
레슨 4: 다이내믹 캐슬 크래셔 챌린지
Dynamic Castle Crasher 챌린지에서 VR 로봇은 이제 가능한 가장 빠른 방법으로 Dynamic Castle Crasher Playground의 각 반복에서 모든 개 조각 쓰러뜨려야 합니다!
학습 결과
- 여러 센서를 사용하여 반복적인 결정의 논리를 적용하여 Dynamic Castle Crasher Challenge를 해결하세요.
모두 합치기
알고리즘을 사용하면 사용자가 더 다양하고 효율적인 프로젝트를 만들 수 있습니다. 알고리즘은 선택과 반복을 사용하여 VR 로봇이 주변 환경에서 얻은 정보를 사용하여 행동을 실행하도록 지시할 수 있는 정확한 명령 시퀀스입니다.

알고리즘은 루프를 사용하여 센서 값을 지속적으로 확인하고 동작을 반복합니다. 무한 while 루프나 while루프와 같이not 조건을 갖는 루프 내부에 중첩된 조건문을 사용하면 VR 로봇이 해당 조건을 지속적으로 확인하도록 지시합니다.
def main():
while True:
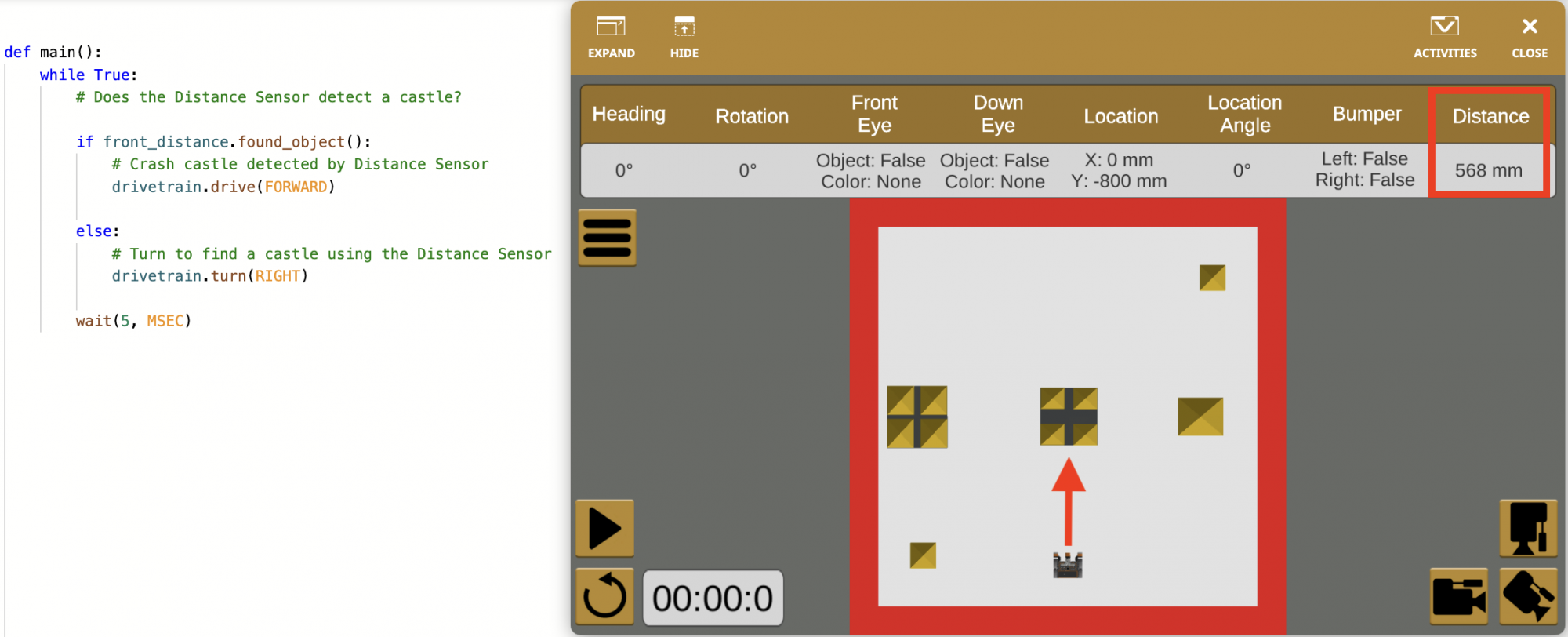
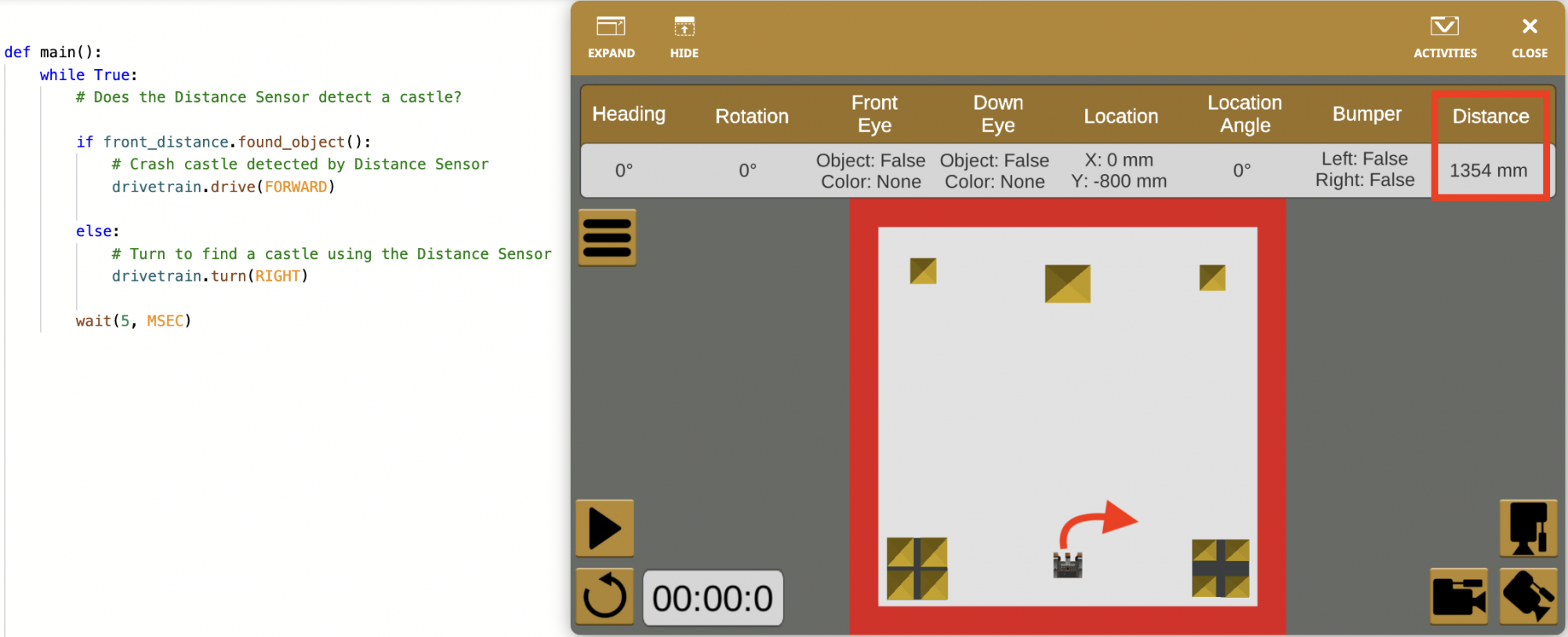
if distance.found_object():
# 거리 센서를 사용하여 찾은 건물을 쓰러뜨립니다.
drivetrain.drive(FORWARD)
else:
# 거리 센서를 사용하여 건물을 찾기 위해 방향을 바꿉니다.
drivetrain.turn(RIGHT)
wait(5, MSEC)선택은 센서 값과 같은 보고된 조건에 따라 VR 로봇이 특정 동작을 실행하도록 지시하기 위해 if else 과 같은 조건문을 사용하여 사용됩니다.
루프와 선택 기능이 있는 센서를 사용하면 VR 로봇이 Dynamic Castle Crasher Playground.와 같은 변화하는 환경과 상호 작용할 수 있습니다.
