
Programování otáčení doprava a doleva - Python
Speedbot je připraven k otáčení!
Tento průzkum vám poskytne nástroje, abyste mohli začít vytvářet některé skvělé projekty, které bude váš Speedbot sledovat.
- Pokyny VEXcode V5 Python, které budou použity při tomto průzkumu:
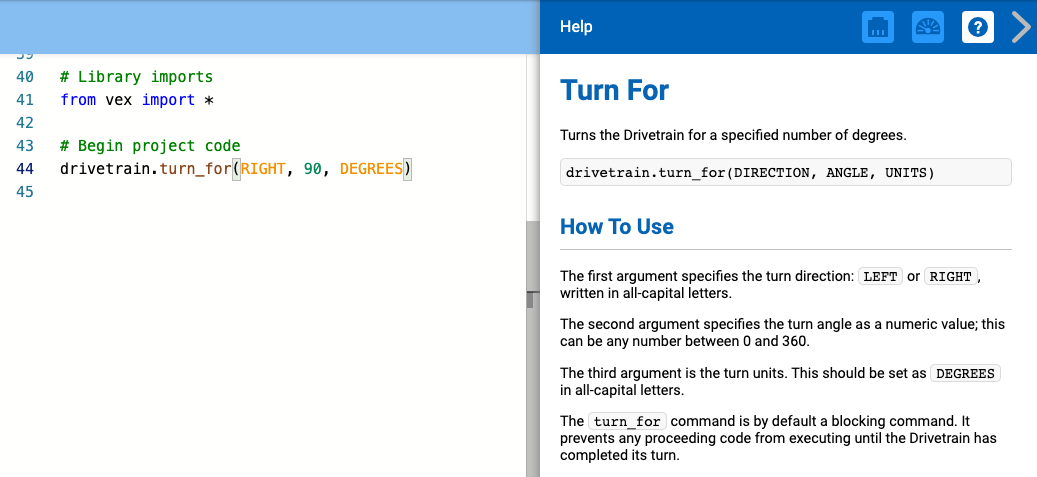
- drivetrain.turn_for(VPRAVO, 90 STUPŇŮ)
-
Chcete-li se dozvědět více informací o pokynech, vyberte Nápověda a poté vyberte ikonu otazníku vedle příkazu pro zobrazení dalších informací.
- Ujistěte se, že máte požadovaný hardware, svůj technický notebook a VEXcode V5 stažený a připravený.
| Množství | Potřebný materiál |
|---|---|
| 1 |
Speedbot Robot |
| 1 |
Nabitá baterie robota |
| 1 |
VEXkód V5 |
| 1 |
USB kabel (pokud používáte počítač) |
| 1 |
Technický poznámkový blok |
Krok 1: Příprava na průzkum
Než začnete s aktivitou, máte každou z těchto položek připravenou?
- Jsou všechny motoryzapojeny do správných portů?
- Jsou inteligentní kabelyzcela zasunutydo všech motorů?
- Je mozek zapnutý na?
- Je baterie
Krok 2: Zahájení nového projektu
Pro zahájení projektu proveďte následující kroky:
-
Otevřete nabídku Soubor a vyberte Otevřít příklady.

