
![]() مجموعة أدوات المعلم
- مخطط
النشاط
مجموعة أدوات المعلم
- مخطط
النشاط
-
سيعرف هذا الاستكشاف الطلاب على برمجة السلوكيات المتكررة باستخدام حلقات متكررة أو إلى الأبد.
-
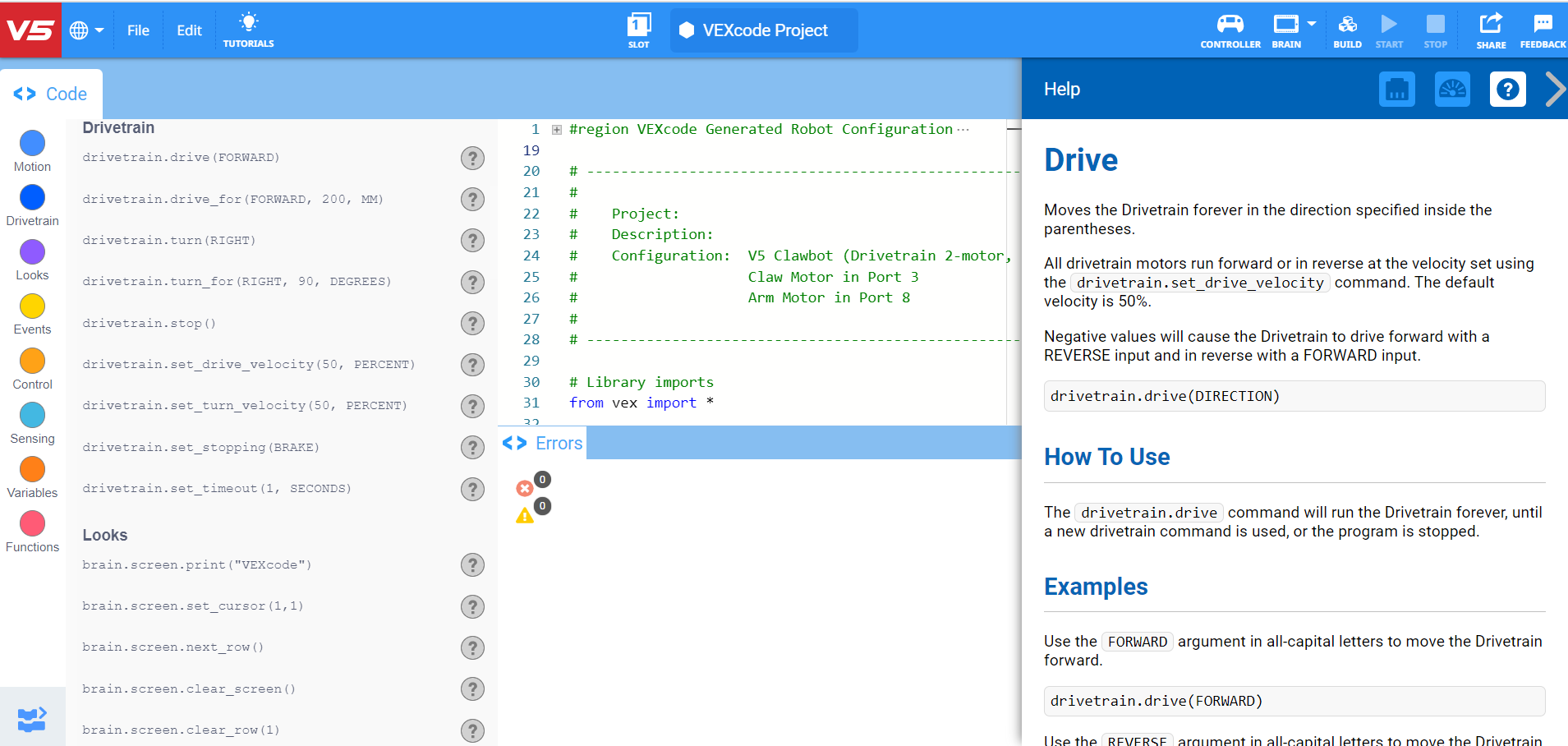
يتيح تعلم البرمجة باستخدام حلقات التكرار والأبد للطلاب توفير الوقت عند بناء مشروع يستخدم نفس الإجراءات المتكررة. لمزيد من المعلومات حول التعليمات المستخدمة في مشروع نصي، يرجى زيارة معلومات المساعدة.
جهاز Clawbot V5 جاهز للتحرك!
سيمنحك هذا الاستكشاف الأدوات اللازمة لتتمكن من البدء في إنشاء بعض المشاريع الرائعة التي تستخدم الحلقات.
- تعليمات VEXcode V5 Python التي سيتم استخدامها في هذا الاستكشاف:
- drivetrain.drive_for(للأمام، 300، مم)
- drivetrain.turn_for(يمين، 90، درجة)
- claw_motor.spin_for(عكس، 70، درجة)
- arm_motor.spin_for(للأمام، 360 درجة)
- bUMPER_b.pressing()
- بينما صحيح:
- لـ REPEAT_COUNT في النطاق(4):
- انتظر(5 ثوانٍ)
يمكنك استخدام معلومات التعليمات داخل VEXcode V5 للتعرف على أوامر Python الفردية.
![]() نصائح للمعلم
نصائح للمعلم
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode V5، فيمكنه قراءة مجموعة متنوعة من المقالات في مكتبة VEX.

