
الدرس 4: تحدي كسارة القلعة الديناميكية
في تحدي كسارة القلعة الديناميكية، يجب على روبوت الواقع الافتراضي الآن إزالة جميع القطع من كل تكرار لملعب كسارة القلعة الديناميكية، بأسرع طريقة ممكنة!
مخرجات التعلم
- تطبيق منطق القرارات المتكررة باستخدام مستشعرات متعددة لحل تحدي كسارة القلعة الديناميكية.
تجميع كل شيء معًا
تمكن الخوارزميات المستخدم من إنشاء مشاريع أكثر تنوعًا وكفاءة. الخوارزميات هي تسلسلات دقيقة من التعليمات التي يمكن أن تستخدم الاختيار والتكرار لتوجيه روبوت الواقع الافتراضي لاستخدام المعلومات من بيئته لتنفيذ السلوكيات.

تستخدم الخوارزميات الحلقات للتحقق باستمرار من قيم المستشعر، وتكرار السلوكيات. إن تضمين العبارات الشرطية داخل حلقات مثل حلقات while غير المحدودة أو حلقات أو while مع شرط وليس سيطلب من روبوت الواقع الافتراضي التحقق من هذه الشروط بشكل مستمر.
def main ():
while True:
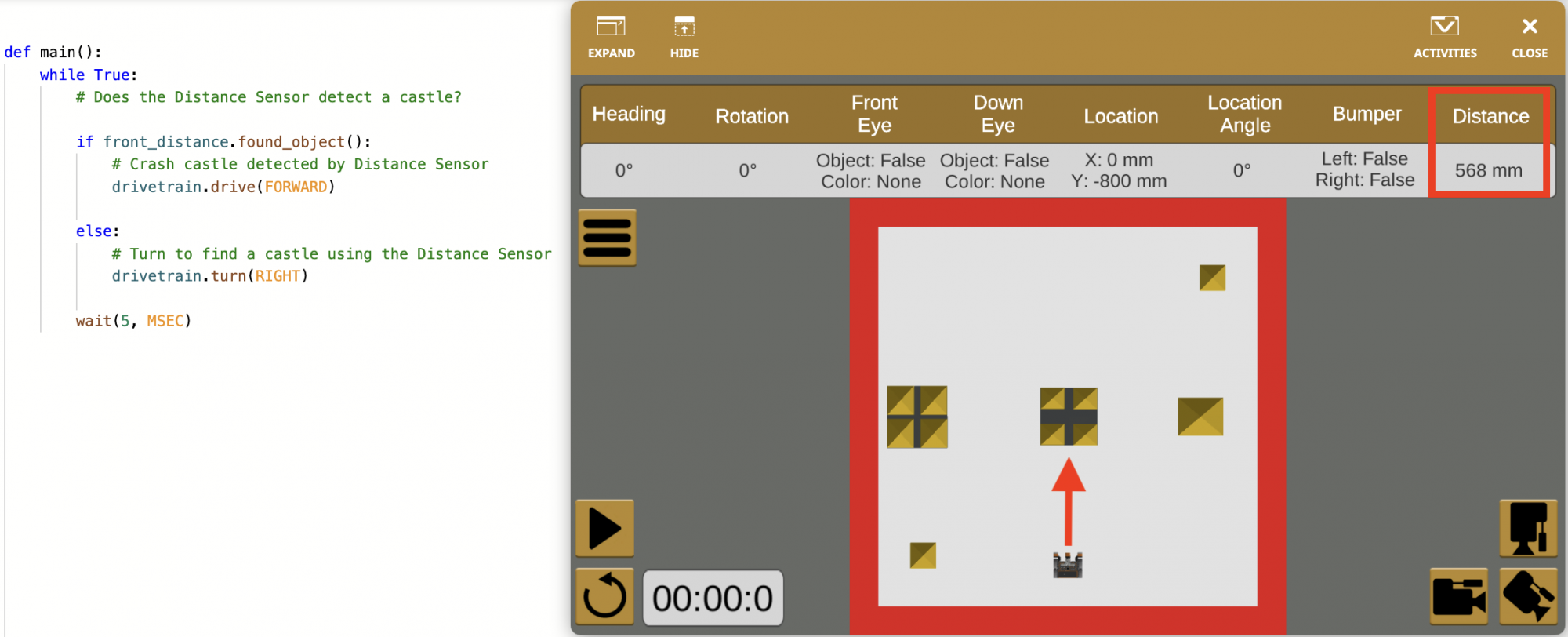
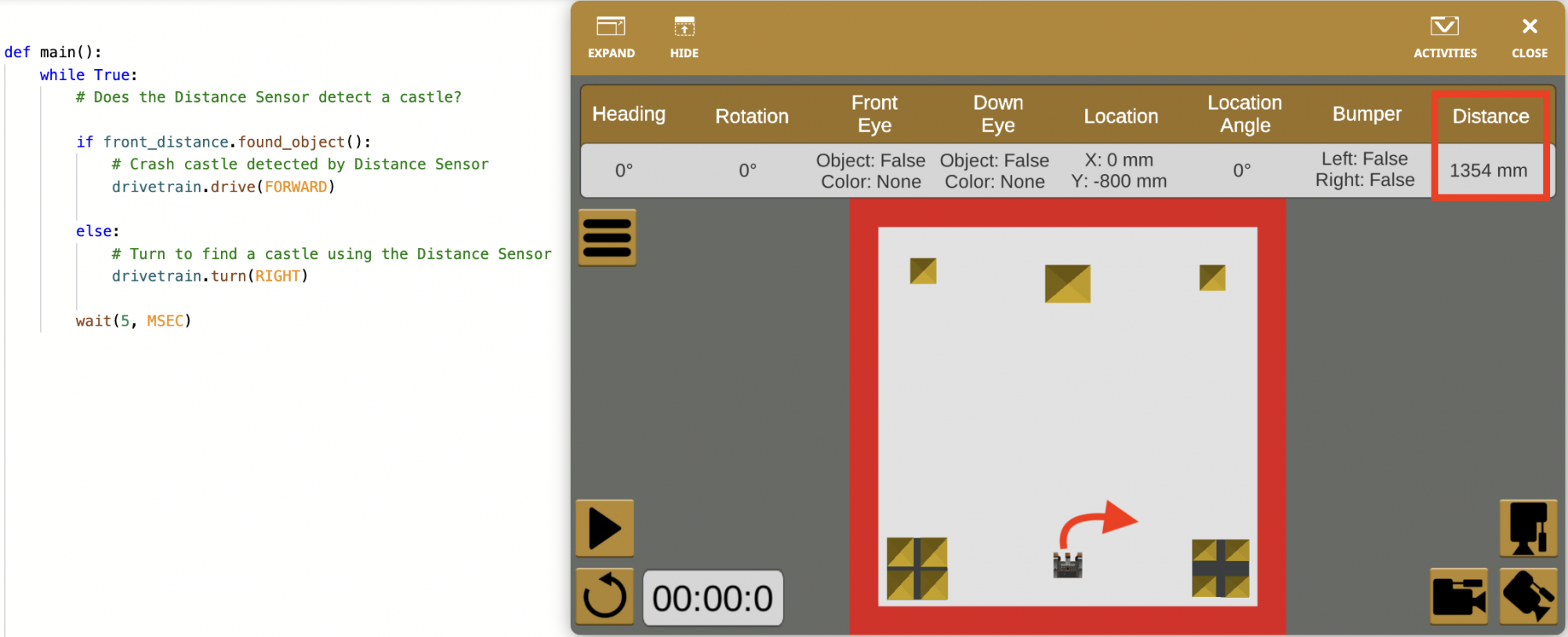
if distance.found_object ():
# اضغط على المبنى الذي تم العثور عليه باستخدام مستشعر المسافة drivetrain.drive
(للأمام)
آخر:
# استدر للعثور على مبنى باستخدام مستشعر المسافة drivetrain.turn (
لليمين)
انتظر(5، مللي ثانية)يتم استخدام الاختيار باستخدام عبارات مشروطة مثل توجيه روبوت الواقع الافتراضي لتنفيذ سلوكيات معينة، اعتمادًا على الظروف المبلغ عنها، مثل قيم المستشعر.
