
![]() Zestaw narzędzi dla nauczyciela
-
Zarys ćwiczeń
Zestaw narzędzi dla nauczyciela
-
Zarys ćwiczeń
Podczas tej eksploracji uczestnicy kursu zapoznają się z podstawowymi zachowaniami programistycznymi typu „jedź do przodu”, „do tyłu” i „czekaj”. Te podstawowe umiejętności pomogą im odnieść sukces w wyzwaniu Automed na koniec tego laboratorium STEM, kiedy będą poruszać się po piętrze szpitala za pomocą Speedbota.
Korzystanie z projektu szablonowego V5 Speedbot (2-silnikowy układ napędowy, bez żyroskopu) umożliwia uczniom zaprogramowanie Speedbota tak, aby poruszał się do przodu za pomocą tylko jednej instrukcji.
Speedbot jest gotowy do ruchu!
Ta eksploracja zapewni Ci narzędzia umożliwiające zaprogramowanie Speedbota do prostych ruchów. Na koniec tego ćwiczenia weźmiesz udział w wyzwaniu ćwiczeń koszykarskich, wykorzystując zachowania do przodu, do tyłu i oczekiwania.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
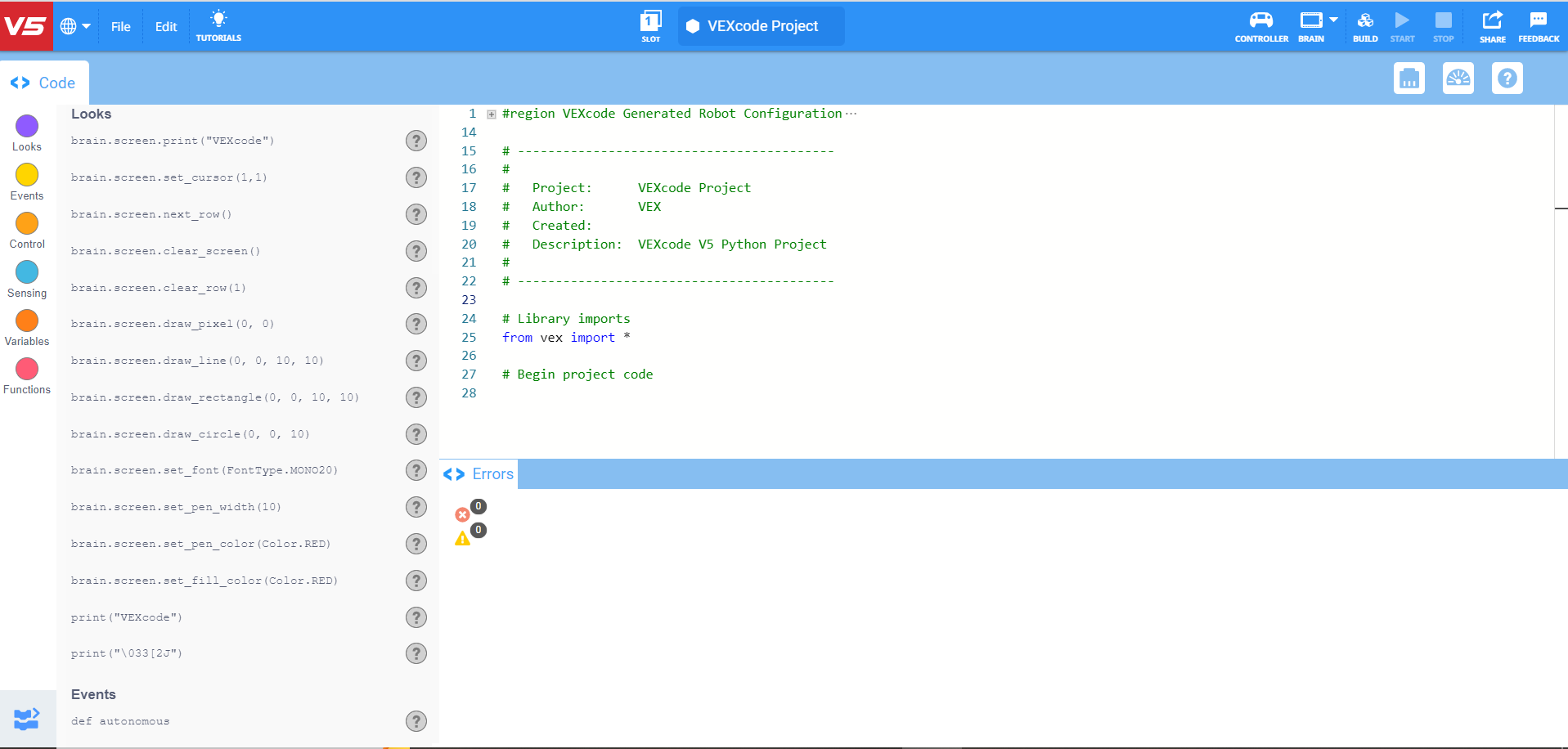
Oto przegląd interfejsu użytkownika VEXcode V5. Studenci zostaną zapoznani z tymi zakładkami/przyciskami podczas zajęć w tym laboratorium Medbot STEM. W całym laboratorium STEM dostępne są także łącza umożliwiające uzyskanie dodatkowych informacji na temat tych zakładek/przycisków.