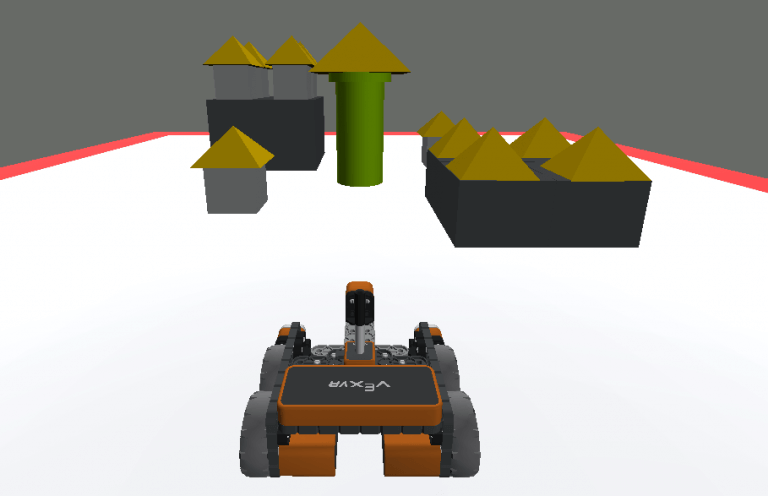
다이나믹 캐슬 크래셔 챌린지
이 챌린지에서는 VR 로봇이 알고리즘을 사용하여 가능한 가장 짧은 시간 안에 Dynamic Castle Crasher Playground에서 모든 성 조각을 떨어뜨리는 프로젝트를 만들어 보세요.
Dynamic Castle Crasher 챌린지를 풀려면 놀이터 창에 있는 타이머를 사용해야 합니다.
도전을 완료하려면 다음 단계를 따르세요.
- 이 단원의 이전 수업에서 새로운 프로젝트를 만들거나 프로젝트를 불러오세요. 새 프로젝트를 만드는 경우 메시지가 표시되면Dynamic Castle Crasher Playground선택하세요.
- 프로젝트 이름을 Unit9Challenge로 변경하세요.
- 놀이터 창이 아직 열려 있지 않으면 엽니다. Dynamic Castle Crasher Playground이 열리는지 확인하세요.
- VR 로봇이 최단 시간 내에 Dynamic Castle Crasher Playground 의 모든 건축 자재를 밀어내는 데 필요한 명령을 추가합니다. VR 로봇은 놀이터에서 떨어지면 안 됩니다.
- 프로젝트를 시작하여 제대로 작동하는지 테스트해 보세요. 이 알고리즘은 놀이터의 레이아웃과 관계없이 작동해야 합니다.
- 과제를 완료하는 데 걸린 시간을 종이에 기록하세요.
- VR 로봇이 최단 시간 내에 Dynamic Castle Crasher Challenge를 성공적으로 완료할 때까지 프로젝트를 계속 수정하고 실행합니다.
- VR 로봇이 기록적인 시간 내에 Dynamic Castle Crasher Playground 의 모든 건물 조각을 성공적으로 떨어뜨리면 프로젝트를 저장합니다.
축하해요! 다이내믹 캐슬 크래셔 챌린지를 성공적으로 완료했습니다!