
برمجة المخلب - بايثون
![]() صندوق أدوات المعلم
-
مخطط النشاط
صندوق أدوات المعلم
-
مخطط النشاط
-
سوف يقدم هذا الاستكشاف للطلاب البرمجة الأساسية لمحرك مخلب V5 Clawbot.
-
يتيح تعلم برمجة محرك Claw للطلاب التحكم بشكل صحيح في كيفية إمساك V5 Clawbot بالأشياء في بيئته.
روبوت V5 Clawbot جاهز للإمساك به!
سيسمح لك هذا الاستكشاف بالبدء في إنشاء بعض المشاريع الرائعة التي تستخدم مخلب V5 Clawbot للإمساك بالأشياء.
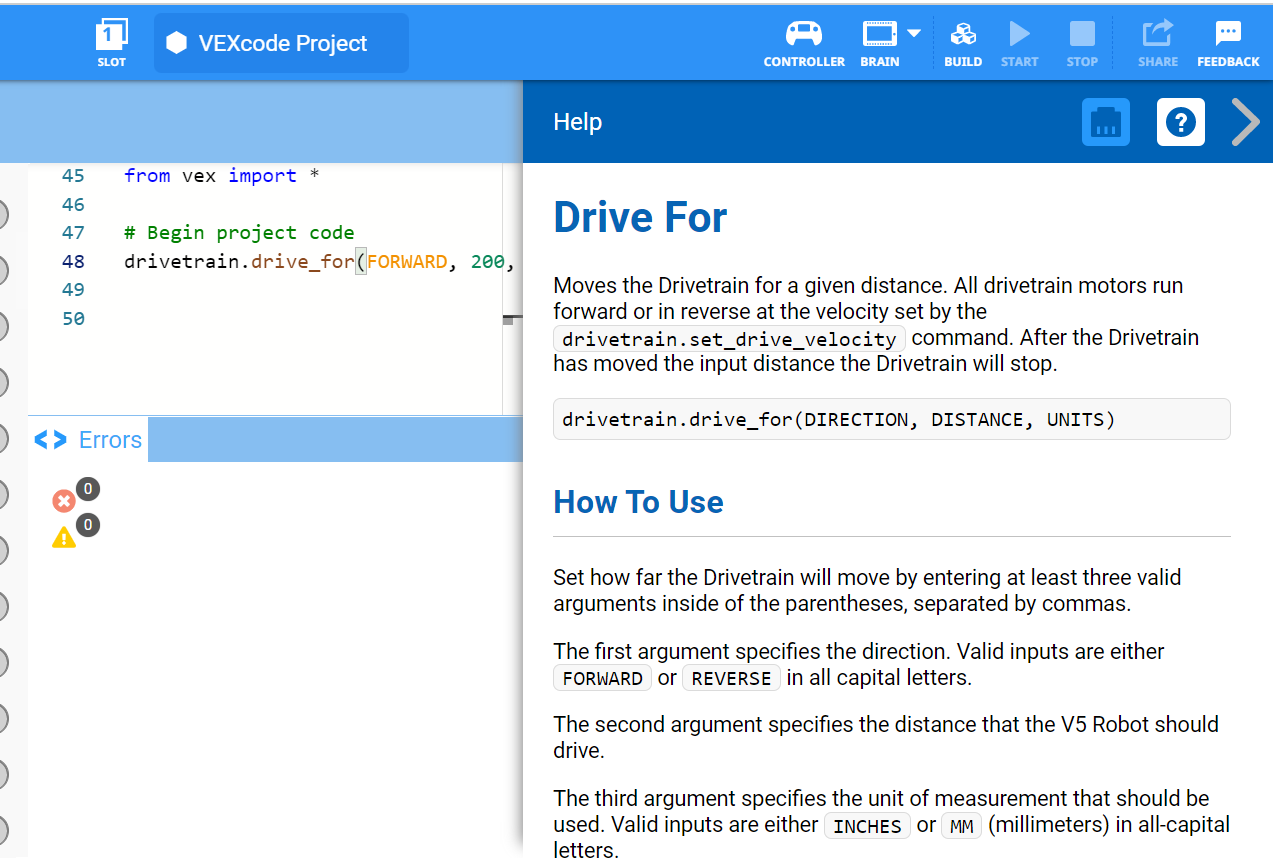
- تتضمن أوامر VEXcode V5 Python التي سيتم استخدامها في هذا الاستكشاف ما يلي:
- محرك المخلب.set_position(0, درجات)
- محرك المخلب.spin_for(إلى الأمام، 90 درجة)
- محرك المخلب.set_timeout(2، ثانية)
-
لمعرفة المزيد من المعلومات حول الأمر، حدد رمز علامة الاستفهام بجوار الأمر لرؤية المزيد من المعلومات.