![]() نصائح المعلم
-
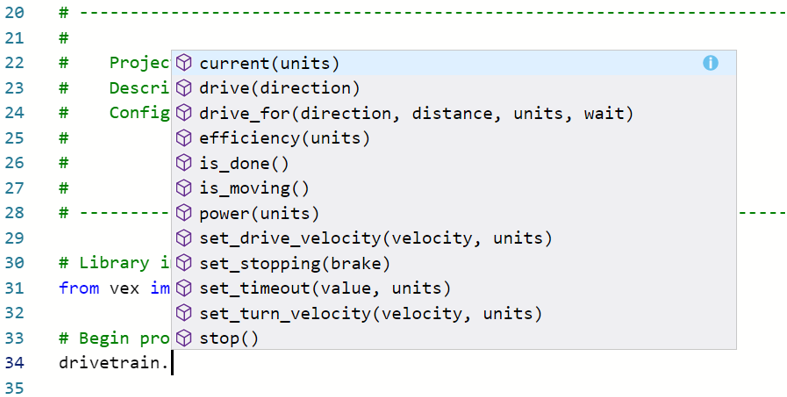
استخدام الإكمال التلقائي
نصائح المعلم
-
استخدام الإكمال التلقائي
الإكمال التلقائي هي ميزة في VEXcode V5 تتنبأ ببقية الأمر الذي تكتبه. نظرًا لأن الطلاب يعملون في VEXcode V5، شجعهم على استخدام ميزة الإكمال التلقائي للمساعدة في بناء جملة بايثون. قد تلاحظ وظيفة الإكمال التلقائي عندما تبدأ في كتابة التعليمات. استخدم مفتاحي "أعلى" و "أسفل" لتحديد الاسم الذي تريده، ثم اضغط على "Tab" أو (Enter/Return) على لوحة المفاتيح لإجراء التحديد. لمزيد من المعلومات حول استخدام الإكمال التلقائي، راجع مقالة بايثون.
تأكد من تنزيل الأجهزة المطلوبة، والكمبيوتر المحمول الهندسي، و VEXcode V5 وجاهزيته.
| الكمية | المواد اللازمة |
|---|---|
| 1 |
مجموعة VEX V5 Classroom Starter (مع برنامج ثابت محدث) |
| 1 |
VEXcode V5 (أحدث إصدار، ويندوز، ماك أو إس) |
| 1 |
دفتر ملاحظات هندسي |
| 1 |
نموذج Clawbot (مجموعة نقل الحركة بمحركين، بدون جيروسكوب) مثال على المشروع |
الخطوة 1: لنبدأ البرمجة باستخدام الحلقات
- قبل أن تبدأ مشروعك، حدد مشروع القالب الصحيح. يحتوي مشروع نموذج Clawbot (مجموعة نقل الحركة بمحركين، بدون جيروسكوب) على التكوين الحركي لـ Clawbot. إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.
-
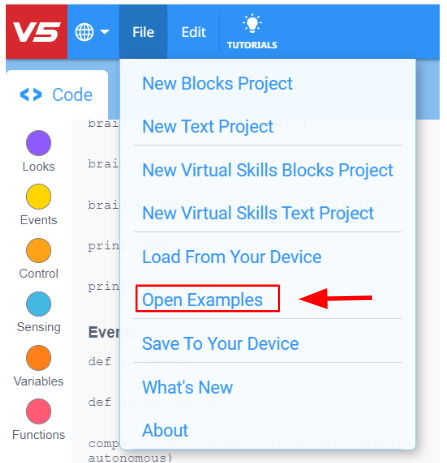
حدد ملفًا وافتح أمثلة.
-
قم بالتمرير عبر أمثلة المشاريع المختلفة. توضح هذه المشاريع مجموعة متنوعة من الإجراءات التي يمكن أن يقوم بها Clawbot. حدد وافتح نموذج Clawbot (Drivetrain 2 - motor، No Gyro) كمثال للمشروع.

