
ഓട്ടോമേറ്റഡ് ചലഞ്ച് - സി++
ഓട്ടോമേറ്റഡ് ചലഞ്ച്
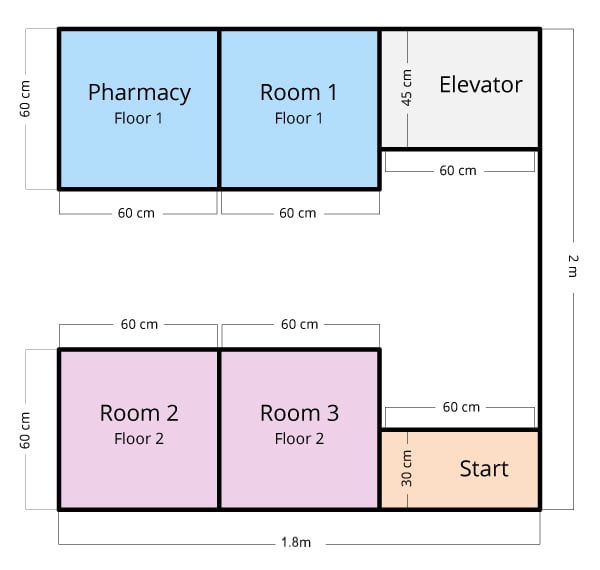
ഈ വെല്ലുവിളിയിൽ, നിങ്ങളുടെ റോബോട്ട് ആശുപത്രിയിലേക്ക് നാവിഗേറ്റ് ചെയ്യുന്നതിനായി പ്രോഗ്രാം ചെയ്യേണ്ടതുണ്ട്, കാരണം അത് വ്യത്യസ്ത മുറികളിലായി രോഗികൾക്ക് മരുന്നുകൾ എത്തിക്കുന്നു.
![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
ആശുപത്രിയുടെ ഒരു പിന്നാമ്പുറക്കഥ സൃഷ്ടിച്ചുകൊണ്ട് ഇടപഴകൽ വർദ്ധിപ്പിക്കുക! ഇത് ഏത് തരം ആശുപത്രിയാണ്, ഏത് തരം രോഗികൾക്കാണ് ആശുപത്രി സേവനം നൽകുന്നത്?
വെല്ലുവിളി നിയമങ്ങൾ
-
റോബോട്ട് സ്റ്റാർട്ട് സോണിൽ ആരംഭിക്കുകയും അവസാനിക്കുകയും വേണം.
-
മുഴുവൻ റോബോട്ടും ഫാർമസി, എലിവേറ്റർ, രോഗി മുറികൾ എന്നിവയ്ക്കുള്ളിലായിരിക്കണം, പ്രവർത്തനങ്ങൾ പൂർത്തിയാക്കുന്നതിന് ഇനിപ്പറയുന്ന സമയങ്ങൾക്കായി കാത്തിരിക്കണം:
-
ഫാർമസി: മരുന്നുകൾ എടുക്കാൻ കുറഞ്ഞത് 5 സെക്കൻഡ് കാത്തിരിക്കുക.
-
ലിഫ്റ്റ്: മറ്റൊരു നിലയിലെത്താൻ കുറഞ്ഞത് 5 സെക്കൻഡ് കാത്തിരിക്കുക.
-
രോഗി മുറി: മരുന്നുകൾ ഉപേക്ഷിക്കാൻ കുറഞ്ഞത് 3 സെക്കൻഡ് കാത്തിരിക്കുക.
-
-
റോബോട്ട് ഏതെങ്കിലും മതിലുകളുമായി സമ്പർക്കം പുലർത്തുകയോ അതിലൂടെ കടന്നുപോകുകയോ ചെയ്യരുത്.
-
രോഗികളുടെ മുറികളിലേക്കുള്ള മരുന്നുകൾ എടുക്കാൻ റോബോട്ട് ആദ്യം ഫാർമസി സന്ദർശിക്കണം.
-
മരുന്നുകൾ വിതരണം ചെയ്യുന്നതിനായി റോബോട്ട് ഓരോ രോഗി മുറിയും സന്ദർശിക്കണം (പ്രത്യേക ക്രമത്തിലല്ല).
-
ആസ്വദിക്കൂ!
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
വിദ്യാർത്ഥികളെ വിലയിരുത്തുന്നതിനുള്ള ഒരു പ്രോഗ്രാമിംഗ് റൂബ്രിക് ഇവിടെ കാണാം (Google / .docx / .pdf ) .
താഴെ ഒരു VEXcode V5 C++ സാമ്പിൾ സൊല്യൂഷൻ കാണുക:
int main() {
// റോബോട്ട് കോൺഫിഗറേഷൻ ആരംഭിക്കുന്നു. നീക്കം ചെയ്യരുത്!
vexcodeInit();
// പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുക // ഫാർമസി
ലേക്ക് പോകുക Drivetrain.driveFor(മുന്നോട്ട്, 900, mm);
Drivetrain.turnFor(ഇടത്, 90, ഡിഗ്രികൾ);
Drivetrain.driveFor(മുന്നോട്ട്, 1350, mm);
Drivetrain.turnFor(വലത്, 90, ഡിഗ്രികൾ);
Drivetrain.driveFor(മുന്നോട്ട്, 600, mm);
കാത്തിരിക്കുക(6, സെക്കൻഡ്);
// റൂം 1 ലേക്ക് പോകുക
Drivetrain.driveFor(റിവേഴ്സ്, 600, mm);
Drivetrain.turnFor(വലത്, 90, ഡിഗ്രികൾ);
Drivetrain.driveFor(മുന്നോട്ട്, 600, mm);
Drivetrain.turnFor(ഇടത്, 90, ഡിഗ്രികൾ);
Drivetrain.driveFor(മുന്നോട്ട്, 600, mm);
കാത്തിരിക്കുക(5, സെക്കൻഡ്);
// എലിവേറ്റർ
ലേക്ക് പോകുക Drivetrain.driveFor(reverse, 600, mm);
Drivetrain.turnFor(right, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
കാത്തിരിക്കുക(6, seconds);
// റൂം 2-ലേക്ക് പോകുക
Drivetrain.driveFor(reverse, 800, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 1000, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 800, mm);
കാത്തിരിക്കുക(5, seconds);
// റൂം 3-ലേക്ക് പോകുക
Drivetrain.driveFor(reverse, 800, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
Drivetrain.driveFor(forward, 90, degrees);
Drivetrain.driveFor(forward, 800, mm);
wait(5, seconds);
// എലിവേറ്ററിലേക്ക് പോകുക
Drivetrain.driveFor(reverse, 800, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
Drivetrain.turnFor(right, 90, degrees);
Drivetrain.driveFor(forward, 800, mm);
wait(6, seconds);
// സ്റ്റാർട്ട് സോണിലേക്ക് തിരികെ പോകുക
Drivetrain.driveFor(forward, 1500, mm);
}