-
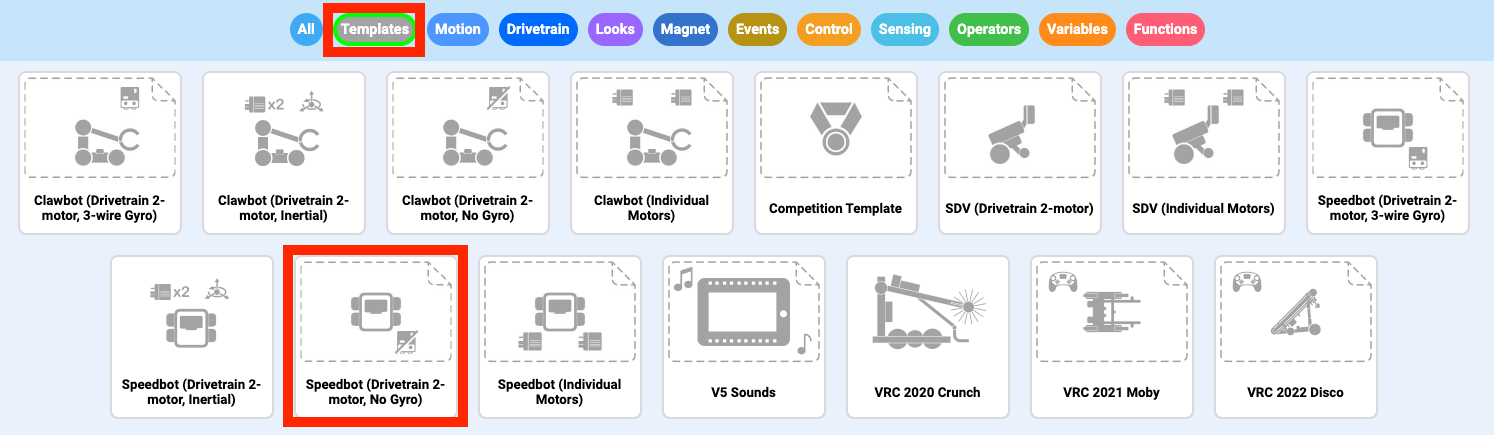
Vyberte a otevřete projekt šablony Speedbot (Drivetrain 2-motor, No Gyro). Šablona projektu obsahuje konfiguraci motorupro Speedbot. Pokud šablonu nepoužijete, váš robot nebude projekt spouštět správně.
-
Protože budete pracovat na otáčení Speedbota, pojmenujete svůj projektOtočení.

-
Po dokončení vyberteUložit.

![]() Tipy pro učitele
Tipy pro učitele
Názvy projektů mohou mít mezery mezi slovy nebo za nimi.
Krok 3: Odbočte doprava
Nyní jste připraveni začít programovat robota, aby se otočil doprava!
-
Přidejte instrukce do projektu, aby váš projekt vypadal takto:
# Import knihovny z importu vex * # Zahájit kód projektu drivetrain.turn_for(VPRAVO, 90, STUPNĚ) - Vyberte ikonu slotu pro výběr jednoho z osmi dostupných slotů v mozku robota a vyberte slot 1.
- Připojte robotický mozek V5 k počítači pomocí kabelu micro USB a zapněte robotický mozek V5. Ikona mozku na panelu nástrojůse po úspěšném navázání připojení rozsvítí zeleně.
- Když je robotický mozek V5 připojen k počítači, ikona Build (Sestavit) se změní na ikonu Download (Stáhnout). VyberteStáhnoutpro stažení projektu do Brainu.
![]() Sada nástrojů pro učitele
Sada nástrojů pro učitele
Připomeňte studentům, aby odpojili USB kabel od robotického mozku. Pokud je robot během spouštění projektu připojen k počítači, může to způsobit, že bude tahat za připojovací kabel.
![]() Sada nástrojů pro učitele
Zastavte
a diskutujte
Sada nástrojů pro učitele
Zastavte
a diskutujte
Požádejte studenty, aby předpověděli, co si myslí, že se stane, když si tento projekt stáhnou a spustí na Speedbotu. Řekněte studentům, aby si své předpovědi zaznamenali do technických sešitů. Pokud to čas dovolí, požádejte každou skupinu, aby se podělila o své předpovědi.
-
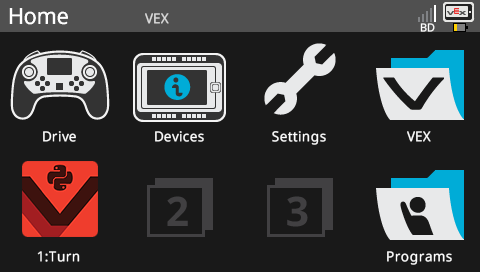
Zkontrolujte, zda se váš projekt (Python) stáhl, a to pohledem na obrazovku robotického mozku. Název projektu Turn by měl být uveden na Slotu 1.
![]() Sada nástrojů pro učitele
Model
Sada nástrojů pro učitele
Model
-
Předveďte spuštění projektu před třídou, než ho všichni studenti zkusí najednou. Shromážděte studenty na jednom místě a nechte dostatek prostoru pro pohyb Speedbota, pokud je umístěn na podlaze.
-
Řekněte studentům, že nyní je řada na nich, aby spustili svůj projekt. Ujistěte se, že mají volnou cestu a že do sebe žádní Speedboti nenarazí.
-
Připomeňte studentům, aby si své projekty během práce ukládali. Tato sekce (Python) z knihovny VEX vysvětluje postupy ukládání ve VEXcode V5.