- تأكد من أن لديك الأجهزة المطلوبة ودفتر الهندسة الخاص بك وبرنامج VEXcode V5 الذي تم تنزيله وأنك جاهز.
| كمية | المواد المطلوبة |
|---|---|
| 1 |
مجموعة أدوات بدء تشغيل VEX V5 Classroom (مع البرامج الثابتة المحدثة) |
| 1 |
كود VEX الإصدار 5 |
| 1 |
دفتر الهندسة |
| 1 |
مشروع نموذجي لـ Clawbot وAdvanced TrainingBot (Drivetrain 2-motor, No Gyro) |
| 1 |
علبة الألمنيوم |
![]() نصائح للمعلم
نصائح للمعلم
قم بعمل نموذج لكل خطوة من خطوات استكشاف الأخطاء وإصلاحها للطلاب.
الخطوة 2: بدء مشروع جديد
قبل أن تبدأ مشروعك، حدد قالب المشروع الصحيح. يحتوي مشروع المثال Clawbot وAdvanced TrainingBot (Drivetrain 2-motor, No Gyro) على تكوين محرك Clawbot. إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.
أكمل الخطوات التالية:
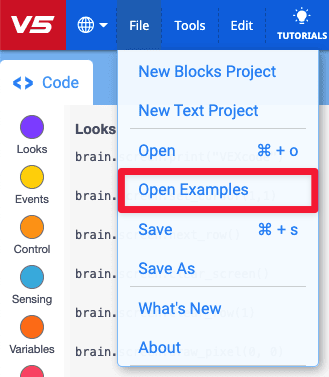
- افتح قائمة الملف.
- إختر مفتوح أمثلة.
- قم بتحديد وفتح مشروع المثال Clawbot وAdvanced TrainingBot (Drivetrain 2-motor, No Gyro).
- نظرًا لأننا سنقوم بالبرمجة للتحكم في المخلب، قم بإعادة تسمية مشروعك ClawControl.
- احفظ مشروعك.
- تأكد من أن اسم المشروع ClawControl موجود الآن في النافذة الموجودة في منتصف شريط الأدوات.

![]() نصائح للمعلم
نصائح للمعلم
- نظرًا لأن هذا نشاط تمهيدي في البرمجة، فيجب على المعلم أن يقوم بعمل نموذج للخطوات، ثم يطلب من الطلاب إكمال نفس الإجراءات. يجب على المعلم بعد ذلك مراقبة الطلاب للتأكد من أنهم يتبعون الخطوات بشكل صحيح.
- تأكد من أن الطلاب قد اختاروا فتح الأمثلة من قائمة الملف.
- تأكد من أن الطلاب قد اختاروا مشروع المثال Clawbot وAdvanced TrainingBot (Drivetrain 2-motor, No Gyro). يمكنك الإشارة للطلاب إلى وجود العديد من الاختيارات التي يمكنهم الاختيار من بينها في صفحة أمثلة. مع قيامهم ببناء واستخدام الروبوتات الأخرى، سيكون لديهم فرصة لاستخدام قوالب مختلفة.
- يمكنك أن تطلب من الطلاب إضافة الأحرف الأولى من أسمائهم أو اسم مجموعتهم إلى اسم المشروع. سيساعدك هذا على التمييز بين المشاريع إذا طلبت من الطلاب تقديمها.
![]() صندوق أدوات المعلم
-
توقف وناقش
صندوق أدوات المعلم
-
توقف وناقش
هذه نقطة جيدة للتوقف مؤقتًا وجعل مجموعات الطلاب تراجع الخطوات التي تم إكمالها للتو عند بدء مشروع جديد في VEXcode V5.
الخطوة 3: برمجة مخلب V5 للفتح
سنبدأ الآن ببرمجة المخلب ليُفتح!
# تستورد المكتبة
من vex import *
# ابدأ كود المشروع
claw_motor.set_position(0, DEGREES)- اكتب الأمر claw_motor.set_position() كما هو موضح أعلاه في منطقة البرمجة لتعيين موضع البداية للمخلب.
claw_motor.set_position(0, درجات)
claw_motor.set_timeout(2, ثوان)- أضف الأمر claw_motor.set_timeout() كما هو موضح أعلاه.
- لاحظ أن هذه التعليمات تظهر قبل الأمر claw_motor.spin_for() . غرضه هو تحديد المدة التي يمكن لمحرك Claw أن يعمل فيها وإيقافه بعد ذلك الوقت. لذا، حتى لو لم يتحرك المحرك بمقدار 60 درجة كاملة، فإن المشروع يوقف محرك Claw بعد مرور ثانيتين.
claw_motor.set_position(0, DEGREES)
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(REVERSE, 60, DEGREES)- اكتب الأمر claw_motor.spin_for() كما هو موضح أعلاه لفتح المخلب بمقدار 60 درجة.

