
Programlama Sürüşü İleri ve Geri - Python
![]() Öğretmen Araç Kutusu
-
Etkinlik Taslağı
Öğretmen Araç Kutusu
-
Etkinlik Taslağı
Bu keşif, öğrencilere temel ileri sürüş, geri sürüş ve bekleme programlama davranışlarını tanıtacaktır. Bu temel beceriler, STEM Laboratuvarı'nın sonunda Speedbot'u kullanarak bir hastane katında dolaşacakları Automed Challenge'da başarılı olmalarına yardımcı olacaktır.
V5 Speedbot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablon projesini kullanarak öğrenciler, Speedbot'u sadece bir komut kullanarak ileri hareket edecek şekilde programlayabilirler.
Speedbot harekete hazır!
Bu keşif, Speedbot'unu basit hareketler için programlayabilmen için sana araçlar verecektir. Bu aktivitenin sonunda, ileri, geri ve bekleme davranışlarını kullanarak Basketbol Tatbikatları Mücadelesine katılacaksınız.
![]() Öğretmen Araç Kutusu
Öğretmen Araç Kutusu
İşte VEXcode V5 Kullanıcı Arayüzünün genel bir görünümü. Öğrencilere bu sekmeler/butonlar Medbot STEM Laboratuvarındaki aktiviteler sırasında tanıtılacaktır. Bu sekmeler/butonlar hakkında daha fazla bilgi sağlamak için STEM Lab genelinde bağlantılar da sağlanmıştır.

- Bu keşifte kullanılacak VEXcode V5 talimatları:
- drivetrain.drive_for(FORWARD, 200, MM)
- bekle(1, saniye)
-
Talimat hakkında daha fazla bilgi edinmek için Yardım'ı seçin ve ardından daha fazla bilgi görmek için bir komutun yanındaki soru işareti simgesini seçin.

- Gerekli donanıma, mühendislik dizüstü bilgisayarınıza ve VEXcode V5 'e sahip olduğunuzdan emin olun.
![]() Öğretmen İpuçları
Öğretmen İpuçları
Eğer öğrenci VEXcode V5'i ilk kez kullanıyorsa, keşif sırasında istediği zaman Eğitimlere başvurabilir. Eğitimler Araç Çubuğunda yer almaktadır. 
| Adet | Gerekli Malzemeler |
|---|---|
| 1 |
Speedbot Robot |
| 1 |
Şarjlı Robot Pili |
| 1 |
VEXcode V5 |
| 1 |
USB Kablosu (bilgisayar kullanıyorsanız) |
| 1 |
Mühendislik Defteri |
![]() Öğretmen İpuçları
Öğretmen İpuçları
Öğrenciler için sorun giderme adımlarının her birini modelleyin.
Adım 1: Keşfe Hazırlık
Etkinliğe başlamadan önce, bu öğelerin her birini hazır bulunduruyor musunuz? Aşağıdakilerin her birini kontrol edin:
- Motorlar doğrumı takılı?
- Akıllı kablolartam olaraktüm motorlara mı takılmış?
- Beyinmi açılıyor?
- Pilşarjlı mımi?
Adım 2: Yeni Bir Proje Başlatın
Projeye başlamak için aşağıdaki adımları tamamlayın:
-
Dosya menüsünü açın ve Örnekleri Aç'ı seçin.

-
Speedbot (Drivetrain 2 - motor, No Gyro) şablon projesini seçin ve açın. Şablon proje Speedbot'unmotor konfigürasyonunuiçerir. Şablon kullanılmazsa, robotunuz projeyi doğru şekilde çalıştırmayacaktır.

- Speedbot'u ileri ve geri hareket ettirmek üzerinde çalışacağınız için projenizeDriveadını vereceksiniz. Proje Adına tıklayın, Sürücü yazın ve Kaydet'i seçin.

![]() Öğretmen İpuçları
Öğretmen İpuçları
-
Proje Adları kelimeler arasında veya kelimelerden sonra boşluk içerebilir.

