
Programmierung der Klaue - Python
![]() Lehrer-Toolbox
-
Aktivitätsübersicht
Lehrer-Toolbox
-
Aktivitätsübersicht
-
Diese Erkundung führt die Schüler in die grundlegende Programmierung des Klauenmotors des V5 Clawbot ein.
-
Durch das Erlernen der Programmierung des Klauenmotors können die Schüler richtig steuern, wie der V5 Clawbot Objekte in seiner Umgebung greift.
Der V5 Clawbot ist bereit zum Greifen!
Durch diese Erkundung können Sie mit der Erstellung einiger cooler Projekte beginnen, bei denen die Klaue des V5 Clawbot zum Greifen von Objekten verwendet wird.
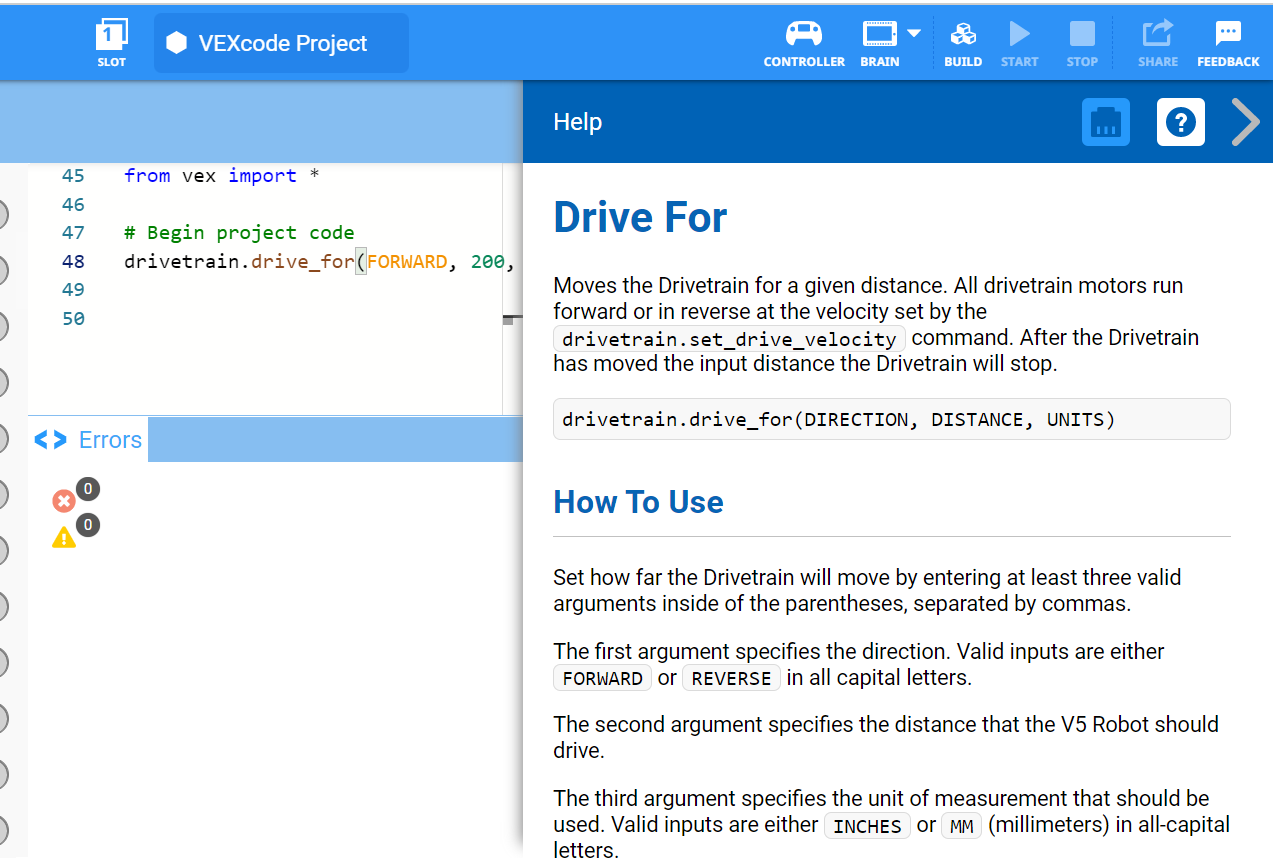
- Zu den VEXcode V5 Python-Befehlen, die bei dieser Untersuchung verwendet werden,
gehören:
- claw_motor.set_position(0, GRAD)
- claw_motor.spin_for(VORWÄRTS, 90, GRAD)
- claw_motor.set_timeout(2, SEKUNDEN)
-
Um weitere Informationen über den Befehl zu erhalten, wählen Sie das Fragezeichensymbol neben einem Befehl aus, um weitere Informationen anzuzeigen.
