
Otomatik Mücadele - C++
Otomatik Görev
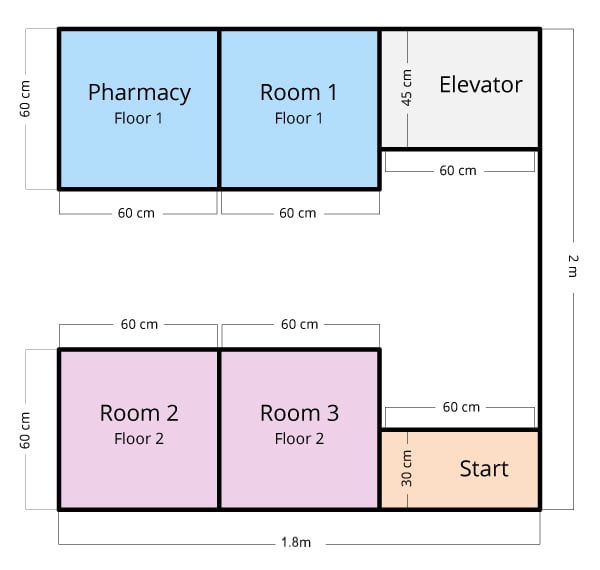
Bu zorlukta, robotunuzu birkaç farklı odadaki hastalara ilaç verirken bir hastanede gezinecek şekilde programlamanız gerekir.
![]() Öğretmen İpuçları
Öğretmen İpuçları
Hastanenin geçmişini anlatarak etkileşimi artırın! Hastaneniz ne tür bir hastanedir ve hangi tip hastalara hizmet vermektedir?
Meydan Okuma Kuralları
-
Robot, Başlangıç Bölgesinde başlamalı ve bitmelidir.
-
Robotun tamamı Eczane, Asansör ve Hasta Odalarının içinde olmalı ve eylemleri tamamlamak için aşağıdaki süreleri beklemelidir:
-
Eczane: İlaçları almak için en az 5 saniye bekleyin.
-
Asansör: Başka bir kata ulaşmak için en az 5 saniye bekleyin.
-
Hasta Odası: İlaçları bırakmak için en az 3 saniye bekleyin.
-
-
Robot herhangi bir duvara temas etmemeli veya üzerinden geçmemelidir.
-
Robot, Hasta Odaları için ilaç almak için önce Eczaneyi ziyaret etmelidir.
-
Robot, ilacı bırakmak için Hasta Odalarının her birini (belirli bir sırayla değil) ziyaret etmelidir.
-
İyi eğlenceler!
![]() Öğretmen Araç Kutusu
-
Çözümü
Öğretmen Araç Kutusu
-
Çözümü
Öğrencileri değerlendirmek için bir programlama ölçütü burada bulunabilir (Google / .docx / .pdf ).
Aşağıda bir VEXcode V5 C++ örnek çözümü görüntüleyin:
int main() {
// Robot Yapılandırması Başlatılıyor. ÇIKARMAYIN!
vexcodeInit();
// Proje kodunu başlat
// Eczaneye git
Drivetrain.driveFor(ileri, 900, mm);
Drivetrain.turnFor(sol, 90, derece);
Drivetrain.driveFor(ileri, 1350, mm);
Drivetrain.turnFor(sağ, 90, derece);
Drivetrain.driveFor(ileri, 600, mm);
wait(6, saniye);
// 1 numaralı odaya git
Drivetrain.driveFor(geri, 600, mm);
Drivetrain.turnFor(sağ, 90, derece);
Drivetrain.driveFor(ileri, 600, mm);
Drivetrain.turnFor(sol, 90, derece);
Drivetrain.driveFor(ileri, 600, mm);
wait(5, saniye);
// Asansöre git
Drivetrain.driveFor(geri, 600, mm);
Drivetrain.turnFor(sağ, 90, derece);
Drivetrain.driveFor(ileri, 600, mm);
Drivetrain.turnFor(sol, 90, derece);
Drivetrain.driveFor(ileri, 600, mm);
wait(6, saniye);
// 2 numaralı odaya git
Drivetrain.driveFor(geri, 800, mm);
Drivetrain.turnFor(sol, 90, derece);
Drivetrain.driveFor(ileri, 1000, mm);
Drivetrain.turnFor(sol, 90, derece);
Drivetrain.driveFor(ileri, 800, mm);
wait(5, saniye);
// 3 numaralı odaya git
Drivetrain.driveFor(geri, 800, mm);
Drivetrain.turnFor(sol, 90, derece);
Drivetrain.driveFor(ileri, 600, mm);
Drivetrain.turnFor(sağ, 90, derece);
Drivetrain.driveFor(ileri, 800, mm);
wait(5, saniye);
// Asansöre git
Drivetrain.driveFor(geri, 800, mm);
Drivetrain.turnFor(sol, 90, derece);
Drivetrain.driveFor(ileri, 600, mm);
Drivetrain.turnFor(sağ, 90, derece);
Drivetrain.driveFor(ileri, 800, mm);
wait(6, saniye);
// Başlangıç bölgesine geri dön
Drivetrain.driveFor(forward, 1500, mm);
}