- Öğrencilerden proje ismine kendi adlarının baş harflerini veya gruplarının adını eklemelerini isteyebilirsiniz. Öğrencilerden projelerini sunmalarını istemeniz, projelerin farklılaştırılmasına yardımcı olacaktır.
- Bu, öğrencilerinizin programlama ile ilgili deneyebilecekleri ilk etkinlik olduğundan, adımları modellemeli ve ardından öğrencilerden aynı eylemleri tamamlamalarını istemelisiniz. Öğretmen daha sonra öğrencilerin adımları doğru bir şekilde takip ettiğinden emin olmak için onları izlemelidir.
- Öğrencilerin Dosya menüsünden Örnekleri Aç seçeneğini seçtiğinden emin olun.
- Öğrencilerin Speedbot (Aktarma Organları 2 Motorlu, Jiroskop Yok) şablon projesini seçtiğinden emin olun.
- Öğrencilere Örnekler sayfasında seçebilecekleri birkaç seçenek olduğunu belirtebilirsiniz. Başka robotlar inşa edip kullandıkça farklı şablonları kullanma şansına sahip olacaklar.
- Araç Çubuğunun ortasındaki pencerede artıkDriveprojesi adının olduğundan emin olun.

![]() Öğretmen Araç Kutusu
-
Projeleri Kaydetme
Öğretmen Araç Kutusu
-
Projeleri Kaydetme
-
VEXcode V5'i ilk açtıklarında pencerenin VEXcode Projesi olarak etiketlendiğini belirtin. VEXcode V5 ilk açıldığında varsayılan proje adı VEXcode Projesi'dir. Proje Drive olarak yeniden adlandırılıp kaydedildikten sonra, ekran yeni proje adını gösterecek şekilde güncellendi. Araç çubuğundaki bu pencereyi kullanarak öğrencilerin doğru projeyi kullanıp kullanmadıklarını kontrol etmek kolaydır.
-
Öğrencilere artık ilk projelerine başlamaya hazır olduklarını söyleyin. Öğrencilere, sadece birkaç basit adımı izleyerek Speedbot'u ileriye taşıyacak bir proje oluşturabileceklerini ve çalıştırabileceklerini açıklayın.
-
Öğrencilere projelerini çalışırken kaydetmelerini hatırlatın. VEX Kütüphanesi'ndeki Python bölümü VEXcode V5'teki kaydetme uygulamalarını açıklıyor.
![]() Öğretmen Araç Kutusu
-
Durun ve Tartışın
Öğretmen Araç Kutusu
-
Durun ve Tartışın
Bu, öğrencilerin VEXcode V5'te yeni bir projeye bireysel olarak veya gruplar halinde başlarken tamamladıkları adımları gözden geçirmeleri için iyi bir noktadır. Öğrencilerden, grup içinde veya tüm sınıfla paylaşmadan önce bireysel olarak düşünmelerini isteyin.
Adım 3: İleriye Doğru İlerleyin
Artık robotu ileri sürmek için programlamaya başlamaya hazırsınız!
-
Programlamaya başlamadan önce, bir talimatın ne olduğunu anlamamız gerekir. Bir talimatın üç bölümü vardır. VEXcode V5 Python'da kodun renklendirilmesi hakkında daha fazla bilgi için makaleye bakın

-
Yönergeyi projeye ekleyin, böylece projeniz şu şekilde görünür:
# Vex import'tan kütüphane import'ları * # Proje kodu drivetrain.drive_for'u başlatın (FORWARD, 100, MM)
![]() Öğretmen İpuçları
Öğretmen İpuçları
Talimatı yazmaya başladığınızda otomatik tamamlama fonksiyonunu fark edebilirsiniz. İstediğiniz ismi seçmek için “Yukarı” ve “Aşağı” tuşlarını kullanın, ardından seçimi yapmak için klavyenizdeki “Tab” veya (Enter/Return) tuşuna basın. Bu özellik hakkında daha fazla bilgi için Python makalesine göz atın.

-
Robot Beynindeki mevcut sekiz yuvadan birini seçmek için Yuva simgesini seçin ve Yuva 1 'i seçin.

-
Mikro USB kablosu kullanarak V5 Robot Beyin'i bilgisayara bağlayın ve V5 Robot Beyin'i açın. Araç çubuğundaki Beyin simgesibaşarılı bir bağlantı kurulduğunda yeşil renge döner.

-
Projeyi Beyne indirmek içinİndirseçin.

![]() Öğretmen Araç Kutusu
Öğretmen Araç Kutusu
- Öğrencilere Robot Beyninden USB kablosunu çıkarmalarını hatırlatın. Bir projeyi çalıştırırken robotun bilgisayara bağlı olması, robotun bağlantı kablosunu çekmesine neden olabilir.
![]() Öğretmen Araç Kutusu
-
Durun ve Tartışın
Öğretmen Araç Kutusu
-
Durun ve Tartışın
Öğrencilerden bu projenin Speedbot'a indirilip çalıştırıldığında ne olacağını tahmin etmelerini isteyin. Öğrencilere tahminlerini mühendislik defterlerine kaydetmelerini söyleyin. Eğer zamanınız varsa, her gruptan tahminlerini paylaşmalarını isteyin.
-
Projenizin indirildiğinden emin olmak için Robot Brain'in ekranına bakın (Python). Proje adı Sürücü, Yuva 1 'de listelenmelidir.