-
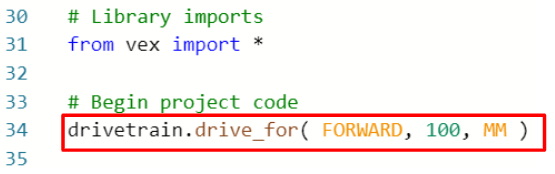
Instrukcje VEXcode V5, które zostaną użyte w tej eksploracji:
-
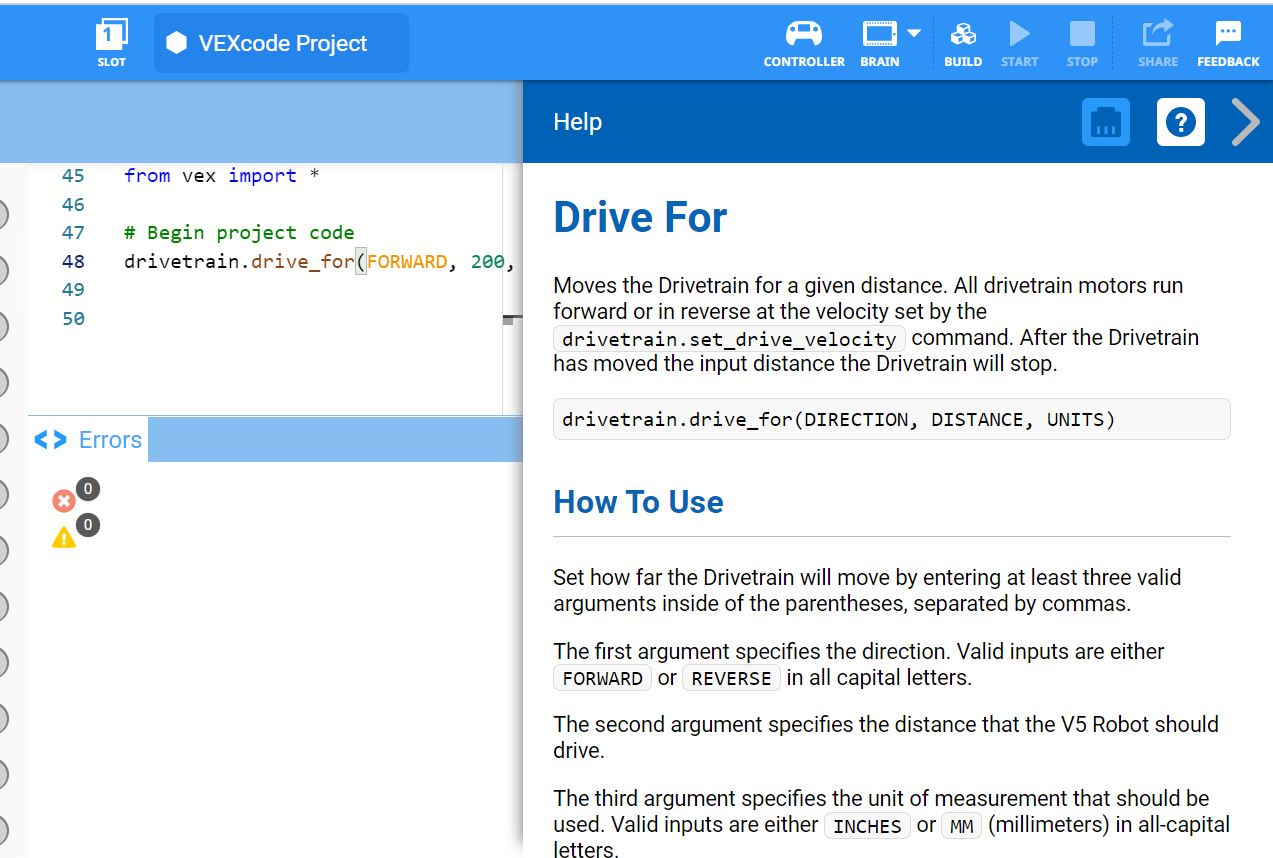
układ napędowy.napęd_for(DO PRZODU, 200, MM)
-
czekaj (1, sekundy)
-
-
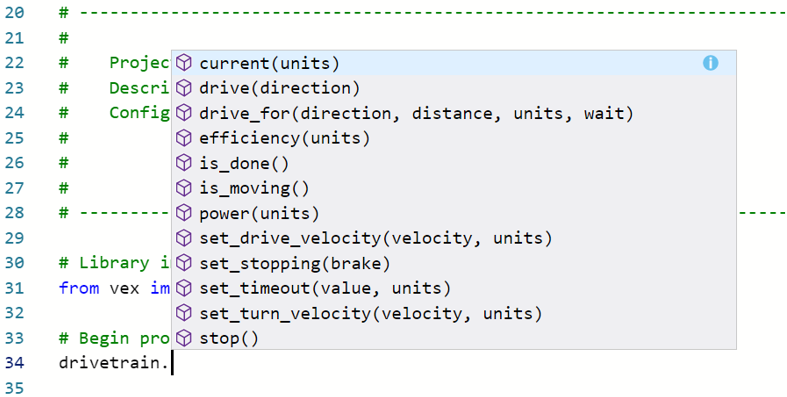
Aby dowiedzieć się więcej o instrukcji, wybierz Pomoc, a następnie wybierz ikonę znaku zapytania obok polecenia, aby wyświetlić więcej informacji.
-
Upewnij się, że masz wymagany sprzęt, swój notatnik inżynierski i VEXcode V5 pobrany i gotowy.
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Jeśli uczeń po raz pierwszy korzysta z VEXcode V5, może w każdej chwili skorzystać z Samouczków. Samouczki znajdują się na pasku narzędzi. 
