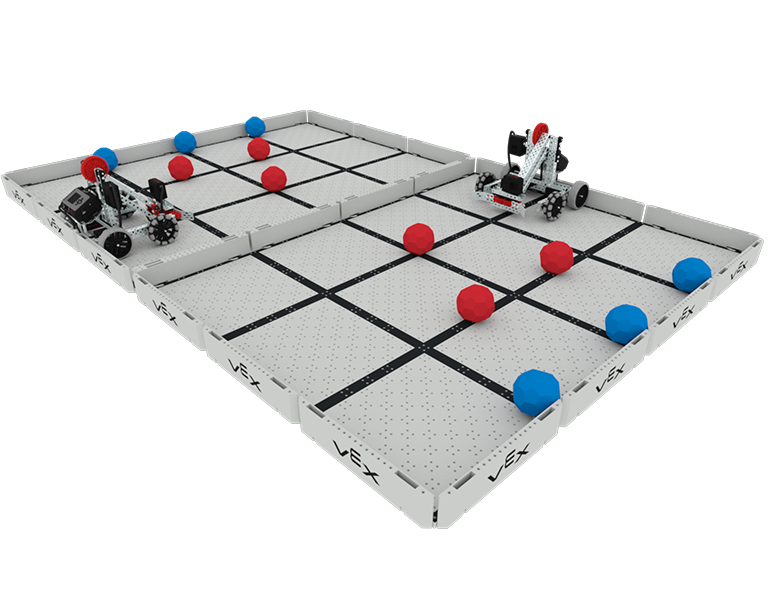
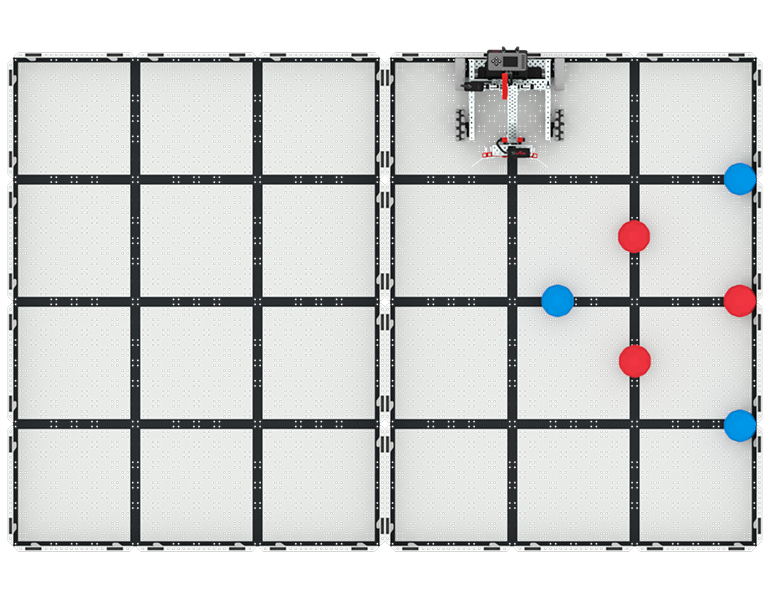
ในบทนี้ คุณจะได้สำรวจวิธีการออกแบบ Clawbot เพื่อรวบรวม หยิบ และย้าย Buckyballs จากด้านหนึ่งของสนามไปยังอีกด้านหนึ่ง ในการแข่งขัน Up and Over!
เยี่ยมชมพอร์ทัลของครูเพื่อดูสื่อและวิดีโอสนับสนุนครูเกี่ยวกับเนื้อหาและการอำนวยความสะดวกของบทเรียน Up and Over
บทที่ 1: บทนำ
ในบทเรียนนี้คุณจะได้รับการแนะนำให้รู้จักกับการแข่งขัน Up and Over ตั้งค่าแบตเตอรี่และคอนโทรลเลอร์เตรียมพร้อมที่จะเขียนโค้ดและสร้าง Clawbot
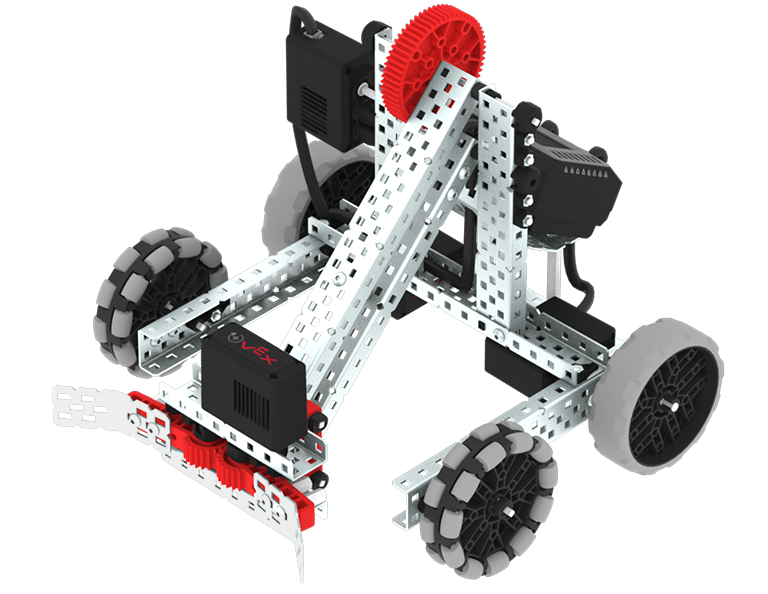
บทที่ 2: การออกแบบกรงเล็บ
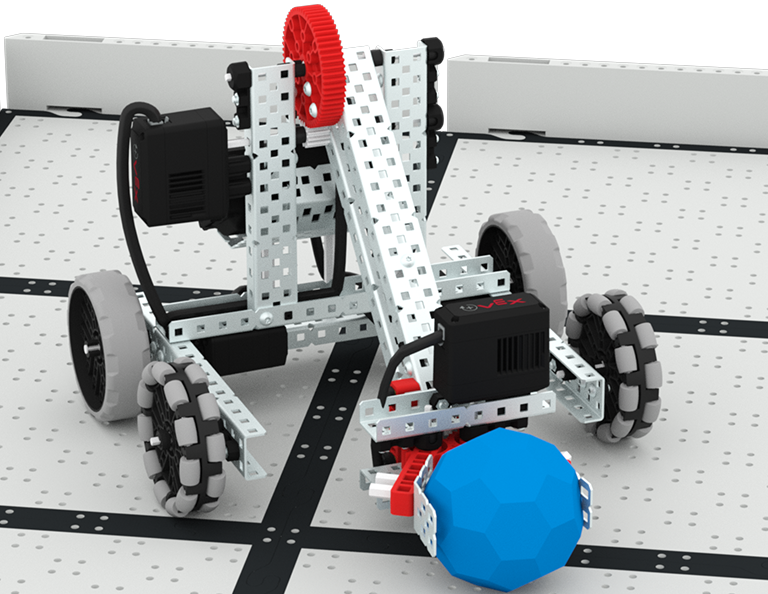
ในบทเรียนนี้คุณจะได้เรียนรู้ว่ากรงเล็บคืออะไรกรงเล็บที่มีประสิทธิภาพทำงานอย่างไรและการสอดแนมจะเป็นประโยชน์ต่อการออกแบบและกลยุทธ์ของทีมของคุณอย่างไร จากนั้นคุณจะนำสิ่งที่คุณได้เรียนรู้ไปใช้ในการท้าทาย Grab and Go