- Stellen Sie sicher, dass Sie über die erforderliche Hardware, Ihr technisches Notizbuch und VEXcode V5 verfügen und bereit sind.
| Menge | Benötigte Materialien |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (mit aktueller Firmware) |
| 1 |
VEXcode V5 |
| 1 |
Technisches Notizbuch |
| 1 |
Beispielprojekt Clawbot und Advanced TrainingBot (Antriebsstrang 2-Motor, kein Gyro) |
| 1 |
Aluminiumdose |
Schritt 1: Vorbereitung der Erkundung
Haben Sie alle diese Gegenstände bereit, bevor Sie mit der Aktivität beginnen? Überprüfen Sie jedes der folgenden Elemente:
-
Sind die Motoren an die richtigen Anschlüsse angeschlossen?
-
Sind die Smart Cables bei allen Motoren vollständig eingesteckt?
-
Ist das Gehirn eingeschaltet?
-
Ist der Akku geladen?
![]() Tipps für Lehrer
Tipps für Lehrer
Machen Sie den Schülern jeden Schritt zur Fehlerbehebung exemplarisch vor.
Schritt 2: Ein neues Projekt starten
Wählen Sie das richtige Vorlagenprojekt aus, bevor Sie mit Ihrem Projekt beginnen. Das Beispielprojekt „Clawbot und Advanced TrainingBot (Antriebsstrang 2 Motoren, kein Gyro)“ enthält die Motorkonfiguration des Clawbot. Wenn die Vorlage nicht verwendet wird, führt Ihr Roboter das Projekt nicht korrekt aus.
Führen Sie die folgenden Schritte aus:
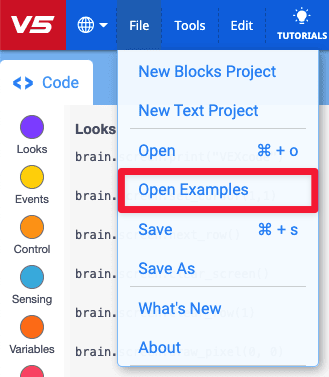
- Öffnen Sie das Menü Datei.
- Auswählen Öffnen Beispiele.
- Wählen und öffnen Sie das Beispielprojekt „Clawbot“ und „Advanced TrainingBot“ (Antriebsstrang mit 2 Motoren, kein Gyro).
- Da wir die Steuerung der Klaue programmieren werden, benennen Sie Ihr Projekt ClawControlum.
- Speichern Sie Ihr Projekt.
- Überprüfen Sie, ob der Projektname ClawControl jetzt im Fenster in der Mitte der Symbolleiste angezeigt wird.

![]() Tipps für Lehrer
Tipps für Lehrer
- Da es sich hierbei um eine Aktivität für Anfänger im Programmieren handelt, sollte der Lehrer die Schritte vorführen und die Schüler anschließend bitten, dieselben Aktionen auszuführen. Der Lehrer sollte die Schüler dann überwachen, um sicherzustellen, dass sie die Schritte richtig ausführen.
- Stellen Sie sicher, dass die Studierenden im Menü „Datei“ die Option „Beispiele öffnen“ ausgewählt haben.
- Stellen Sie sicher, dass die Schüler die Beispielprojekte „Clawbot“ und „Advanced TrainingBot“ (Antriebsstrang mit 2 Motoren, kein Gyro) ausgewählt haben. Sie können die Schüler darauf hinweisen, dass auf der Seite „ Beispiele mehrere Auswahlmöglichkeiten zur Verfügung stehen. Wenn sie andere Roboter bauen und verwenden, haben sie die Möglichkeit, unterschiedliche Vorlagen zu verwenden.