- قم بتحديد الفتحة التي سيتم تنزيل المشروع إليها على V5 Robot Brain عن طريق تحديد الرمز الموجود في المربع 1 لفتح جميع فتحات المشروع المتاحة وتحديد الفتحة المطلوبة.
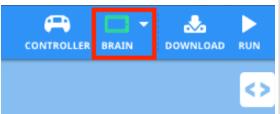
- قم بتوصيل الروبوت بالكمبيوتر أو الجهاز اللوحي الخاص بك. يتحول لون أيقونة الدماغ في شريط الأدوات إلى اللون الأخضر بعد إجراء اتصال ناجح.
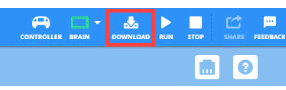
- انقر على أيقونة التنزيل الموجودة بجوار أيقونة معلومات الجهاز لتنزيل المشروع على V5 Robot Brain.

- تأكد من أن مشروع ClawControl تم تنزيله إلى الدماغ في الفتحة التي اخترتها.
![]() صندوق أدوات المعلم
-
النموذج الأول
صندوق أدوات المعلم
-
النموذج الأول
نموذج تنفيذ المشروع أمام الفصل قبل أن يحاول جميع الطلاب تنفيذه مرة واحدة. اجمع الطلاب في منطقة واحدة وقم بوضع Clawbot في مكان يمكن للجميع رؤية مخلبه. إذا كنت تخطط لاستعراض ذلك أكثر من مرة، فيمكنك دفع المخلب بلطف لإغلاقه بين الجولات.
أخبر الطلاب أنه دورهم الآن لتنفيذ مشاريعهم.
- قمالمشروع على عن طريق التأكد من تحديد المشروع ثم اضغط على زر التشغيل. أهنئك على إنشاء مشروعك الأول لتحريك المخلب!
الخطوة 4: جرب هذا: أغلق مخلب V5
الآن بعد أن قمت ببرمجة المخلب للفتح، فسوف تقوم الآن ببرمجته للإغلاق.
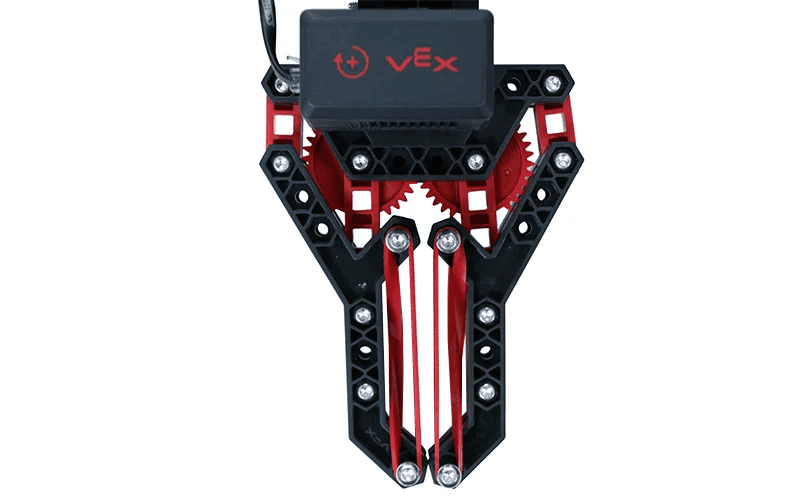
![]() الآن بعد أن أصبح بإمكانك فتح المخلب، فسوف ترغب في إغلاقه أيضًا.
الآن بعد أن أصبح بإمكانك فتح المخلب، فسوف ترغب في إغلاقه أيضًا.
- ارجع إلى مشروع ClawControl وأضف أمرًا إضافيًا claw_motor.spin_for() لإغلاق دوران محرك Claw Motor بمقدار 30 درجة. ينبغي أن يغلق المخلب عند منتصف المسافة لأنه انفتح في الأصل بزاوية 60 درجة.
- اختبر مشروعك المنقح للتأكد من أن المخلب مفتوح بزاوية 60 درجة ثم مغلق بزاوية 30 درجة عن طريق تنزيل مشروع ClawControl وتشغيله.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
في السابق، تم فتح المخلب بزاوية 60 درجة. تم تضمين تعليمات ضبط مهلة زمنية للمحرك في هذا المشروع لأنه من المهم ضبط مهلة زمنية عند تشغيل معالج قد تكون حركته مقيدة بطريقة ما. يؤدي ضبط مهلة زمنية إلى منع التآكل غير الضروري للمحرك.