- Spusťte projekt (Python) na robotu Speedbot tak, že se ujistíte, že je projekt vybrán, a poté stiskněte tlačítkoSpustitna robotickém mozku.
Krok 4: Odbočte doleva
Nyní, když jste naprogramovali robota, aby zahnul doprava, dovolte nám, abychom ho naprogramovali, aby zahnul doleva.
-
Změňte parametr v instrukci tak, aby se zobrazovaloLEFTmístoRIGHT, takže váš projekt bude vypadat takto:
# Import knihovny z importu vex * # Zahájit kód projektudrivetrain.turn_for (VLEVO, 90 STUPŇŮ) - Vyberte název projektu a změňte jej z Turn to TurnLeft.
- Vyberte ikonu Slot pro výběr nového slotu. Vyberte slot 2.
- Stáhněte si (Python) projekt.
- Zkontrolujte, zda se váš projekt stáhl (Python), a to pohledem na obrazovku robotického mozku. Název projektu TurnLeft by měl být uveden na Slotu 2.
- Spusťte (Python) projekt na robotu tak, že se ujistíte, že je projekt vybrán, a poté stiskněte tlačítkoSpustit.
Krok 5: Počkejte a pak odbočte doleva
Nyní, když jsme naprogramovali robota, aby se otočil doleva doprava a pak doleva, můžeme nyní přidat čekací pokyn, aby robot počkal určitou dobu, než se otočí doleva.
-
Přidejte příkaz wait před příkaz drive_for. Ujistěte se, že je čekání odsazeno tak, aby odpovídalo příkazu drive_for a že všechny příkazy jsou pod komentářem „Zahájit kód projektu“. To říká robotu, aby počkal tři sekundy před jízdou dozadu.
# Zahájit čekání kódu projektu (3 SEKUNDY) drivevetrain.turn_for(VLEVO, 90 STUPŇŮ) - Vyberte název projektu a změňte jej z TurnLeft na WaitLeft.
- Vyberte ikonu Slot pro výběr nového slotu. Vyberte slot 3.
- Stáhněte si (Python) projekt.
- Zkontrolujte, zda se váš projekt stáhl (Python), a to pohledem na obrazovku robotického mozku. Název projektu WaitLeft by měl být uveden na místě 3.
- Spusťte (Python) projekt na robotu tak, že se ujistíte, že je projekt vybrán, a poté stiskněte tlačítkoSpustit.
Krok 6: Dokončete výzvu s bezpečnostní kamerou!
 Rozvržení výzvy
Rozvržení výzvy V soutěži bezpečnostních kamer musí robot začít otočením doprava o 90 stupňů. Robot se pak otočí doleva o 180 stupňů a pak doprava o 180 stupňů „skenuje“ stejně jako bezpečnostní kamera. Robot pak zopakuje otočení o 180 stupňů doleva a o 180 stupňů doprava ještě dvakrát. Robot tak celkem třikrát naskenuje o 180 stupňů.
Před programováním robota si naplánujte jeho trajektorii a chování ve svém technickém sešitě.
Po dokončení výzvy Bezpečnostní kamera budete schopni kombinovat pohyby vpřed a vzad s dalším chováním robota a splnit tak ještě pokročilejší výzvy.
![]() Řešení
–
pro učitele – sada nástrojů
Řešení
–
pro učitele – sada nástrojů
Podívejte se na ukázkové řešení níže:
# Knihovna importuje
z vex import *
# Začátek kódu projektu
# Robot se otočí doprava o 90 stupňů
drivetrain.turn_for(RIGHT, 90, DEGREES)
# Robot se otočí doleva o 180 stupňů
drivetrain.turn_for(LEFT, 180, DEGREES)
# Robot se otočí doprava o 180 stupňů
drivetrain.turn_for(RIGHT, 180, DEGREES)
# Robot se otočí doleva o 180 stupňů
drivetrain.turn_for(LEFT, 180, DEGREES)
# Robot se otočí doprava o 180 stupňů
drivetrain.turn_for(RIGHT, 180, DEGREES)
# Robot se otočí doleva o 180 stupňů
drivetrain.turn_for(LEFT, 180, DEGREES)
# Robot se otočí doprava o 180 stupňů
drivetrain.turn_for(DOPRAVA, 180, STUPŇŮ)