-
قم بتسمية المشروع RepeatingActions.

-
اكتب الرمز التالي:
# واردات المكتبة من استيراد vex * # ابدأ رمز المشروع # يدور للأمام 300 مم 90 درجة لمدة 4 تكرارات للتكرار في النطاق(4): drivetrain.drive_for ( للأمام، 300، مم) drivetrain.turn_for (لليمين، 90، درجة) انتظر(5، ثانية)
انظر إلى المشروع ثم قم بما يلي في دفتر ملاحظاتك الهندسية.
-
تنبأ بما سيقوم به Clawbot في المشروع. اشرح أكثر من حقيقة أن المشروع يتكرر.
ما الذي يكرره ؟ ماذا يفعل المخلب ؟
- اكتب تنبؤك، ولكن لا تقسم المشروع القصير إلى أكثر من جزأين.
![]() صندوق أدوات المعلم
-
الإجابات
صندوق أدوات المعلم
-
الإجابات
-
سيحتوي هذا المشروع على الروبوت: القيادة للأمام لمسافة 300 ملليمتر ، والانعطاف يمينًا 90 درجة، ثم الانتظار لمدة 5 ثوانٍ 4 مرات لإكمال المربع. بدلاً من استخدام نفس التعليمات الثلاثة 4 مرات، تقلل التعليمات المتكررة الكمية إلى مرة واحدة فقط. تكرر التعليمات المتكررة إجراءات القيادة للأمام ثم الانعطاف.
-
قد يكون التنبؤ ببساطة "يتحرك المخلب في مربع". ستكون هذه طريقة موجزة لالتقاط الحركات المتكررة لـ Clawbot مع عدم وجود أي سياق.
يمكن الحفاظ على دفاتر الملاحظات الهندسية للطلاب وتسجيلها بشكل فردي أو كفريق واحد. توفر الروابط السابقة نموذج تقييم مختلف لكل نهج. عندما يتم تضمين نموذج تقييم في التخطيط التعليمي، من الجيد شرح نموذج التقييم أو على الأقل إعطاء نسخ للطلاب قبل بدء النشاط.
-
احفظ مشروع الإجراءات المتكررة وقم بتنزيله وتشغيله.

- تحقق من شروحاتك للمشروع في دفترك الهندسي وأضف ملاحظات لتصحيحها حسب الحاجة.
الخطوة 2: تشغيل المشروع ومراقبة الروبوت
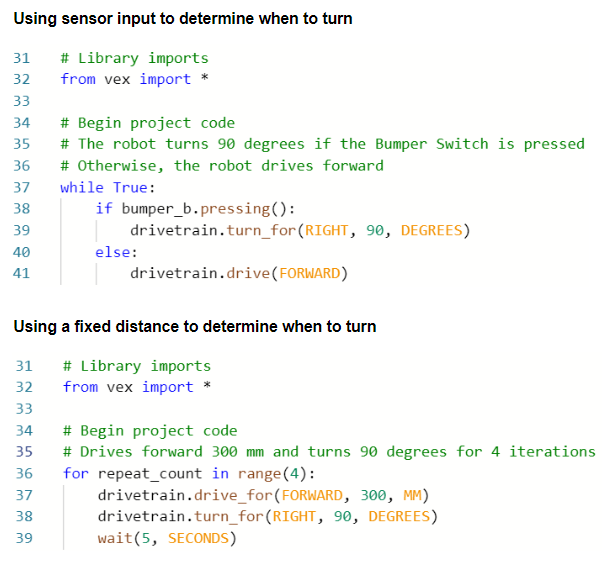
انظر إلى مشروع الإجراءات المتكررة (المشروع الثاني) مرة أخرى. سيقوم هذا المشروع بتكرار التقدم
ثم تحويل السلوك أربع مرات. يتم استخدام بنية الحلقة "المتكررة"
(باستخدام حلقة for) عندما تريد استخدام مجموعة من السلوكيات لعدد معين من
المرات.
إذا تم استبدال بنية التكرار ببنية حلقة الوقت، فسيقوم الروبوت
بتكرار سلوكيات التقدم ثم الدوران "بينما" الشرط صحيح. يمكنك أيضًا ضبط الشرط على "true"
لاستمرار الحلقة إلى الأبد.
في المشروع الأول، يتم استخدام مدخلات
المستشعر لتحديد وقت بدء الدوران. يستخدم المشروع الموجود على اليمين مسافة مجموعة نقل حركة
ثابتة لتحديد وقت بدء الدوران. من
أجل التحقق باستمرار من دخل المستشعر، يتم استخدام
عبارة if else معًا لفترة من الوقت. في المشروع على اليسار، سوف يتحول
الروبوت إلى اليمين عند الضغط على مستشعر "المصد_ b"، وإلا فإن الروبوت سوف يتحرك إلى
الأمام إلى الأبد إذا لم يتم الضغط على مستشعر "المصد_ b". للتحقق باستمرار من قيمة مستشعر
المصد b، تكون عبارة if في غضون حلقة قصيرة.
المشروع الأول
هو حالة استخدام عملية لهيكل يتكرر إلى الأبد –
باستخدام حلقات WHILE وعبارات IF معًا. تخيل مكنسة
ذاتية القيادة تستمر في القيادة للأمام حتى تصطدم بجدار أو جسم، ثم تستدير قبل الاستمرار في
القيادة.
![]() قم بتوسيع نطاق تعلمك
قم بتوسيع نطاق تعلمك
لمزيد من الاستكشاف لكيفية استخدام الحلقات مع الشروط، اطلب من الطلاب بناء مشروع مكنسة أرضية في VEXcode V5.
- ابدأ بجعل الطلاب يركبون مفاتيح المصد ويسلكونها.
-
اطلب من الطلاب فتح نموذج Clawbot (Drivetrain 2 - motor، No Gyro) كمثال على المشروع.