| Ilość | Potrzebne materiały |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Naładowany akumulator robota |
| 1 |
Kod VEX V5 |
| 1 |
Kabel USB (w przypadku korzystania z komputera) |
| 1 |
Notatnik inżynieryjny |
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Modeluj każdy etap rozwiązywania problemów dla uczniów.
Krok 1: Przygotowanie do eksploracji
Czy zanim rozpoczniesz ćwiczenie, masz gotowy każdy z tych elementów? Sprawdź każdy z poniższych elementów:
-
Czy inteligentne kable są całkowicie włożone do wszystkich silników?
-
Czy Brain jest włączony?
-
Czy akumulator jest naładowany?
Krok 2: Rozpocznij nowy projekt
Aby rozpocząć projekt, wykonaj następujące kroki:
-
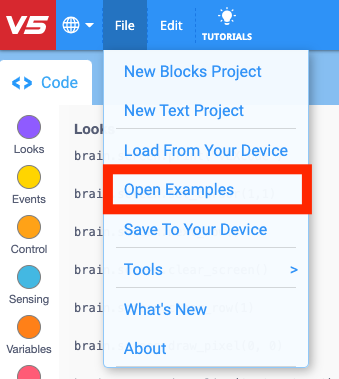
Otwórz menu Plik i wybierz Otwórz przykłady.