- Sie können die Studierenden bitten, dem Projektnamen ihre Initialen oder den Namen ihrer Gruppe hinzuzufügen. Dies trägt zur Differenzierung der Projekte bei, wenn Sie die Studierenden auffordern, diese einzureichen.
![]() Lehrer-Toolbox
-
Stoppen und diskutieren
Lehrer-Toolbox
-
Stoppen und diskutieren
Dies ist ein guter Punkt, um eine Pause einzulegen und die Studentengruppen die gerade abgeschlossenen Schritte zum Starten eines neuen Projekts in VEXcode V5 noch einmal durchgehen zu lassen.
Schritt 3: Programmieren Sie die V5-Klaue zum Öffnen
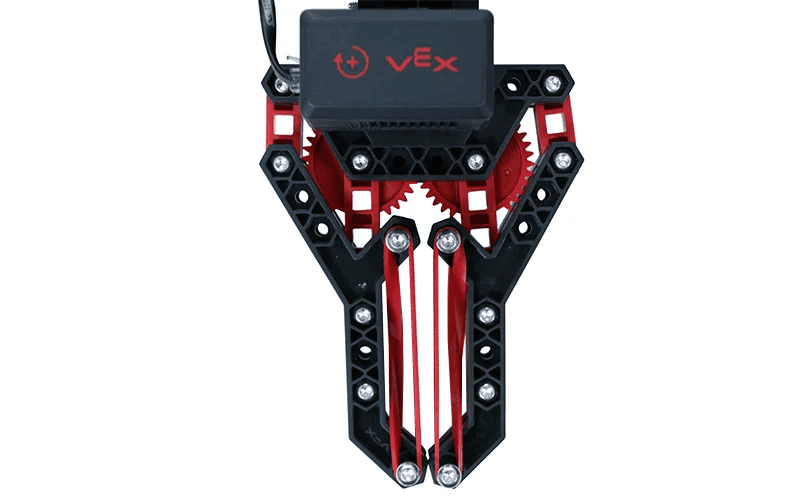
Wir beginnen jetzt mit der Programmierung des Öffnens der Klaue!
# Bibliothek importiert
von Vex-Import *
# Projektcode
beginnen claw_motor.set_position(0, DEGREES)- Schreiben Sie den Befehl claw_motor.set_position() wie oben gezeigt in den Programmierbereich, um die Startposition für die Klaue festzulegen.
claw_motor.set_position(0, GRAD)
claw_motor.set_timeout(2, SEKUNDEN)- Fügen Sie den Befehl claw_motor.set_timeout() wie
oben gezeigt hinzu.
- Beachten Sie, dass diese Anweisung vor dem Befehl claw_motor.spin_for() erscheint. Sein Zweck besteht darin, einzustellen, wie lange der Klauenmotor laufen kann und ihn nach dieser Zeit zu stoppen. Selbst wenn sich der Motor nicht um volle 60 Grad bewegt, stoppt das Projekt den Klauenmotor nach Ablauf von zwei Sekunden.
claw_motor.set_position(0, GRAD)
claw_motor.set_timeout(2, SEKUNDEN)
claw_motor.spin_for(RÜCKWÄRTS, 60, GRAD)- Schreiben Sie den Befehl claw_motor.spin_for() wie oben gezeigt, um die Klaue um 60 Grad zu öffnen.

- Wählen Sie den Steckplatz aus, in den das Projekt auf dem V5 Robot Brain heruntergeladen werden soll, indem Sie das Symbol mit der eingerahmten 1 auswählen, um alle verfügbaren Projektsteckplätze zu öffnen, und wählen Sie den gewünschten Steckplatz aus.
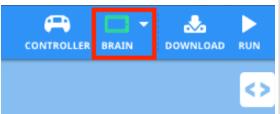
- Verbinden Sie den Roboter mit Ihrem Computer oder Tablet. Das Brain-Symbol in der Symbolleiste wird grün , nachdem eine erfolgreiche Verbindung hergestellt wurde.
