
Controller: Tank Drive Exploration- Blocks-based
![]() Teacher Toolbox
-
The Purpose of this Activity
Teacher Toolbox
-
The Purpose of this Activity
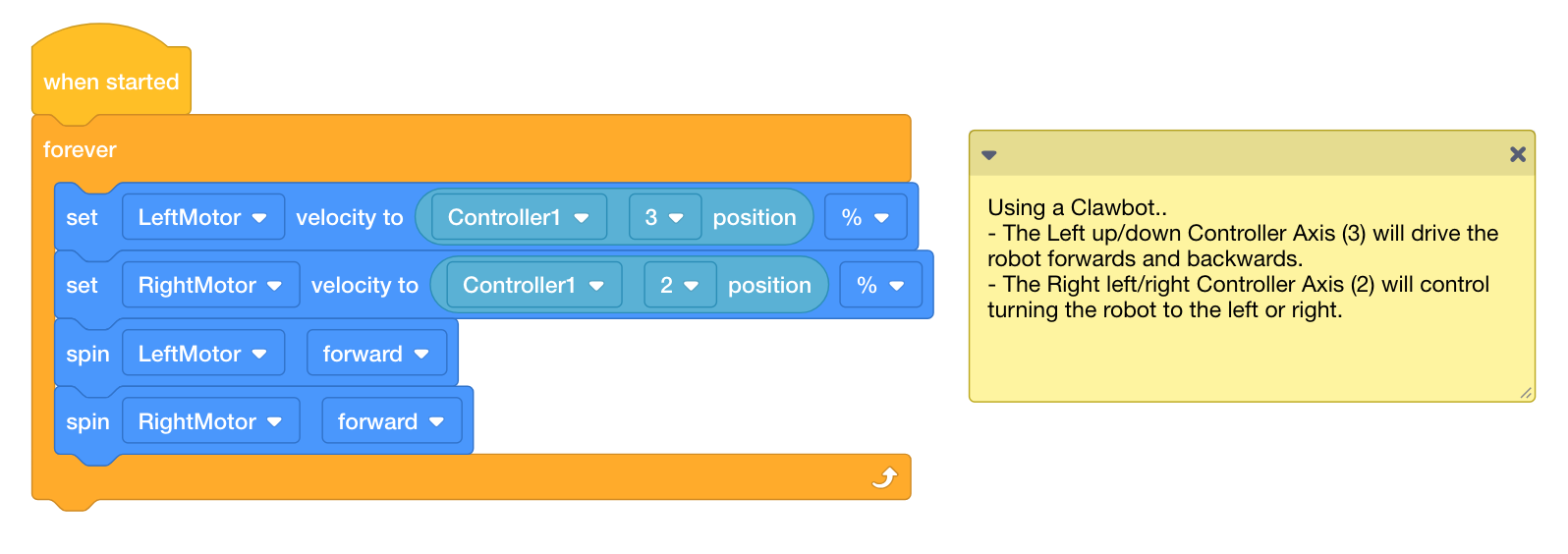
Using the Tank Drive example project enables the students to control the Clawbot using the Controller. Students will need to adjust the parameters in the [set motor velocity], [spin], and (position of controller) blocks to control the velocity for each of the Clawbot’s motors and enable the Controller to control the motor functions.
For more information about any of the blocks, visit the help information within VEXcode V5.
The following is an outline of what the students will do in this activity:
-
Watch the Using Loops tutorial video.
-
Explore the Tank Drive example project.
-
Understand the use of the [forever] block.
-
Complete the Robo-Slalom challenge!
![]() Teacher Tips
Teacher Tips
If this is the student's first time using VEXcode V5, they can also see the Tutorials in the toolbar to learn other basic skills.
| Quantity | Materials Needed |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (with up-to-date firmware) |
| 1 |
VEXcode V5 (latest version, Windows, macOS, Chromebook) |
| 1 |
Engineering Notebook |
| 1 |
Using Loops (Tutorial) |
| 1 |
Tank Drive example project |
| 2 or more |
Classroom items to be used as obstacles |
This activity will give you the tools to program your Controller.
You can use the Help information inside of VEXcode V5 to learn about the blocks. For guidance in using the Help feature, see the Using Help tutorial.

Step 1: Let's start programming the Controller.
- Start by watching the Using Loops tutorial video.
-
Open the Tank Drive example project.