-
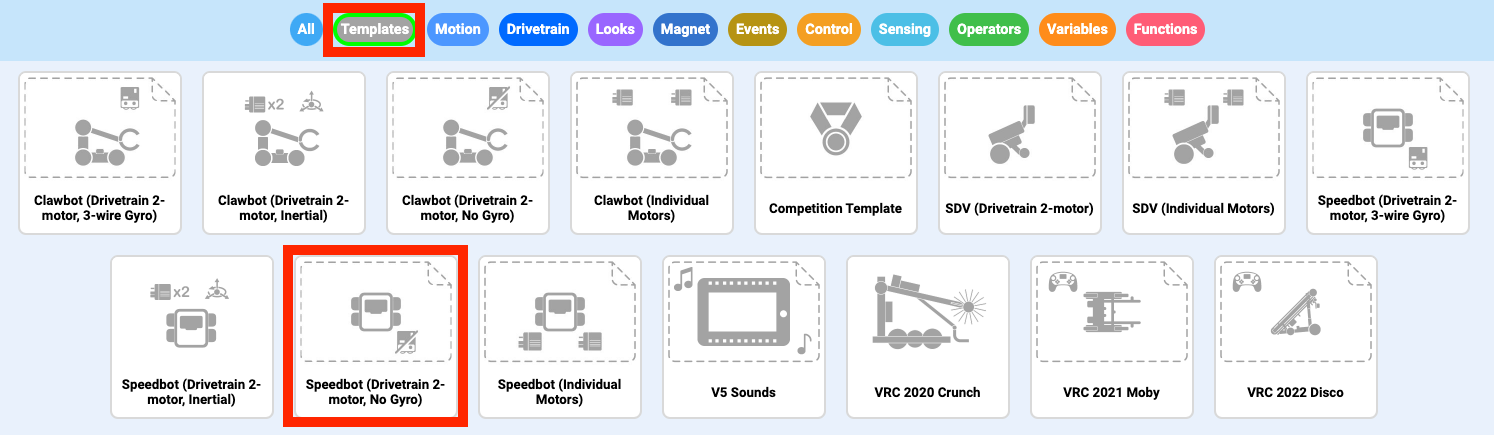
Wybierz i otwórz projekt szablonu Speedbot (2-silnikowy układ napędowy, bez żyroskopu). Projekt szablonu zawiera konfigurację silnika Speedbota . Jeśli szablon nie zostanie użyty, Twój robot nie uruchomi poprawnie projektu.
-
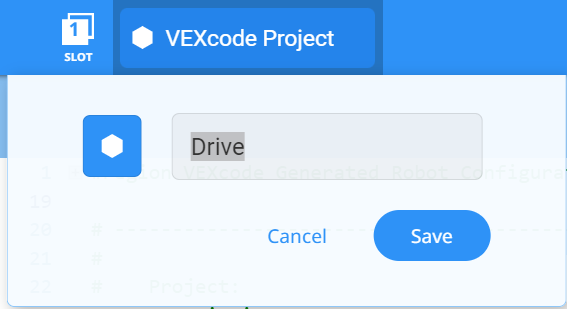
Ponieważ będziesz pracować nad przesuwaniem Speedbota do przodu i do tyłu, nadasz swojemu projektowi nazwę Drive. Kliknij nazwę projektu, wpisz Drive i wybierz Zapisz.
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
-
Nazwy projektów mogą zawierać spacje pomiędzy słowami lub po nich.

-
Możesz poprosić uczniów, aby do nazwy projektu dodali swoje inicjały lub nazwę grupy. Pomoże to rozróżnić projekty, jeśli poprosisz uczniów o ich przesłanie.
-
Ponieważ jest to pierwsze ćwiczenie z programowania, jakie mogą podjąć uczniowie, należy modelować poszczególne kroki, a następnie poprosić uczniów o wykonanie tych samych czynności. Następnie nauczyciel powinien monitorować uczniów, aby upewnić się, że prawidłowo wykonują podane czynności.
-
Upewnij się, że uczniowie wybrali opcję Otwarte przykłady z menu Plik.
-
Upewnij się, że uczniowie wybrali projekt szablonowy Speedbot (2-silnikowy układ napędowy, bez żyroskopu).
-
Możesz wskazać uczniom, że na stronie Przykłady jest kilka opcji do wyboru. Budując i używając innych robotów, będą mieli okazję korzystać z różnych szablonów.
