
ऑटोमेड चैलेंज - C++
स्वचालित चुनौती
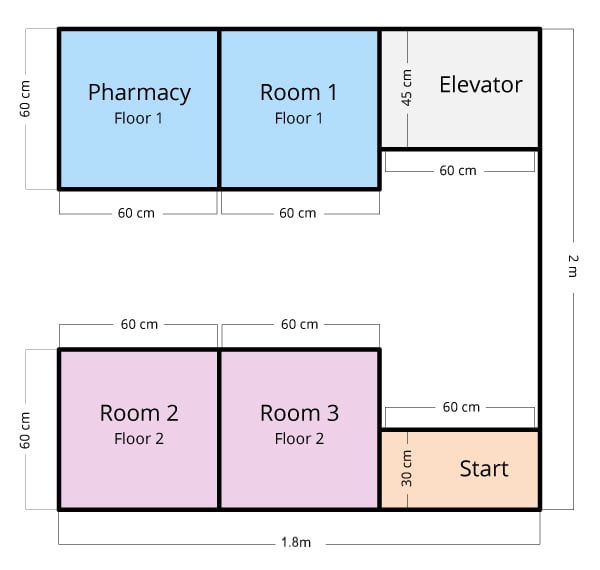
इस चुनौती में, आपको अपने रोबोट को अस्पताल में विभिन्न कमरों में मरीजों को दवाइयां वितरित करते समय नेविगेट करने के लिए प्रोग्राम करना होगा।
![]() शिक्षक युक्तियाँ
शिक्षक युक्तियाँ
अस्पताल की पृष्ठभूमि बनाकर सहभागिता बढ़ाएँ! यह किस प्रकार का अस्पताल है और यह किस प्रकार के रोगियों की सेवा करता है?
चुनौती नियम
-
रोबोट को स्टार्ट ज़ोन में शुरू और ख़त्म होना चाहिए।
-
संपूर्ण रोबोट को फार्मेसी, लिफ्ट और रोगी कक्ष के अंदर होना चाहिए और क्रियाओं को पूरा करने के लिए निम्नलिखित समय की प्रतीक्षा करनी चाहिए:
-
फार्मेसी: दवा लेने के लिए कम से कम 5 सेकंड प्रतीक्षा करें।
-
लिफ्ट: दूसरी मंजिल तक पहुंचने के लिए कम से कम 5 सेकंड प्रतीक्षा करें।
-
रोगी कक्ष: दवाइयां छोड़ने के लिए कम से कम 3 सेकंड प्रतीक्षा करें।
-
-
रोबोट को किसी भी दीवार के संपर्क में नहीं आना चाहिए या उसके ऊपर से नहीं गुजरना चाहिए।
-
रोबोट को पहले मरीज के कमरे के लिए दवाइयां लेने के लिए फार्मेसी जाना होगा।
-
रोबोट को दवाइयां छोड़ने के लिए प्रत्येक रोगी कक्ष में जाना होगा (किसी विशेष क्रम में नहीं)।
-
मजा करो!
![]() शिक्षक टूलबॉक्स
-
समाधान
शिक्षक टूलबॉक्स
-
समाधान
छात्रों का मूल्यांकन करने के लिए एक प्रोग्रामिंग रूब्रिक यहां पाया जा सकता है (Google / .docx / .pdf )
नीचे एक VEXcode V5 C++ नमूना समाधान देखें:
int main() {
// रोबोट कॉन्फ़िगरेशन आरंभ कर रहा है. दूर नहीं करते!
vexcodeInit();
// प्रोजेक्ट कोड शुरू करें
// फार्मेसी पर जाएं
Drivetrain.driveFor(forward, 900, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 1350, mm);
Drivetrain.turnFor(right, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
wait(6, seconds);
// कमरा 1 पर जाएं
Drivetrain.driveFor(reverse, 600, mm);
Drivetrain.turnFor(right, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
Drivetrain.turnFor(left, 90, degrees);
Drivetrain.driveFor(forward, 600, mm);
wait(5, seconds);
// लिफ्ट पर जाएं
Drivetrain.driveFor(रिवर्स, 600, मिमी);
Drivetrain.turnFor(दाएं, 90, डिग्री);
Drivetrain.driveFor(आगे, 600, मिमी);
Drivetrain.turnFor(बाएं, 90, डिग्री);
Drivetrain.driveFor(आगे, 600, मिमी);
wait(6, सेकंड);
// कमरा 2 पर जाएं
Drivetrain.driveFor(रिवर्स, 800, मिमी);
Drivetrain.turnFor(बाएं, 90, डिग्री);
Drivetrain.driveFor(आगे, 1000, मिमी);
Drivetrain.turnFor(बाएं, 90, डिग्री);
Drivetrain.driveFor(आगे, 800, मिमी);
wait(5, सेकंड);
// कमरा 3 पर जाएं
Drivetrain.driveFor(रिवर्स, 800, मिमी);
Drivetrain.turnFor(बाएं, 90, डिग्री);
Drivetrain.driveFor(आगे, 600, मिमी);
Drivetrain.turnFor(दाएं, 90, डिग्री);
Drivetrain.driveFor(आगे, 800, मिमी);
wait(5, सेकंड);
// लिफ्ट पर जाएं
Drivetrain.driveFor(रिवर्स, 800, मिमी);
Drivetrain.turnFor(बाएं, 90, डिग्री);
Drivetrain.driveFor(आगे, 600, मिमी);
Drivetrain.turnFor(दाएं, 90, डिग्री);
Drivetrain.driveFor(आगे, 800, मिमी);
wait(6, सेकंड);
// प्रारंभिक क्षेत्र में वापस जाएं
Drivetrain.driveFor(आगे, 1500, मिमी);