- اطلب من الطلاب تكوين مفتاح المصد ثلاثي الأسلاك فيVEXcode V5، وحدد الجهاز
ثلاثي الأسلاك الذي تستخدمه للمصد، وحدد المنفذ إلى B.
-
اطلب من الطلاب تسمية المشروع باسم مكنسة الأرضية.

-
اطلب من الطلاب بناء المشروع التالي.
# Library imports from vex import * import random # Begin project code while True: while (not bumper_b.pressing ()): drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.stop ()# تُرجع طريقة random.randomint () رقمًا صحيحًا عشوائيًا بين النطاق المحدد #تمرير القيم الدنيا والقصوى للنطاق إلى المعلمات drivetrain.turn_for (RIGHT, (90 + random.randint (0, 90)),DEGREES) wait(5, MSEC)
إذا احتاج الطلاب إلى المساعدة في أي من التعليمات، فقم بإحالتهم
إلى معلومات المساعدة.
اطلب
من الطلاب تنزيل
المشروع وتشغيله لمراقبة كيفية تحرك الروبوت. بعد ذلك، ابدأ مناقشة في
الفصل واطلب من الطلاب شرح سبب استخدام بنية الأبد بدلاً
من بنية التكرار. يجب على
الطلاب ملاحظة أنه يتم
استخدام بنية دائمة لأن هذا المشروع يتحقق باستمرار لمعرفة ما إذا كان يتم
الضغط على مفتاح المصد.
الخطوة 3: تحدي الحلقات المربعة!

- اجعل محرك Clawbot الخاص بك في مربع.
- قبل كل منعطف، يجب فتح المخلب وإغلاقه، ويجب رفع الذراع وخفضه.
- لا يمكن لـ Clawbot القيادة على جانب من المربع أكثر من مرة.
- يمكنك استخدام مشروع RepeatingActions من الأعلى كنقطة بداية ولكن احفظه كـ SquaredLoops قبل إجراء أي تغييرات.

في دفترك الهندسي، خطط لما يلي:
- خطط لحلك وتنبأ بما ستفعله كل تعليمات في مشروعك مع Clawbot.
- قم بتنزيل وتشغيل مشروعك لاختباره قبل تقديمه.
- قم بإجراء تغييرات على المشروع حسب الحاجة وقم بتدوين الملاحظات حول ما تم تغييره أثناء الاختبار.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
فيما يلي حل محتمل لتحدي الحلقات المربعة:
# واردات المكتبة
من استيراد vex *
# ابدأ رمز المشروع
للتكرار في النطاق(4): drivetrain.drive_for (للأمام
، 300، مم) claw_motor.spin_for (للخلف
، 70، درجة) arm_motor.spin_for (للأمام
، 360، درجة) claw_motor.spin_for (
للأمام، 70، درجة) arm_motor.spin_for (
للخلف، 360، درجة) drivetrain.turn_for (
لليمين، 90، درجة)
انتظر(5، مللي ثانية)يمكنك تزويد الطلاب بنموذج تقييم برمجي لتسجيل مشاريعهم. يمكن
الحفاظ على دفاتر الملاحظات الهندسية
للطلاب وتسجيلها بشكل فردي أو كفريق واحد.