- Sprawdź, czy nazwa projektu Drive znajduje się teraz w oknie pośrodku paska narzędzi.

![]() Przybornik nauczyciela
-
Zapisywanie projektów
Przybornik nauczyciela
-
Zapisywanie projektów
-
Zwróć uwagę, że kiedy po raz pierwszy otworzyli VEXcode V5, okno miało etykietę VEXcode Project. Projekt VEXcode jest domyślną nazwą projektu przy pierwszym otwarciu VEXcode V5. Po zmianie nazwy projektu na Dysk i zapisaniu wyświetlacz został zaktualizowany, aby pokazać nową nazwę projektu. Korzystając z tego okna na pasku narzędzi, łatwo sprawdzić, czy uczniowie korzystają z właściwego projektu.
-
Powiedz uczniom, że są teraz gotowi, aby rozpocząć swój pierwszy projekt. Wyjaśnij uczniom, że wykonując kilka prostych kroków, będą w stanie stworzyć i uruchomić projekt, który popchnie Speedbota do przodu.
-
Przypomnij uczniom, aby zapisali swoje projekty w trakcie pracy. Sekcja Python z biblioteki VEX wyjaśnia praktyki zapisywania w VEXcode V5.
![]() Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Jest to dobry moment na przerwę i poproszenie uczniów o przejrzenie, indywidualnie lub w grupach, kroków, które właśnie zostały wykonane podczas rozpoczynania nowego projektu w VEXcode V5. Poproś uczniów, aby zastanowili się indywidualnie, zanim podzielą się informacjami w swojej grupie lub całej klasie.
Krok 3: Jedź do przodu
Możesz teraz rozpocząć programowanie robota, aby jechał do przodu!
-
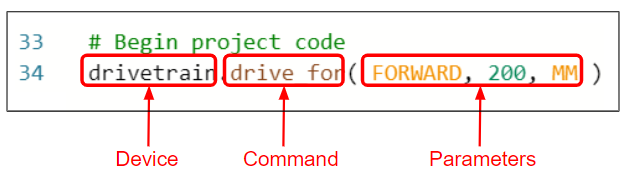
Zanim zaczniemy programować, musimy zrozumieć, czym jest instrukcja. Instrukcja składa się z trzech części. Więcej informacji na temat kolorowania kodu w VEXcode V5 Python w tym artykule.
-
Dodaj instrukcję do projektu:
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Gdy zaczniesz wpisywać instrukcję, możesz zauważyć funkcję autouzupełniania. Użyj klawiszy „W górę” i „W dół”, aby wybrać żądaną nazwę, a następnie naciśnij „Tab” lub (Enter/Return) na klawiaturze, aby dokonać wyboru. Aby uzyskać więcej informacji na temat tej funkcji, zapoznaj się z artykułem Python.
-
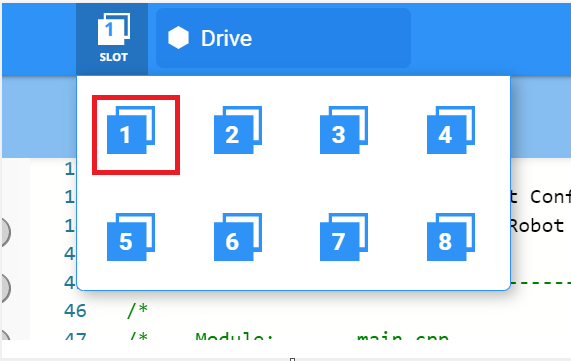
Wybierz ikonę Slot, aby wybrać jedno z ośmiu dostępnych slotów w Robot Brain i wybierz slot 1.
-
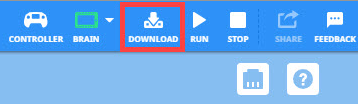
Podłącz V5 Robot Brain do komputera za pomocą kabla micro USB i włącz V5 Robot Brain. Ikona Brain na pasku narzędzi zmieni kolor na zielony po pomyślnym nawiązaniu połączenia.

-
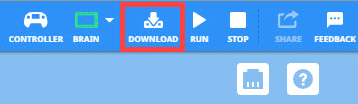
Wybierz Pobierz , aby pobrać projekt do Brain.
