
অটোমেটেড চ্যালেঞ্জ - সি++
অটোমেড চ্যালেঞ্জ
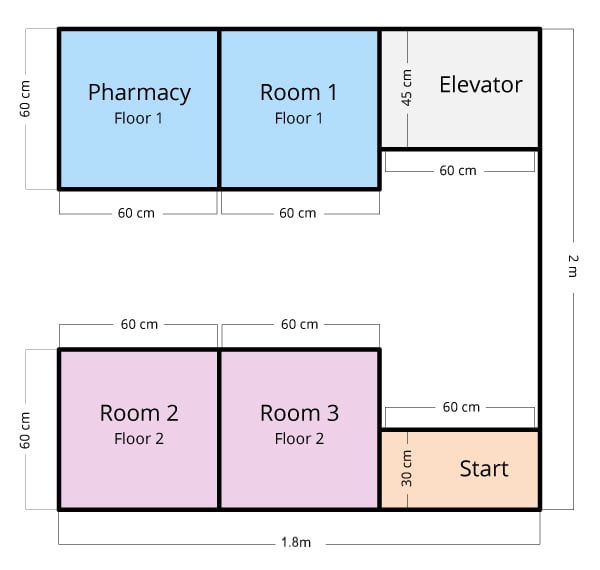
এই চ্যালেঞ্জে, আপনাকে আপনার রোবটকে একটি হাসপাতালে নেভিগেট করার জন্য প্রোগ্রাম করতে হবে কারণ এটি বিভিন্ন কক্ষে রোগীদের ওষুধ সরবরাহ করে ।
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
হাসপাতালের পটভূমি তৈরি করে সম্পৃক্ততা বৃদ্ধি করুন! এটি কোন ধরণের হাসপাতাল এবং হাসপাতালটি কোন ধরণের রোগীদের সেবা প্রদান করে?
চ্যালেঞ্জের নিয়মাবলী
-
রোবটটি অবশ্যই স্টার্ট জোনে শুরু এবং শেষ করতে হবে ।
-
পুরো রোবটকে অবশ্যই ফার্মেসি, লিফট এবং রোগীর কক্ষের ভিতরে থাকতে হবে এবং ক্রিয়াগুলি সম্পূর্ণ করার জন্য নিম্নলিখিত সময়গুলির জন্য অপেক্ষা করতে হবে:
-
ফার্মেসি: ওষুধ পিকআপ করার জন্য কমপক্ষে 5 সেকেন্ড অপেক্ষা করুন ।
-
লিফট: অন্য তলায় পৌঁছানোর জন্য কমপক্ষে 5 সেকেন্ড অপেক্ষা করুন ।
-
রোগীর ঘর: ওষুধ ফেলে দেওয়ার জন্য কমপক্ষে 3 সেকেন্ড অপেক্ষা করুন ।
-
-
রোবটটি অবশ্যই কোনও দেয়ালের সংস্পর্শে আসবে না বা অতিক্রম করবে না ।
-
রোগীর কক্ষের জন্য ওষুধ পিকআপ করার জন্য রোবটকে প্রথমে ফার্মেসিতে যেতে হবে ।
-
ওষুধ ফেলে দেওয়ার জন্য রোবটকে অবশ্যই রোগীর প্রতিটি কক্ষে (কোনও নির্দিষ্ট ক্রমে) যেতে হবে ।
-
মজা করুন!
![]() শিক্ষক টুলবক্স
-
সমাধান
শিক্ষক টুলবক্স
-
সমাধান
শিক্ষার্থীদের মূল্যায়নের জন্য একটি প্রোগ্রামিং রুব্রিক এখানে পাওয়া যাবে (Google / .docx / .pdf ) ।
নীচে একটি VEXcode V5 C++ নমুনা সমাধান দেখুন:
int main() {
// রোবট কনফিগারেশন শুরু করা হচ্ছে। সরাবেন না!
vexcodeInit();
// প্রকল্প কোড শুরু করুন
// ফার্মেসিতে যান
Drivetrain.driveFor(forward, 900, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 1350, mm);
Drivetrain.turnFor(direct, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
wait(6, seconds);
// রুম 1 এ যান
Drivetrain.driveFor(reverse, 600, mm);
Drivetrain.turnFor(direct, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
wait(5, seconds);
// লিফটে যান
Drivetrain.driveFor(বিপরীত, ৬০০, মিমি);
Drivetrain.turnFor(ডানদিকে, ৯০, ডিগ্রি);
Drivetrain.driveFor(সামনে, ৬০০, মিমি);
Drivetrain.turnFor(বামদিকে, ৯০, ডিগ্রি);
Drivetrain.driveFor(সামনে, ৬০০, মিমি);
wait(৬, সেকেন্ড);
// ২ নম্বর ঘরে যান
Drivetrain.driveFor(বিপরীত, ৮০০, মিমি);
Drivetrain.turnFor(বামদিকে, ৯০, ডিগ্রি);
Drivetrain.driveFor(সামনে, ১০০০, মিমি);
Drivetrain.turnFor(বামদিকে, ৯০, ডিগ্রি);
Drivetrain.driveFor(সামনে, ৮০০, মিমি);
wait(৫, সেকেন্ড);
// ৩ নম্বর ঘরে যান
Drivetrain.driveFor(বিপরীত, ৮০০, মিমি);
Drivetrain.turnFor(বাম, 90, ডিগ্রি);
Drivetrain.driveFor(ফরোয়ার্ড, 600, মিমি);
Drivetrain.turnFor(ডান, 90, ডিগ্রি);
Drivetrain.driveFor(ফরোয়ার্ড, 800, মিমি);
wait(5, সেকেন্ড);
// লিফটে যান
Drivetrain.driveFor(বিপরীত, 800, মিমি);
Drivetrain.turnFor(বাম, 90, ডিগ্রি);
Drivetrain.driveFor(ফরোয়ার্ড, 600, মিমি);
Drivetrain.turnFor(ডান, 90, ডিগ্রি);
Drivetrain.driveFor(ফরোয়ার্ড, 800, মিমি);
wait(6, সেকেন্ড);
// শুরুর জোনে ফিরে যান
Drivetrain.driveFor(ফরোয়ার্ড, 1500, মিমি);
}