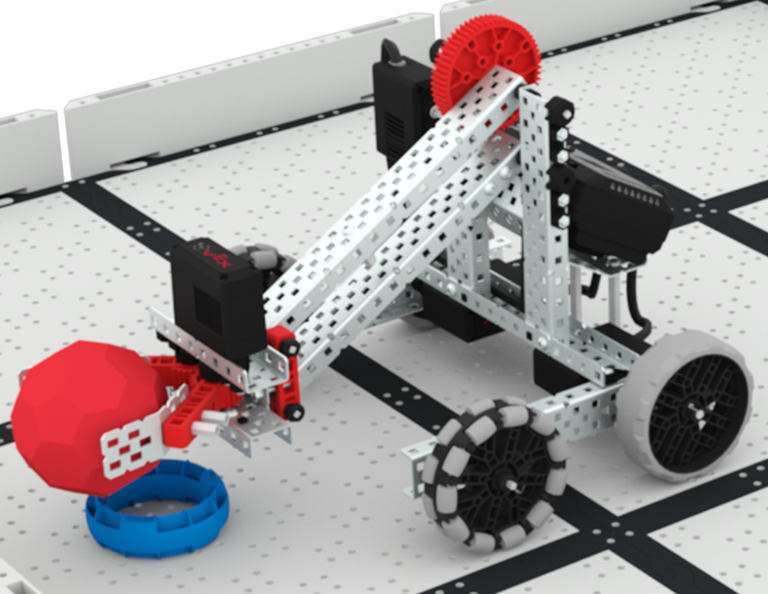
บทที่ 3: การออกแบบแขน
ในบทเรียนนี้ท่านจะได้เรียนรู้เกี่ยวกับองค์ประกอบต่างๆของแขนหุ่นยนต์รวมถึงวิธีการทำงานและสิ่งที่ทำให้การออกแบบแขนมีประสิทธิภาพ จากนั้นคุณจะออกแบบและสร้างแขนให้หุ่นยนต์ของคุณซ้อนบัคกี้บอลในวงแหวนสำหรับการท้าทายแบบซ้อนกัน
บทเรียนที่ 4: กลุ่มมอเตอร์
ในบทเรียนนี้คุณจะได้เรียนรู้ว่ากลุ่มมอเตอร์คืออะไรมีประโยชน์อย่างไรและวิธีการกำหนดค่ากลุ่มมอเตอร์ใน VEXcode EXP เพื่อทำซ้ำบนหุ่นยนต์ของคุณเพื่อทำการท้าทาย Up and Over ให้เสร็จสมบูรณ์
บทที่ 5: การแข่งขันที่สูงขึ้นเรื่อยๆ
ในบทเรียนนี้คุณจะใช้การเรียนรู้ของคุณจากบทเรียนก่อนหน้านี้เพื่อแข่งขันในการแข่งขันขึ้นและลง!

บทที่ 6: บทสรุป
ในบทเรียนนี้คุณจะได้ทบทวนหน่วยและระบุความเชื่อมโยงระหว่างสิ่งที่คุณทำกับอาชีพ STEM