
പാഠം 4: ഡൈനാമിക് കാസിൽ ക്രാഷർ ചലഞ്ച്
ഡൈനാമിക് കാസിൽ ക്രാഷർ ചലഞ്ചിൽ, VR റോബോട്ട് ഇപ്പോൾ ഡൈനാമിക് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ന്റെ ഓരോ ആവർത്തനത്തിൽ നിന്നും ALL പീസുകൾ പരമാവധി വേഗത്തിൽ എടുക്കണം!
പഠന ഫലം
- ഡൈനാമിക് കാസിൽ ക്രാഷർ ചലഞ്ച് പരിഹരിക്കാൻ ഒന്നിലധികം സെൻസറുകൾ ഉപയോഗിച്ച് ആവർത്തിച്ചുള്ള തീരുമാനങ്ങളുടെ യുക്തി പ്രയോഗിക്കുക.
എല്ലാം ഒരുമിച്ച് ചേർക്കൽ
അൽഗോരിതങ്ങൾ ഒരു ഉപയോക്താവിനെ കൂടുതൽ വൈവിധ്യപൂർണ്ണവും കാര്യക്ഷമവുമായ പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ പ്രാപ്തമാക്കുന്നു. പെരുമാറ്റങ്ങൾ നടപ്പിലാക്കുന്നതിനായി പരിസ്ഥിതിയിൽ നിന്നുള്ള വിവരങ്ങൾ ഉപയോഗിക്കാൻ വിആർ റോബോട്ടിനോട് നിർദ്ദേശിക്കുന്നതിന് തിരഞ്ഞെടുപ്പും ആവർത്തനവും ഉപയോഗിക്കാൻ കഴിയുന്ന നിർദ്ദേശങ്ങളുടെ കൃത്യമായ ശ്രേണികളാണ് അൽഗോരിതങ്ങൾ.

