
Lección 4: Dynamic Castle Crasher Challenge
¡En el Dynamic Castle Crasher Challenge, el robot de realidad virtual ahora debe eliminar TODAS las piezas de cada iteración del Dynamic Castle Crasher Playground, de la manera más rápida posible!
Resultado de aprendizaje
- Aplica la lógica de decisiones repetidas con múltiples sensores para resolver el Dynamic Castle Crasher Challenge.
Poniéndolo todo junto
Los algoritmos permiten al usuario crear proyectos más diversos y eficientes. Los algoritmos son secuencias precisas de instrucciones que pueden utilizar la selección y la iteración para instruir al robot de realidad virtual a utilizar la información de su entorno para ejecutar comportamientos.

Los algoritmos usan bucles para verificar continuamente los valores de los sensores y repetir comportamientos. La anidación de declaraciones condicionales dentro de bucles, como bucles infinitos while o bucles while con una condición no , le indicará al robot VR que verifique continuamente esas condiciones.
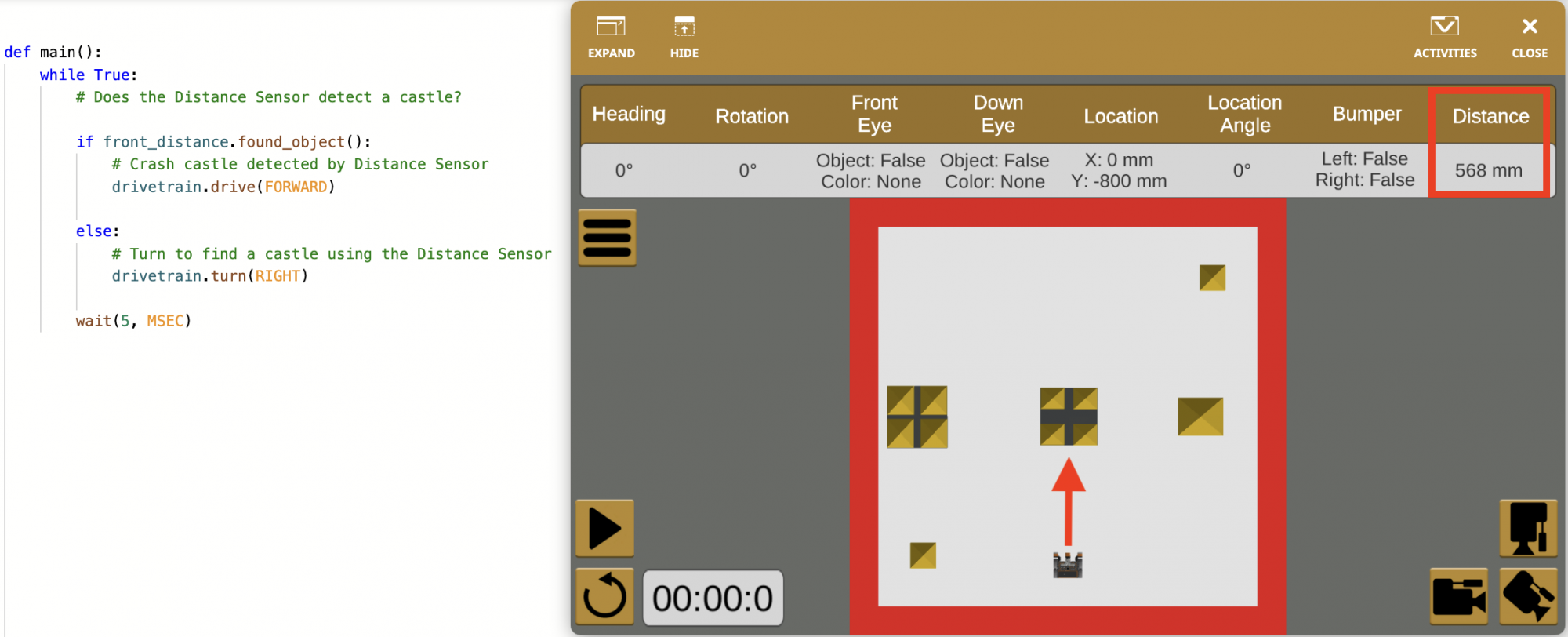
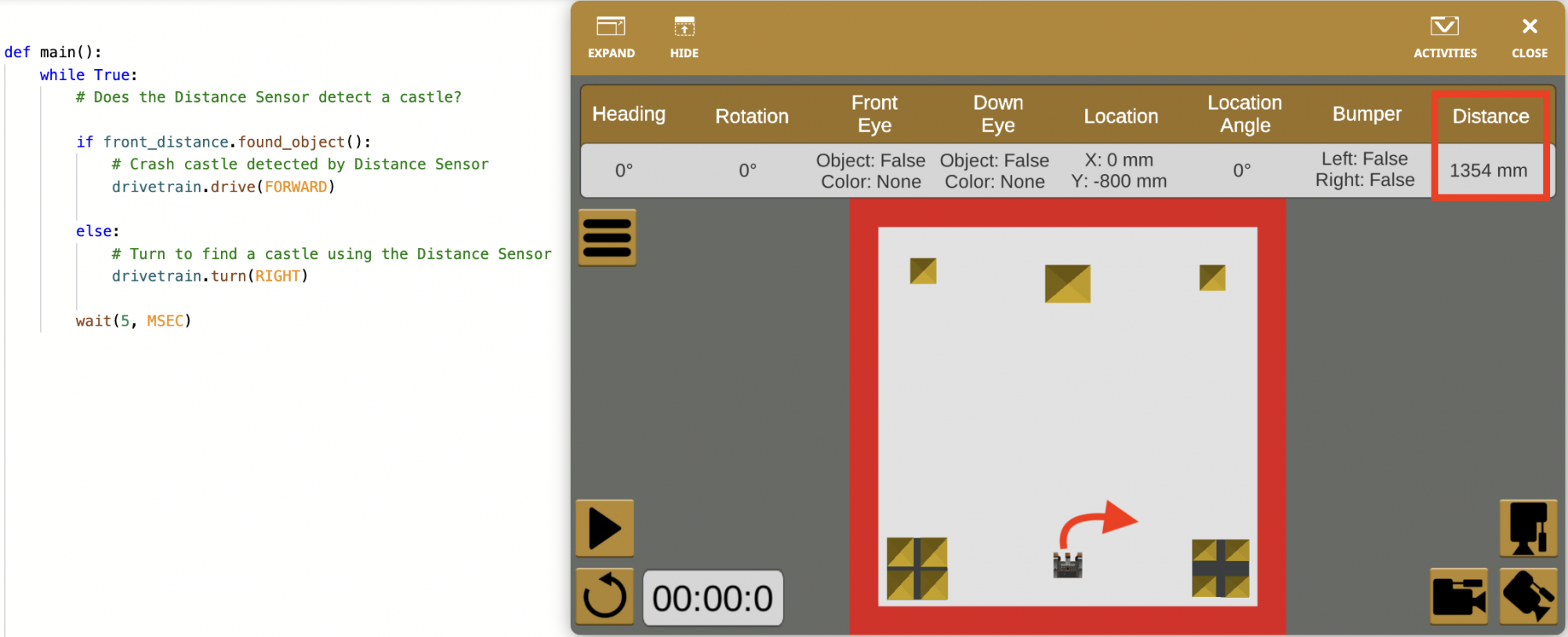
def main():
while True:
if distance.found_object ():
# Derriba el edificio encontrado usando el tren de transmisión del sensor de
distancia.drive(FORWARD)
else:
# Gira para encontrar un edificio usando el tren de transmisión del sensor
dedistancia.turn (RIGHT)
wait(5, MSEC)La selección se emplea mediante el uso de declaraciones condicionales, por ejemplo, para indicar al robot de realidad virtual que ejecute ciertos comportamientos, dependiendo de las condiciones informadas, como los valores del sensor.
El uso de sensores con bucles y selección permite que el robot VR interactúe con un entorno cambiante, como el Dynamic Castle Crasher Playground.