الحل التالي هو هذه الخطوة:
# ابدأ كود المشروع
claw_motor.set_position(0, DEGREES)
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(REVERSE, 60, DEGREES)
claw_motor.spin_for(FORWARD, 30, DEGREES)الخطوة 5: جرب هذا: تسلسل الحركات المتعددة
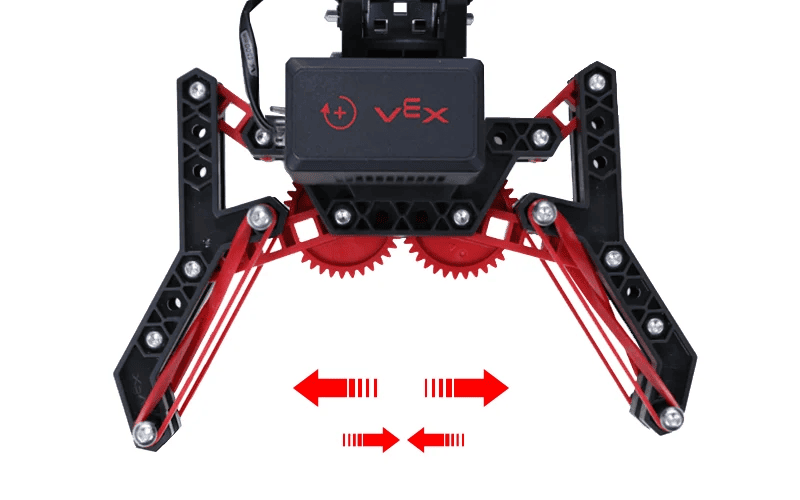
![]() ليس كل ما تلتقطه بالمخلب سيكون بنفس الحجم. حاول فتح المخلب إلى أوضاع مختلفة على طول نطاق الحركة.
ليس كل ما تلتقطه بالمخلب سيكون بنفس الحجم. حاول فتح المخلب إلى أوضاع مختلفة على طول نطاق الحركة.
- قم بتدوير المحرك من أجل:
- مفتوح بزاوية 70 درجة
- إغلاق عند 20 درجة
- مفتوح لـ 10 درجات
- إغلاق عند 30 درجة
- إغلاق عند 25 درجة
- إذا بدأ محرك المخلب عند 0 درجة، فكم درجة يكون محرك المخلب مفتوحًا في نهاية المشروع؟
- ابدأ بمحرك المخلب مغلقًا.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
الحل لهذه الخطوة موضح أدناه.
يظل محرك المخلب مفتوحًا عند 5 درجات في نهاية المشروع: 70 - 20 = 50 --> 50 + 10 = 60 --> 60 - 30 = 30 --> 30 - 25 = 5 درجات.
# ابدأ كود المشروع
# خذ الموضع الحالي للمخلب كصفر
claw_motor.set_position(0, DEGREES)
# اضبط مهلة المخلب
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(REVERSE, 70, DEGREES)
claw_motor.spin_for(FORWARD, 20, DEGREES)
claw_motor.spin_for(REVERSE, 10, DEGREES)
claw_motor.spin_for(FORWARD, 30, DEGREES)
claw_motor.spin_for(FORWARD, 25, DEGREES)الخطوة 6: إكمال تحدي القفل المحكم

![]() تحدي القفل المحكم
تحدي القفل المحكم
- قم ببرمجة Clawbot لإغلاق المخلب بشكل آمن على علبة ألومنيوم فارغة سعة 12 أونصة دون سحق الجوانب.
- اطلب من Clawbot أن يمسك بالعلبة أثناء رفع وخفض ذراعه بزاوية 45 درجة.
- يجب بعد ذلك على Clawbot تحرير العلبة والابتعاد عنها.
- ابدأ التحدي بمخلب مفتوح وعلبة فارغة بداخله.
![]() نصائح للمعلم
نصائح للمعلم
- اطلب من الطلاب أن يبدأوا التحدي بمخلب مفتوح وعلبة فارغة بداخله.
- إذا تعرضت العلبة للسحق أو السقوط من المخلب، فيجب إعادة بدء التحدي بعد تعديل المشروع.
![]() صندوق أدوات المعلم
-
الحل
صندوق أدوات المعلم
-
الحل
فيما يلي مثال على الحل:
# ابدأ كود المشروع
# خذ الموضع الحالي للمخلب على أنه صفر
claw_motor.set_position(0, DEGREES)
# اضبط مهلة المخلب
claw_motor.set_timeout(2, SECONDS)
claw_motor.spin_for(FORWARD, 170, DEGREES)
arm_motor.spin_for(FORWARD, 45, DEGREES)
arm_motor.spin_for(REVERSE, 45, DEGREES)
claw_motor.spin_for(REVERSE, 150, DEGREES)
drivetrain.drive_for(REVERSE, 150, MM)- يقوم المشروع بتحديد مهلة زمنية، ثم يغلق المخلب حول العلبة، ثم يرفع العلبة ويخفضها، ثم يطلقها، ثم يتراجع إلى الخلف.
-
معايير البرمجة
(مستند جوجل / .docx / .pdf )