സെൻസർ മൂല്യങ്ങൾ തുടർച്ചയായി പരിശോധിക്കുന്നതിനും പെരുമാറ്റങ്ങൾ ആവർത്തിക്കുന്നതിനും അൽഗോരിതങ്ങൾ ലൂപ്പുകൾ ഉപയോഗിക്കുന്നു. ലൂപ്പുകളിൽ, ഇൻഫിനിറ്റ് വൈൽ ലൂപ്പുകൾ അല്ലെങ്കിൽ അല്ല കണ്ടീഷനുള്ളവൈൽലൂപ്പുകൾ പോലുള്ള കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ നെസ്റ്റുചെയ്യുന്നത്, ആ കണ്ടീഷനുകൾ തുടർച്ചയായി പരിശോധിക്കാൻ VR റോബോട്ടിനോട് നിർദ്ദേശിക്കും.
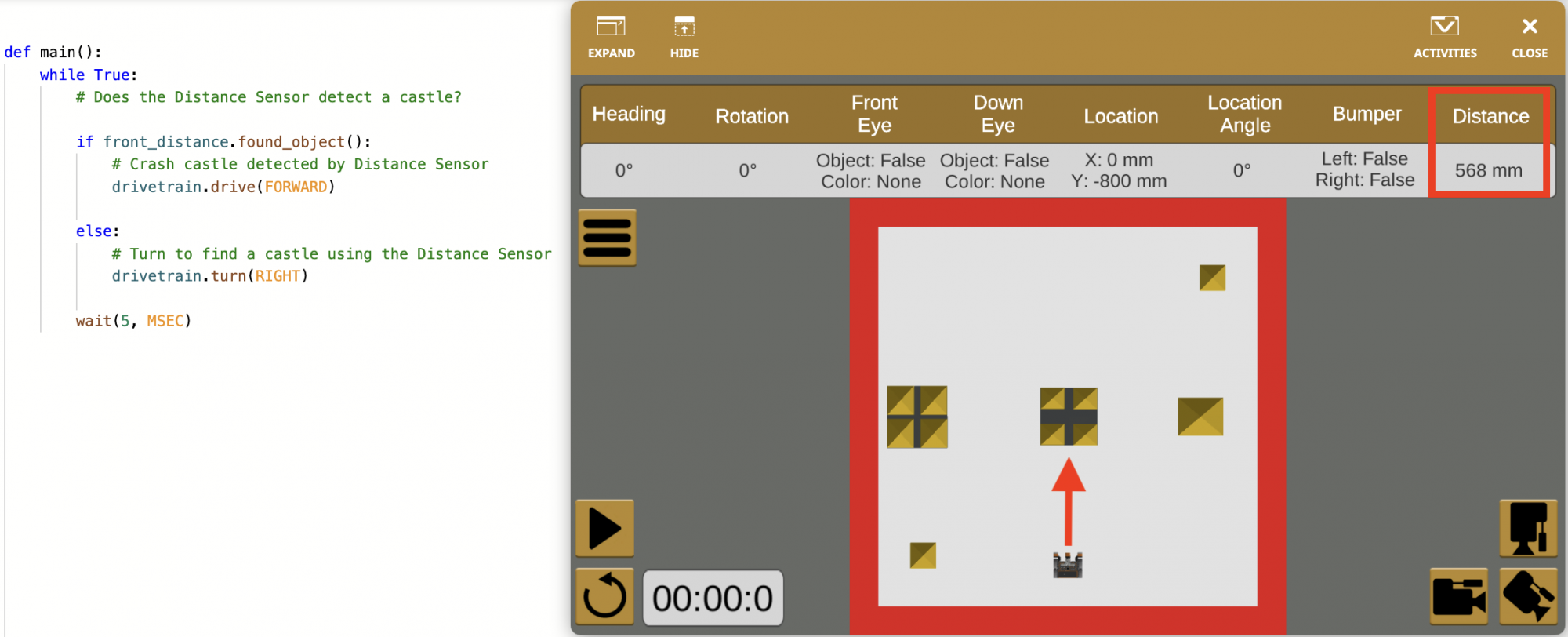
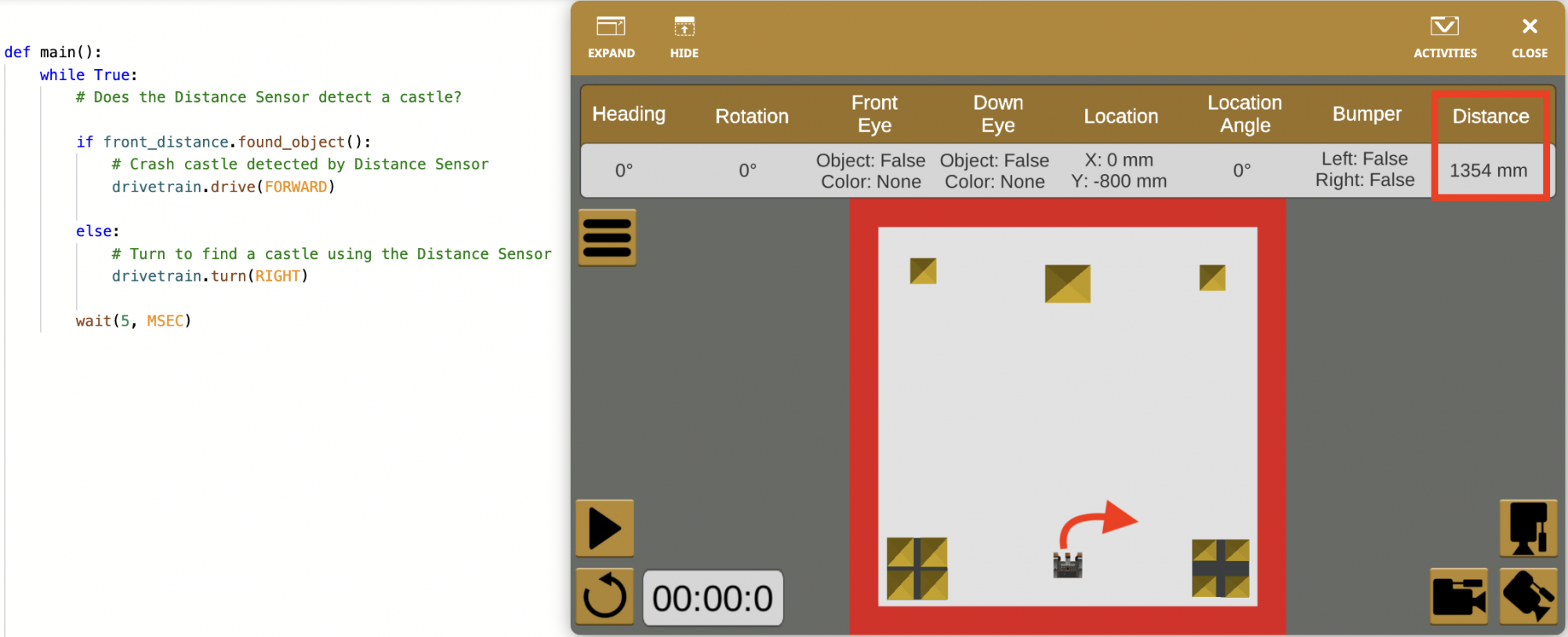
def main():
while True:
if distance.found_object():
# Distance Sensor
drivetrain.drive(FORWARD) ഉപയോഗിച്ച് കണ്ടെത്തിയ കെട്ടിടം മറിച്ചിടുക
else:
# Distance Sensor
drivetrain.turn(RIGHT) ഉപയോഗിച്ച് ഒരു കെട്ടിടം കണ്ടെത്താൻ തിരിയുക
wait(5, MSEC)സെൻസർ മൂല്യങ്ങൾ പോലുള്ള റിപ്പോർട്ട് ചെയ്ത അവസ്ഥകളെ ആശ്രയിച്ച്, ചില പെരുമാറ്റരീതികൾ നടപ്പിലാക്കാൻ VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുന്നതിന്, if else പോലുള്ള കണ്ടീഷണൽ സ്റ്റേറ്റ്മെന്റുകൾ ഉപയോഗിച്ചാണ് സെലക്ഷൻ ഉപയോഗിക്കുന്നത്.
ലൂപ്പുകളും സെലക്ഷനും ഉള്ള സെൻസറുകൾ ഉപയോഗിക്കുന്നത് ഡൈനാമിക് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്പോലുള്ള മാറിക്കൊണ്ടിരിക്കുന്ന പരിതസ്ഥിതിയുമായി സംവദിക്കാൻ VR റോബോട്ടിനെ പ്രാപ്തമാക്കുന്നു.
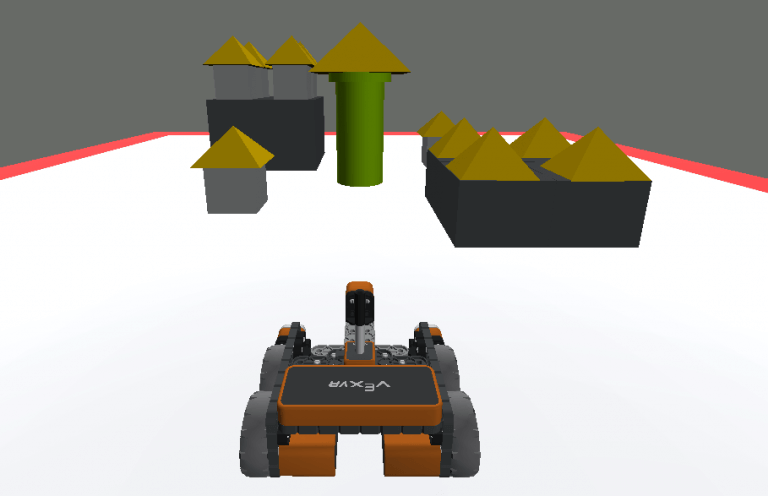
ഡൈനാമിക് കാസിൽ ക്രാഷർ ചലഞ്ച്
ഈ വെല്ലുവിളിയിൽ, ഡൈനാമിക് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്ന്റെ എല്ലാ കാസിൽ പീസുകളും ഏറ്റവും കുറഞ്ഞ സമയത്തിനുള്ളിൽ വിആർ റോബോട്ട് ഒരു അൽഗോരിതം ഉപയോഗിച്ച് തകർക്കുന്ന ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
ഡൈനാമിക് കാസിൽ ക്രാഷർ വെല്ലുവിളി പരിഹരിക്കുന്നതിന് പ്ലേഗ്രൗണ്ട് വിൻഡോയിലെ ടൈമർ ഉപയോഗിക്കേണ്ടതുണ്ട്.