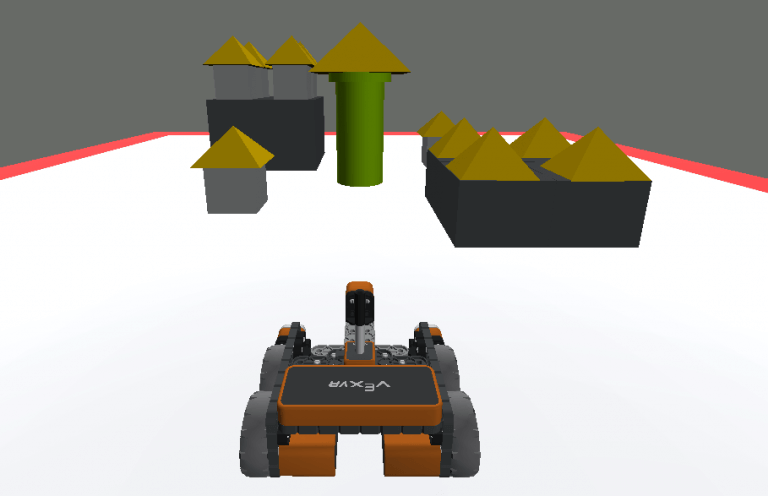
Dynamic Castle Crasher Challenge
En este desafío, crea un proyecto en el que el robot VR use un algoritmo para derribar todas las piezas del castillo del Dynamic Castle Crasher Playground, en el menor tiempo posible.
Resolver el desafío Dynamic Castle Crasher requiere el uso del temporizador en la Ventana del patio de recreo.
Sigue estos pasos para completar el desafío:
- Cree un nuevo proyecto o cargue un proyecto de lecciones anteriores en esta unidad. Si crea un nuevo proyecto, seleccione el Dynamic Castle Crasher Playground cuando se le solicite.
- Cambie el nombre del proyecto Unit9Challenge.
- Abra la ventana Patio de recreo si aún no está abierta. Asegúrate de que el Dynamic Castle Crasher Playground se abra.
- Añade los comandos necesarios para conducir el robot VR para empujar todas las piezas de construcción fuera del Dynamic Castle Crasher Playground en el menor tiempo posible. El robot de realidad virtual no debe caerse del patio de recreo.
- Inicie el proyecto para probar si funciona. El algoritmo debe funcionar independientemente del diseño del patio de recreo.
- Documente el tiempo que tardó en completar el desafío en un pedazo de papel.
- Continúe revisando y ejecutando el proyecto hasta que el robot de realidad virtual complete con éxito el Dynamic Castle Crasher Challenge en el menor tiempo posible.
- Guarda el proyecto una vez que el robot VR saque con éxito todas las piezas de construcción del Dynamic Castle Crasher Playground en un tiempo récord.
¡Felicidades! ¡Has completado con éxito el Dynamic Castle Crasher Challenge!
Preguntas
Seleccione un enlace a continuación para acceder al cuestionario de la lección.
Google Doc / .docx / .pdf