![]() Zestaw narzędzi nauczyciela
Zestaw narzędzi nauczyciela
- Przypomnij uczniom, aby odłączyli kabel USB od mózgu robota. Podłączenie robota do komputera podczas wykonywania projektu może spowodować, że robot będzie ciągnął za kabel połączeniowy.
![]() Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Poproś uczniów, aby przewidzieli, co ich zdaniem się stanie, gdy projekt zostanie pobrany i uruchomiony w Speedbocie. Powiedz uczniom, aby zapisali swoje przewidywania w zeszytach inżynierskich. Jeśli czas na to pozwala, poproś każdą grupę o podzielenie się swoją prognozą.
-
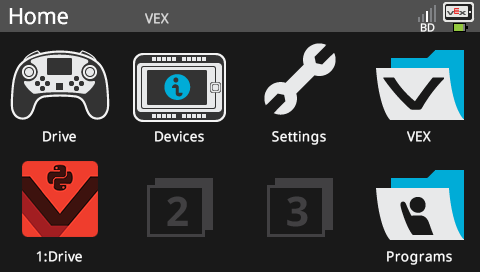
Sprawdź, czy Twój projekt został pobrany (Python) patrząc na ekran Robot Brain. Nazwa projektu Napęd powinna znajdować się w Slocie 1.
![]() Przybornik nauczyciela
-
Model First
Przybornik nauczyciela
-
Model First
- Modeluj uruchamianie projektu przed klasą, zanim wszyscy uczniowie spróbują jednocześnie. Zbierz uczniów w jednym miejscu i zostaw wystarczająco dużo miejsca, aby Speedbot mógł się poruszać, jeśli zostanie umieszczony na podłodze.
- Powiedz uczniom, że teraz ich kolej na realizację projektu. Upewnij się, że mają wolną drogę i że żadne Speedboty nie wpadną na siebie.
-
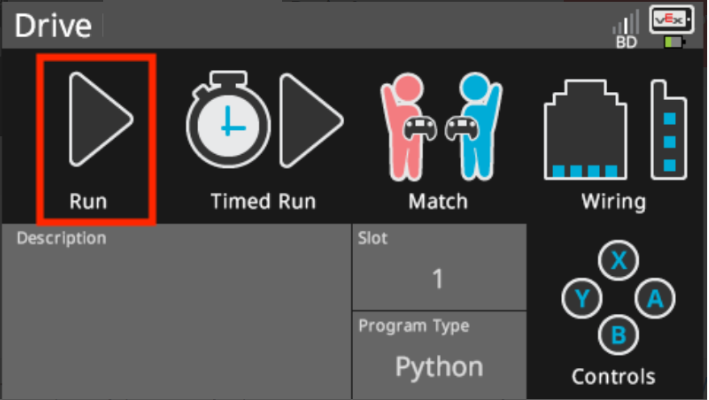
Uruchom (Python) projekt na robocie, upewniając się, że projekt jest wybrany, a następnie naciśnij przycisk Uruchom na Robot Brain. Gratulujemy stworzenia pierwszego projektu!
Krok 4: Jedź do tyłu
Teraz, gdy zaprogramowałeś robota, aby jechał do przodu, zaprogramujmy go tak, aby jechał do tyłu.
-
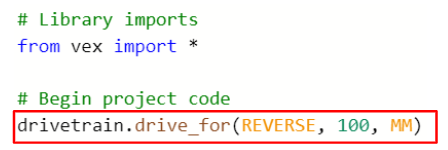
Zmień parametr w instrukcji napędu na DO TYŁU zamiast DO PRZODU.
-
Wybierz nazwę projektu, aby zmienić ją z Drive na Reverse.

-
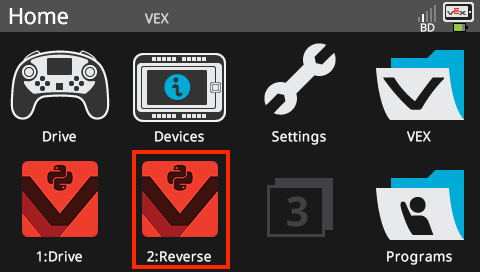
Wybierz ikonę slotu, aby wybrać nowy slot. Wybierz miejsce 2.

-
Pobierz (Python) projekt.

-
Sprawdź, czy Twój projekt został pobrany (Python) patrząc na ekran Robot Brain. Nazwa projektu Reverse powinna być wymieniona w Slocie 2.
-
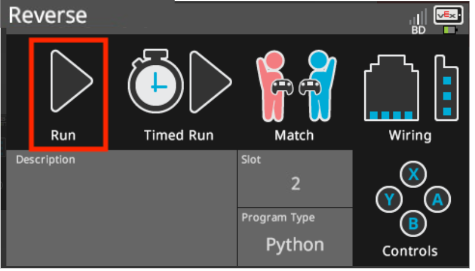
Uruchom (Python) projekt na robocie, upewniając się, że projekt jest wybrany, a następnie naciśnij przycisk Uruchom na Robot Brain.
![]() Zestaw narzędzi nauczyciela
-
Ukończenie kroku 4
Zestaw narzędzi nauczyciela
-
Ukończenie kroku 4
-
Aby zmienić polecenie drive_for z do przodu na do tyłu, po prostu zmień pierwszy parametr na REVERSE. Spowoduje to ruch silników w układzie napędowym w przeciwnym kierunku.
-
Liczbę mm można zmienić, ale w tym przykładzie pozostawimy ją na poziomie 100 mm, zgodnie z ustawieniem w poprzednim kroku.
-
Przypomnij im, aby przed uruchomieniem projektu odłączyli kabel USB od Robot Brain.
-
Przypomnij uczniom, aby zapisali swoje projekty w trakcie pracy. Sekcja Python z biblioteki VEX wyjaśnia praktyki zapisywania w VEXcode V5.
Krok 5: Poczekaj, a następnie wjedź wstecz
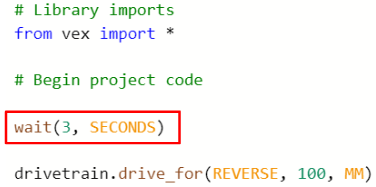
Teraz, gdy zaprogramowaliśmy robota, aby jechał do przodu, a następnie do tyłu, możemy teraz dodać instrukcję czekaj , aby robot odczekał określoną ilość czasu przed jazdą do tyłu.
-
Dodaj instrukcję czekaj , jak pokazano. To każe robotowi odczekać trzy sekundy przed jazdą do tyłu.
-
Wybierz nazwę projektu, aby zmienić ją z Reverse na WaitReverse.
-
Wybierz ikonę slotu, aby wybrać nowy slot. Wybierz miejsce 3.

-
Pobierz (Python) projekt.
-
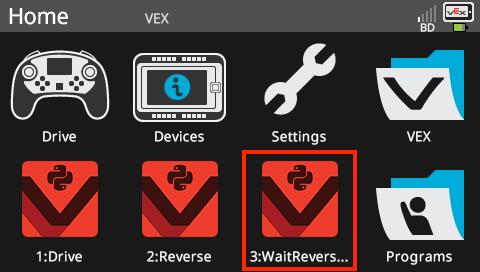
Sprawdź, czy Twój projekt został pobrany (Python) patrząc na ekran Robot Brain. Nazwa projektu WaitReverse powinna znajdować się w polu 3.
-
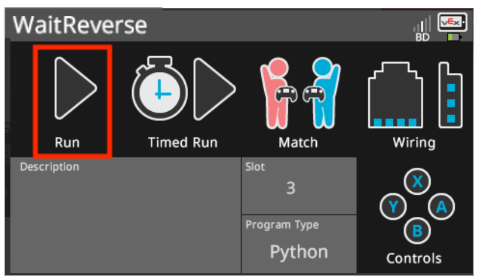
Uruchom (Python) projekt na robocie, upewniając się, że projekt jest wybrany, a następnie naciśnij przycisk Uruchom .
![]() Zestaw narzędzi nauczyciela
-
Ukończenie kroku 5
Zestaw narzędzi nauczyciela
-
Ukończenie kroku 5
- Użycie polecenia wait nie zakończy projektu, a jedynie wstrzyma ruch robota.