يتيح استخدام المستشعرات ذات الحلقات والاختيار للروبوت VR التفاعل مع بيئة متغيرة، مثل Dynamic Castle Crasher Playground.
تحدي كسارة القلعة الديناميكية
في هذا التحدي، قم بإنشاء مشروع حيث يستخدم روبوت الواقع الافتراضي خوارزمية لضرب جميع قطع القلعة من ملعب Dynamic Castle Crasher، في أقصر فترة زمنية ممكنة.
يتطلب حل تحدي كسارة القلعة الديناميكية استخدام المؤقت في نافذة الملعب.
اتبع هذه الخطوات لإكمال التحدي:
- إنشاء مشروع جديد أو تحميل مشروع من الدروس السابقة في هذه الوحدة. في حالة إنشاء مشروع جديد، حدد Dynamic Castle Crasher Playground عند مطالبتك بذلك.
- إعادة تسمية المشروع Unit9Challenge.
- افتح نافذة الملعب إذا لم تكن مفتوحة بالفعل. تأكد من أن ملعب Dynamic Castle Crashers مفتوح.
- أضف الأوامر اللازمة لقيادة روبوت الواقع الافتراضي لدفع جميع قطع البناء خارج ملعب Dynamic Castle Crasher في أقصر وقت ممكن. يجب ألا يسقط روبوت الواقع الافتراضي من الملعب.
- ابدأ المشروع لاختبار ما إذا كان يعمل. يجب أن تعمل الخوارزمية بغض النظر عن تخطيط الملعب.
- قم بتوثيق الوقت الذي استغرقه إكمال التحدي على قطعة من الورق.
- استمر في مراجعة المشروع وتشغيله حتى يكمل روبوت الواقع الافتراضي بنجاح تحدي كسارة القلعة الديناميكية في أقصر وقت.
- احفظ المشروع بمجرد أن يطرق روبوت الواقع الافتراضي بنجاح جميع قطع البناء من ملعب Dynamic Castle Crasher في وقت قياسي.
تهانينا! لقد أكملت بنجاح تحدي محطم القلعة الديناميكي!