![]() Öğretmen Araç Kutusu
-
Model İlk
Öğretmen Araç Kutusu
-
Model İlk
- Tüm öğrencilerin aynı anda denemesini sağlamadan önce projeyi sınıfın önünde modellemek. Öğrencileri bir alanda toplayın ve Speedbot yere konulduğunda hareket edebilmesi için yeterli alan bırakın.
- Öğrencilere projelerini yürütme sırasının artık onlarda olduğunu söyleyin. Onlara açık bir yol olduğundan ve hiçbir Speedbot'un birbirine çarpmayacağından emin olun.
-
Projenin seçili olduğundan emin olduktan sonra Robot Beyni üzerindekiÇalıştırbutonuna basarak projeyi robot üzerinde çalıştırın (Python). İlk projenizi oluşturduğunuz için tebrikler!

Adım 4: Geri Sürüş
Artık robotunuzu ileri gidecek şekilde programladığınıza göre, şimdi geri geri gidecek şekilde programlayalım.
-
Sürücü talimatındaki parametreyi İLERİ, yerine GERİolarak değiştirin, böylece projeniz şu şekilde görünecektir:
# Vex import'tan kütüphane import'ları * # Proje kodu drivetrain.drive_for'u başlatın (REVERSE, 100, MM) -
Drive'dan Reverse'e değiştirmek için Proje Adını seçin .

-
Yeni bir yuva seçmek için yuva simgesini seç. Yuva 2 'yi seçin.

-
Projeyi indirin (Python).

-
Projenizin indirildiğinden emin olmak için Robot Brain'in ekranına bakın (Python). Proje adı Reverse, Slot 2 'de listelenmelidir.

-
Projenin seçili olduğundan emin olduktan sonra Robot Beyni üzerindekiÇalıştırbutonuna basarak projeyi robot üzerinde çalıştırın (Python).

![]() Öğretmen Araç Kutusu
-
4. Adımı Tamamlama
Öğretmen Araç Kutusu
-
4. Adımı Tamamlama
-
drive_forkomutunuforwardreversedeğiştirmek için ilk parametreyi REVERSE olarak değiştirmeniz yeterlidir. Bu, aktarma organlarındaki motorların ters yönde hareket etmesini sağlayacaktır.
-
mm sayısı değiştirilebilir, ancak bu örnekte bir önceki adımda ayarladığımız gibi mm'yi 100 mm'de bırakacağız.
-
Projeyi çalıştırmadan önce Robot Beyni'nden USB kablosunu çıkarmaları gerektiğini hatırlatın.
-
Öğrencilere projelerini çalışırken kaydetmelerini hatırlatın. VEX Kütüphanesi'ndeki Pythonbölümü VEXcode V5'teki kaydetme uygulamalarını açıklıyor.
Adım 5: Bekleyin ve ardından Geri Viteste Sürün
Artık robotu ileri ve sonra geri gidecek şekilde programladığımıza göre, artık robotun geri geri gitmeden önce belirli bir süre beklemesi için bir bekleme talimatı ekleyebiliriz.
- DRIVE_FOR komutundan önce bir bekleme talimatı ekleyin. Beklemenin drive_for komutuyla eşleşecek şekilde girintili olduğundan ve tüm komutların "Proje kodunu başlat" yorumunun altında olduğundan emin olun. Bu, robota geri geri gitmeden önce üç saniye beklemesini söyler.
-
wait(3, SECONDS) drivetrain.drive_for(GERİ, 100, MM) -
Reverse'den WaitReverse'e değiştirmek için Proje Adını seçin.

-
Yeni bir yuva seçmek için yuva simgesini seç. Yuva 3 'ü seçin.

-
Projeyi indirin (Python).

-
Projenizin indirildiğinden emin olmak için Robot Brain'in ekranına bakın (Python). WaitReverse proje adı Slot 3 'te listelenmelidir.

-
Projenin seçili olduğundan emin olduktan sonra robot üzerinde projeyi çalıştırın (Python) ve ardındanÇalıştırbutonuna basın.