Do the following in your engineering notebook:
Predict what the project will have the Clawbot do. Explain more than the fact that the project utilizes the Controller.
How do the joysticks move the robot? What is the Clawbot doing?
![]() Teacher Toolbox
-
Answers
Teacher Toolbox
-
Answers
This project will utilize the [forever] block to continuously check where the left and right Joystick's positions are. When the left (or right) Joystick is pushed up, the velocity is set for how far forward the Joystick is pushed. Thus, the farther forward the Joystick is pushed, the faster the velocity will be set and the faster the motors will move. The same idea works for pushing the Joystick down. The farther down the Joystick is pushed, the faster the motors will move in reverse.

![]() Teacher Toolbox
-
[Forever] blocks
Teacher Toolbox
-
[Forever] blocks
This step discusses the importance of the [forever] block. You should review the information as a class. You can model the behavior with your Clawbot and Controller, or if time permits, have the students run the program without the [forever] block.
What are the benefits of using the [forever] block?
Here is our project without the [forever] block:
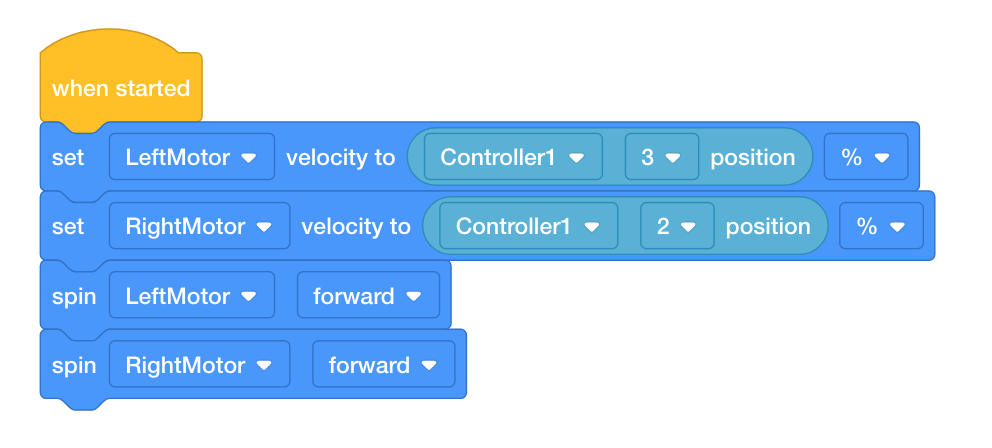
What do you think would happen if this program were run? Discuss as a group. Write down your prediction in the engineering notebook.
![]() Teacher Toolbox
-
Understanding the Block
Teacher Toolbox
-
Understanding the Block
Without the [forever] loop, the velocity’s value for each motor is set as soon as the project is run, and that value remains constant until the project is stopped. In other words, if you run the project without moving either Joystick, because the Joystick’s default position on its axis is 0, the velocity of both motors will remain at 0, even if you move the Joystick.
Likewise, let’s say you move the left Joystick up as far as it will go along position 3 and hold it there. If you run the project above, the left motor will move at full speed and will remain at that velocity even if you move the Joystick down along position 3. This is because Clawbot receives its initial instruction from the Controller as soon as the project is run; however, without a Loop, that initial value cannot update.
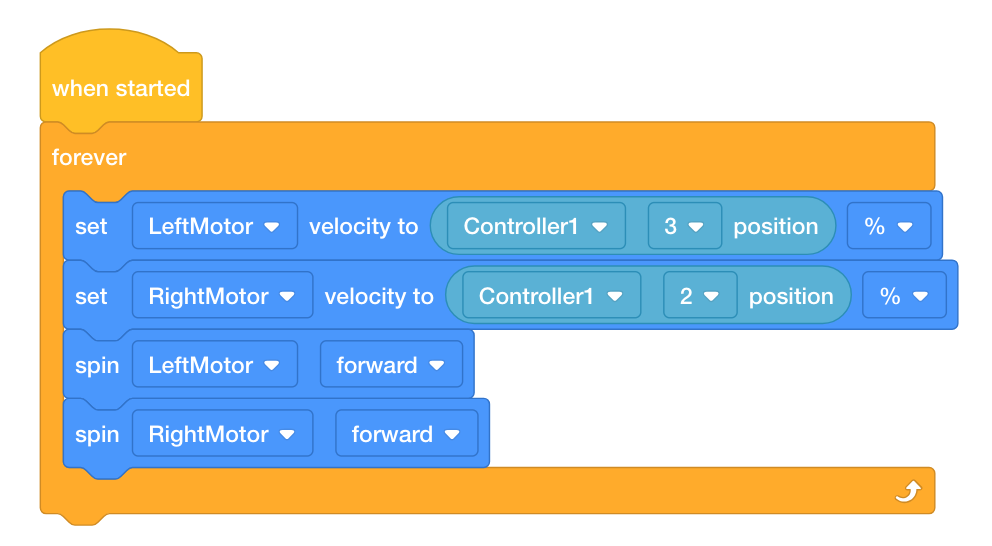
The [forever] loop tells the Clawbot to constantly update the velocity and run for the duration of the project. In other words, the [forever] loop, in this project, enables you to change the velocity of each motor by moving either Joystick along position 2 or 3, and the Clawbot will respond accordingly until you stop the project or turn off the Clawbot.
