
Bộ thao tác ma sát Grabber
Bộ điều khiển ma sát
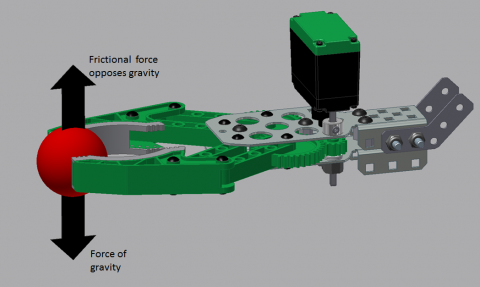
Bộ phận điều khiển ma sát tác dụng lực giữa vật thể và miếng đệm, sau đó dựa vào lực ma sát giữa vật thể và miếng đệm để điều khiển vật thể.
Dạng phổ biến nhất của bộ phận điều khiển này là một cái càng kẹp chặt vật thể. Móng vuốt ấn vào đối tượng cung cấp lực, và ma sát giữa móng vuốt và đối tượng cho phép đối tượng được thao tác.