![]() Öğretmen Araç Kutusu
-
5. Adımı Tamamlama
Öğretmen Araç Kutusu
-
5. Adımı Tamamlama
- wait komutunu kullanmak projeyi sonlandırmaz, sadece robotik hareketi duraklatır.
- Eğer öğrenciler bilgisayar kullanıyorsa, projeyi çalıştırmadan önce Robot Beyni'nden USB kablosunu çıkarmaları gerektiğini hatırlatın.
- Öğrencilere projelerini çalışırken kaydetmelerini hatırlatın. VEX Kütüphanesi'ndeki Python bölümü VEXcode V5'teki kaydetme uygulamalarını açıklıyor.
Adım 6: Basketbol Antrenmanları Mücadelesini Tamamlayın!
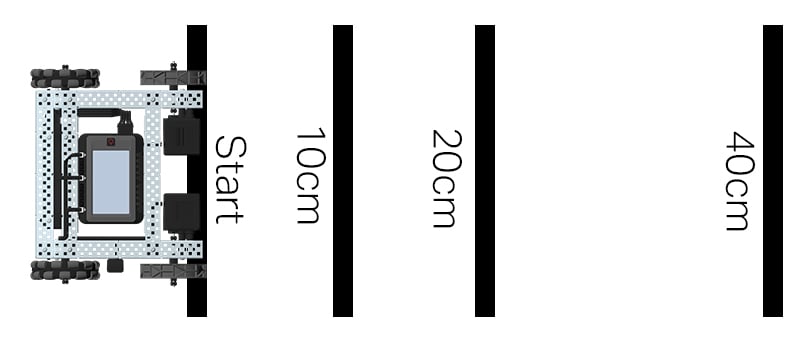
Basketbol Tatbikatları Meydan Okuma düzeni
Basketbol Tatbikatları Mücadelesinde, robot farklı mesafelerde bir dizi çizgide gezinebilmelidir. Robot, başlangıç konumundan 10 cm uzaklıktaki ilk çizgiye doğru ilerleyecek, 1 saniye bekleyecek ve ardından aynı çizgiye geri dönecektir. Robot daha sonra ikinci çizgiye 20 cm ileri giderek hareketi tekrarlayacak, 1 saniye bekleyecek ve ardından orijinal başlangıç çizgisine geri dönecektir. Robot, 40 cm'lik bir mesafeyle üçüncü çizgiye doğru ilerleyecek, 1 saniye bekleyecek ve ardından mücadeleyi tamamlamak için başlangıç çizgisine geri dönecektir.
Robotu programlamadan önce, robotun yolunu ve davranışlarını mühendislik not defterinize planlayın.
Basketbol Mücadelesini tamamladıktan sonra, daha da ileri düzey mücadeleleri tamamlamak için ileri ve geri hareketleri ek robot davranışlarıyla birleştirebileceksiniz.
Programlarken 1 cm = 10 mm olduğunu unutmayın.
![]() Öğretmen Araç Kutusu
-
Çözümü
Öğretmen Araç Kutusu
-
Çözümü
Aşağıda örnek bir çözüm görebilirsiniz:
# Kütüphane
vex'ten içe aktar *
# Proje kodunu başlat
# 10 cm ileri sür
drivetrain.drive_for(FORWARD, 100, MM)
# 1 saniye bekle
wait(1, SECONDS)
# Başlangıç çizgisine geri sür
drivetrain.drive_for(REVERSE, 100, MM)
# 20 cm ileri sür
drivetrain.drive_for(FORWARD, 200, MM)
# 1 saniye bekle
wait(1, SECONDS)
# Başlangıç çizgisine geri sür
drivetrain.drive_for(REVERSE, 200, MM)
# 40 cm ileri sür
drivetrain.drive_for(FORWARD, 400, MM)
# 1 saniye bekle
wait(1, SECONDS)
# Başlangıç çizgisine geri sür
aktarma organları.drive_for(GERİ, 400, MM)
![]() Öğretmen Araç Kutusu
-
Durun ve Tartışın
Öğretmen Araç Kutusu
-
Durun ve Tartışın
Öğrencilerden çözümlerini tüm sınıfça tartışmadan önce ikili gruplar halinde paylaşmalarını isteyin. Tartışmayı kolaylaştırmak için şu soruları sorun:
- Bu yarışmayı programlarken herhangi bir zorlukla karşılaştınız mı?
- Robotunuz projenize göre beklediğiniz gibi davrandı mı? Neden veya neden olmasın?
- Eğer meydan okumayı tekrar yapma şansın olsaydı, farklı olarak yapacağın bir şey var mıydı?