- Jeśli uczniowie korzystają z komputera, przypomnij im, aby przed rozpoczęciem projektu odłączyli kabel USB od Robot Brain.
- Przypomnij uczniom, aby zapisali swoje projekty w trakcie pracy. Sekcja Python z biblioteki VEX wyjaśnia praktyki zapisywania w VEXcode V5.
Krok 6: Ukończ wyzwanie ćwiczeń koszykarskich!
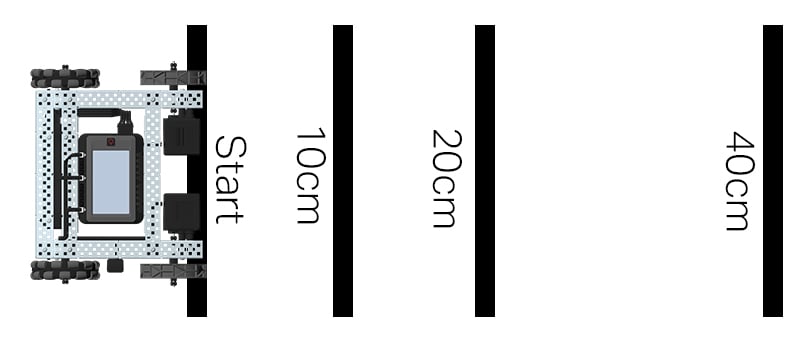
Układ wyzwań związanych z ćwiczeniami koszykarskimi
W wyzwaniu Basketball Drills Challenge robot musi być w stanie poruszać się po szeregu linii w różnych odległościach. Robot przejedzie do przodu do pierwszej linii znajdującej się 10 cm od pozycji wyjściowej, odczeka 1 sekundę, a następnie cofnie się, wracając do tej samej linii. Następnie robot powtórzy czynność, podjeżdżając 20 cm do przodu do drugiej linii, odczekuje 1 sekundę, a następnie cofa się do pierwotnej linii startu. Robot podjedzie do trzeciej linii z odległości 40 cm, odczeka 1 sekundę, a następnie na koniec wróci na linię startu, aby zakończyć wyzwanie.
Przed zaprogramowaniem robota zaplanuj w swoim notatniku inżynierskim ścieżkę robota i jego zachowania.
Po ukończeniu wyzwania koszykarskiego będziesz mógł łączyć ruchy do przodu i do tyłu z dodatkowymi zachowaniami robota, aby ukończyć jeszcze bardziej zaawansowane wyzwania.
Podczas programowania należy pamiętać, że 1 cm = 10 mm.
![]() Zestaw narzędzi dla nauczycieli
-
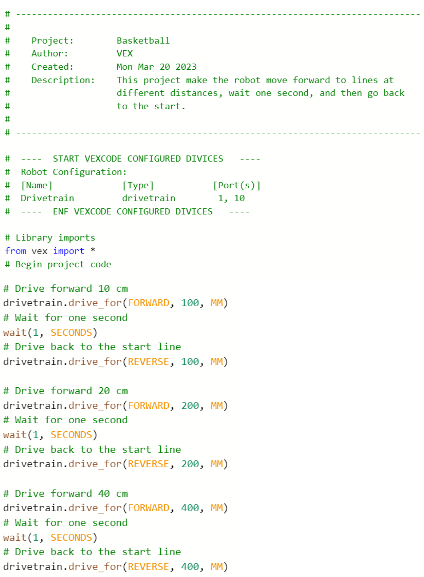
Rozwiązanie
Zestaw narzędzi dla nauczycieli
-
Rozwiązanie
Zobacz przykładowe rozwiązanie poniżej:
![]() Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Poproś uczniów, aby podzielili się swoimi rozwiązaniami w parach, zanim omówią je w całej klasie. Ułatw dyskusję, zadając pytanie:
- Czy napotkałeś jakieś trudności podczas programowania tego wyzwania?
- Czy Twój robot zachowywał się tak, jak tego oczekiwałeś na podstawie projektu? Dlaczego lub dlaczego nie?
- Gdybyś mógł podjąć wyzwanie jeszcze raz, czy jest coś, co zrobiłbyś inaczej?