Step 3: Navigate a Slalom Course!
![]() Teacher Toolbox
-
Setup the Activity
Teacher Toolbox
-
Setup the Activity
Organize the students into small groups of 2 or 4 students. One student should be designated as the Driver - the person who will use the Controller to maneuver the Clawbot.
Have students complete this slalom by using the Controller to move the Clawbot along the outside of each “flag.” The Clawbot’s path must prevent it from touching any flag and allow it to cross the finish line. Flags can be any classroom material/object you have handy (eraser, roll of tape, tissue box) and can be set in place prior to operating the Clawbot.
If time permits, have students switch roles to give others the opportunity to drive the Clawbot. You could even turn this into a competition within groups or between groups by seeing how quickly each driver can navigate the slalom.

Slaloms are courses which the participant must navigate around the set flags, or markers. Ski slaloms are a popular winter sport and are included in the Winter Olympics.
Now that the Controller is paired and the project is downloaded, you are ready to move your Clawbot using the Controller!
- Collect the four classroom items you will use as flags in your slalom from the teacher.
- Collaborate to set the flags in place for the Driver to navigate the Clawbot around, according to the slalom diagram.
- Download Tank Drive Example project. If there are any questions about how to download a project, check out the Download and Run a Project tutorial.
![]() Motivate Discussion
-
Reflecting on the Activity
Motivate Discussion
-
Reflecting on the Activity
Q: Did the Clawbot respond to the Controller as you expected it to?
A: Answers will vary; however, the goal of this question is to promote cognitive thinking. Students began by predicting behaviors before testing them, documenting their results, and reflecting.
Q: What is the biggest challenge in moving the Clawbot forward or reverse in a straight line?
A: While answers may vary, a common response should be that both Joysticks must move in sync with one another to ensure that the Clawbot’s motors are moving in the same direction and at the same velocity.
Q: How does using the [forever] loop enable you to continuously use the Controller to move the Clawbot?
A: Without the forever loop, the Clawbot would only perform the behaviors as determined by the blocks in the project once. The forever loop tells the Clawbot to constantly update the velocity and run for the duration of the project. In other words, the forever loop enables you to use the Controller to move the Clawbot indefinitely, or until the battery dies.
Step 4: Robo-Slalom
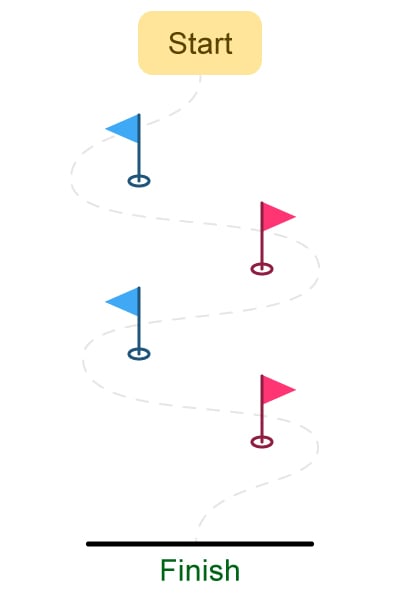
Use the Controller to move your Clawbot along the outside of each “flag.” The robot’s path must prevent it from touching any flag, and allow it to cross the finish line.
- Run the project and drive the Clawbot forward and reverse, and turn left and right using both Joysticks.
- Time how long it takes for the Clawbot to complete the course. Document the times in the engineering notebook.
- How fast can you get Clawbot through the Slalom course?