വെല്ലുവിളി പൂർത്തിയാക്കാൻ ഈ ഘട്ടങ്ങൾ പാലിക്കുക:
- ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കുക അല്ലെങ്കിൽ ഈ യൂണിറ്റിലെ മുൻ പാഠങ്ങളിൽ നിന്ന് ഒരു പ്രോജക്റ്റ് ലോഡ് ചെയ്യുക. ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കുകയാണെങ്കിൽ, ആവശ്യപ്പെടുമ്പോൾഡൈനാമിക് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്തിരഞ്ഞെടുക്കുക.
- പ്രോജക്റ്റിന്റെ പേര് എന്ന് മാറ്റുക യൂണിറ്റ്9ചലഞ്ച്.
- പ്ലേഗ്രൗണ്ട് വിൻഡോ തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറക്കുക. ഡൈനാമിക് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട്തുറക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക.
- ഡൈനാമിക് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട് ന്റെ എല്ലാ കെട്ടിട ഭാഗങ്ങളും ഏറ്റവും കുറഞ്ഞ സമയത്തിനുള്ളിൽ നീക്കുന്നതിന് VR റോബോട്ടിനെ നയിക്കുന്നതിന് ആവശ്യമായ കമാൻഡുകൾ ചേർക്കുക. വിആർ റോബോട്ട് കളിസ്ഥലത്ത് നിന്ന് വീഴരുത്.
- അത് പ്രവർത്തിക്കുന്നുണ്ടോ എന്ന് പരിശോധിക്കാൻ പ്രോജക്റ്റ് ആരംഭിക്കുക. കളിസ്ഥലത്തിന്റെ ലേഔട്ട് പരിഗണിക്കാതെ തന്നെ അൽഗോരിതം പ്രവർത്തിക്കണം.
- വെല്ലുവിളി പൂർത്തിയാക്കാൻ എടുത്ത സമയം ഒരു കടലാസിൽ രേഖപ്പെടുത്തുക.
- ഏറ്റവും കുറഞ്ഞ സമയത്തിനുള്ളിൽ ഡൈനാമിക് കാസിൽ ക്രാഷർ ചലഞ്ച് വിജയകരമായി പൂർത്തിയാക്കുന്നത് വരെ വിആർ റോബോട്ട് പദ്ധതി പരിഷ്കരിച്ച് പ്രവർത്തിപ്പിക്കുന്നത് തുടരുക.
- ഡൈനാമിക് കാസിൽ ക്രാഷർ പ്ലേഗ്രൗണ്ട് ന്റെ എല്ലാ കെട്ടിട ഭാഗങ്ങളും റെക്കോർഡ് സമയത്ത് വിആർ റോബോട്ട് വിജയകരമായി പൊളിച്ചുമാറ്റിക്കഴിഞ്ഞാൽ പ്രോജക്റ്റ് സംരക്ഷിക്കുക.
അഭിനന്ദനങ്ങൾ! നിങ്ങൾ ഡൈനാമിക് കാസിൽ ക്രാഷർ ചലഞ്ച് വിജയകരമായി പൂർത്തിയാക്കി!
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.