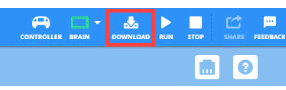
- Klicken Sie auf das Download-Symbol neben dem Geräteinfo-Symbol, um das Projekt auf das V5 Robot Brain herunterzuladen.

- Überprüfen Sie, ob das ClawControl-Projekt im ausgewählten Steckplatz in das Gehirn heruntergeladen wurde.
![]() Lehrer-Toolbox
-
Modell zuerst
Lehrer-Toolbox
-
Modell zuerst
Führen Sie das Projekt vor der Klasse vor, bevor Sie es alle Schüler gleichzeitig ausprobieren lassen. Versammeln Sie die Schüler an einem Ort und positionieren Sie den Clawbot so, dass seine Klaue von allen gesehen werden kann. Wenn Sie die Vorführung mehr als einmal durchführen möchten, können Sie die Klaue zwischen den Durchläufen vorsichtig schließen.
Sagen Sie den Schülern, dass sie jetzt an der Reihe sind, ihre Projekte
durchzuführen.
- Führen Sie das Projekt auf dem Clawbot aus, indem Sie sicherstellen, dass das Projekt ausgewählt ist, und dann die Schaltfläche „Ausführen“ drücken. Herzlichen Glückwunsch zur Erstellung Ihres ersten Projekts zum Bewegen der Klaue!
Schritt 4: Versuchen Sie Folgendes: Schließen Sie die V5-Klaue
Nachdem Sie die Klaue zum Öffnen programmiert haben, programmieren Sie sie nun zum Schließen.
![]() Nachdem Sie die
Klaue nun öffnen können, möchten Sie sie sicherlich auch schließen.
Nachdem Sie die
Klaue nun öffnen können, möchten Sie sie sicherlich auch schließen.
- Kehren Sie zu Ihrem ClawControl-Projekt zurück und fügen Sie einen zusätzlichen Befehl claw_motor.spin_for() hinzu, um den Klauenmotor um 30 Grad zu drehen. Die Klaue sollte sich zur Hälfte schließen, da sie sich ursprünglich um 60 Grad geöffnet hat.
- Testen Sie, ob in Ihrem überarbeiteten Projekt die Klaue 60 Grad geöffnet und dann 30 Grad geschlossen ist, indem Sie Ihr ClawControl-Projekt herunterladen und ausführen.
![]() Lehrer-Toolbox
-
Lösung
Lehrer-Toolbox
-
Lösung
Zuvor öffnete sich die Klaue um 60 Grad. In diesem Projekt war die Anweisung enthalten, ein Timeout für den Motor festzulegen, da es wichtig ist, beim Einschalten eines Manipulators, dessen Bewegung auf irgendeine Weise eingeschränkt sein könnte, ein Timeout festzulegen. Durch das Einstellen einer Zeitüberschreitung wird unnötiger Verschleiß des Motors vermieden.
Nachfolgend sehen Sie die Lösung für diesen Schritt:
# Projektcode beginnen
claw_motor.set_position(0, GRAD)
claw_motor.set_timeout(2, SEKUNDEN)
claw_motor.spin_for(RÜCKWÄRTS, 60, GRAD)
claw_motor.spin_for(VORWÄRTS, 30, GRAD)Schritt 5: Versuchen Sie Folgendes: Mehrere Bewegungen in einer Sequenz ausführen
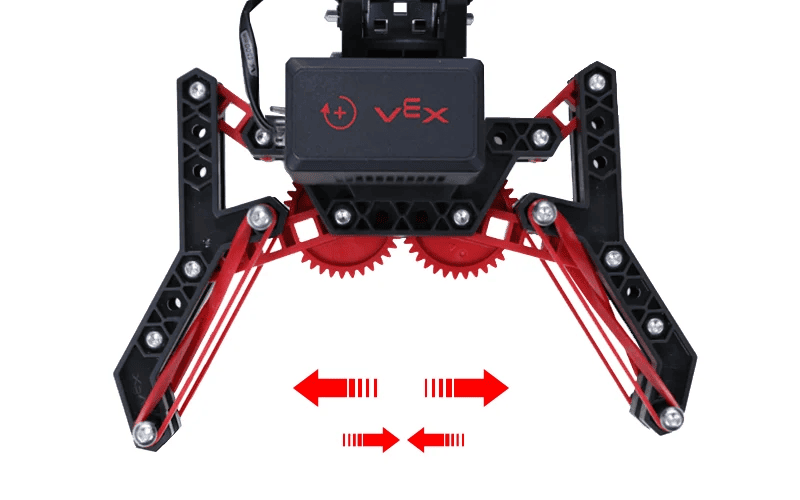
![]() Nicht alles, was
Sie mit der Klaue aufheben, hat die gleiche Größe. Versuchen Sie, die Klaue entlang des
Bewegungsbereichs in verschiedene Positionen zu öffnen.
Nicht alles, was
Sie mit der Klaue aufheben, hat die gleiche Größe. Versuchen Sie, die Klaue entlang des
Bewegungsbereichs in verschiedene Positionen zu öffnen.
- Drehen Sie den Motor, um:
- Offen für 70 Grad
- Schließen für 20 Grad
- Offen für 10 Grad
- Schließen für 30 Grad
- Schließen für 25 Grad
- Wenn der Klauenmotor bei 0 Grad startet, wie viele Grad ist der Klauenmotor am Ende des Projekts geöffnet?
- Beginnen Sie mit geschlossenem Klauenmotor.
![]() Lehrer-Toolbox
-
Lösung
Lehrer-Toolbox
-
Lösung
Die Lösung für diesen Schritt wird unten dargestellt.
Der Klauenmotor ist am Ende des
Projekts immer noch bei 5 Grad geöffnet: 70 – 20 = 50 –> 50 + 10 = 60 –> 60 – 30 =
30 –> 30 – 25 = 5 Grad.
# Projektcode beginnen
# Aktuelle Position der Klaue als Null nehmen
claw_motor.set_position(0, GRAD)
# Timeout der Klaue einstellen
claw_motor.set_timeout(2, SEKUNDEN)
claw_motor.spin_for(RÜCKWÄRTS, 70, GRAD)
claw_motor.spin_for(VORWÄRTS, 20, GRAD)
claw_motor.spin_for(RÜCKWÄRTS, 10, GRAD)
claw_motor.spin_for(VORWÄRTS, 30, GRAD)
claw_motor.spin_for(VORWÄRTS, 25, GRAD)Schritt 6: Abschließen der Lock Tight-Herausforderung

![]() Die Lock Tight-Herausforderung
Die Lock Tight-Herausforderung
- Programmieren Sie den Clawbot so, dass er die Klaue einer leeren 12-Unzen-Aluminiumdose sicher schließt, ohne die Seiten zu zerdrücken.
- Lassen Sie den Clawbot die Dose festhalten, während er seinen Arm um 45 Grad hebt und senkt.
- Der Clawbot sollte dann die Dose loslassen und sich von ihr entfernen.
- Beginnen Sie die Herausforderung mit einer geöffneten Klaue und einer leeren Dose darin.
![]() Tipps für Lehrer
Tipps für Lehrer
- Lassen Sie die Schüler die Herausforderung mit einer geöffneten Klaue und einer leeren Dose darin beginnen.
- Wenn die Dose zerdrückt wird oder aus der Klaue fällt, muss die Challenge nach Anpassung des Projekts neu gestartet werden.
![]() Lehrer-Toolbox
-
Lösung
Lehrer-Toolbox
-
Lösung
Hier ist eine Beispiellösung:
# Projektcode beginnen
# Aktuelle Position der Klaue als Null nehmen
claw_motor.set_position(0, GRAD)
# Timeout der Klaue einstellen
claw_motor.set_timeout(2, SEKUNDEN)
claw_motor.spin_for(VORWÄRTS, 170, GRAD)
arm_motor.spin_for(VORWÄRTS, 45, GRAD)
arm_motor.spin_for(RÜCKWÄRTS, 45, GRAD)
claw_motor.spin_for(RÜCKWÄRTS, 150, GRAD)
drivetrain.drive_for(RÜCKWÄRTS, 150, MM)- Das Projekt stellt das Timeout ein, schließt die Klaue um die Dose, hebt und senkt die Dose, lässt sie los und fährt dann zurück.
-
Rubrik „Programmierung“
(Google Doc / .docx / .pdf )