
പ്രോഗ്രാമിംഗ് വലത്തോട്ടും ഇടത്തോട്ടും തിരിയുന്നു - പൈത്തൺ
സ്പീഡ്ബോട്ട് തിരിയാൻ തയ്യാറാണ്!
നിങ്ങളുടെ സ്പീഡ്ബോട്ടിന് പിന്തുടരുന്നതിനായി ചില രസകരമായ പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ തുടങ്ങുന്നതിനുള്ള ഉപകരണങ്ങൾ ഈ പര്യവേക്ഷണം നിങ്ങൾക്ക് നൽകും.
- ഈ പര്യവേഷണത്തിൽ ഉപയോഗിക്കുന്ന VEXcode V5 പൈത്തൺ നിർദ്ദേശങ്ങൾ:
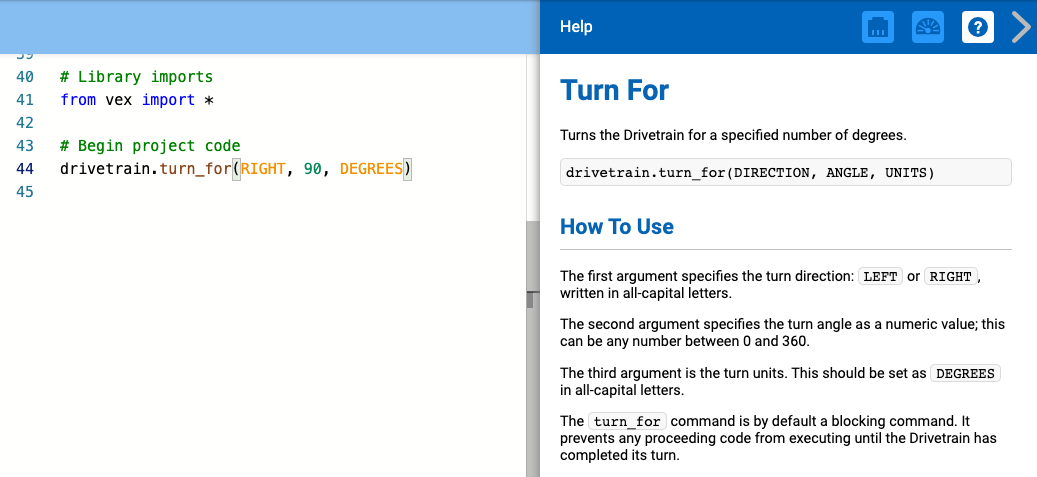
- ഡ്രൈവ്ട്രെയിൻ.ടേൺ_ഫോർ(വലത്, 90, ഡിഗ്രി)
-
നിർദ്ദേശത്തെക്കുറിച്ച് കൂടുതൽ വിവരങ്ങൾ കണ്ടെത്താൻ, സഹായം തിരഞ്ഞെടുക്കുക, തുടർന്ന് കൂടുതൽ വിവരങ്ങൾ കാണുന്നതിന് ഒരു കമാൻഡിന് അടുത്തുള്ള ചോദ്യചിഹ്ന ഐക്കൺ തിരഞ്ഞെടുക്കുക.
- ആവശ്യമായ ഹാർഡ്വെയർ, എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക്, VEXcode V5 എന്നിവ ഡൗൺലോഡ് ചെയ്ത് തയ്യാറായിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക.
| അളവ് | ആവശ്യമായ വസ്തുക്കൾ |
|---|---|
| 1 |
സ്പീഡ്ബോട്ട് റോബോട്ട് |
| 1 |
ചാർജ്ജ് ചെയ്ത റോബോട്ട് ബാറ്ററി |
| 1 |
VEXcode V5 |
| 1 |
യുഎസ്ബി കേബിൾ (കമ്പ്യൂട്ടർ ഉപയോഗിക്കുകയാണെങ്കിൽ) |
| 1 |
എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്ക് |
ഘട്ടം 1: പര്യവേക്ഷണത്തിനുള്ള തയ്യാറെടുപ്പ്
പ്രവർത്തനം ആരംഭിക്കുന്നതിന് മുമ്പ്, ഈ ഇനങ്ങൾ ഓരോന്നും നിങ്ങളുടെ കൈവശം തയ്യാറായിട്ടുണ്ടോ?
- പ്ലഗ് ചെയ്തിരിക്കുന്ന എല്ലാ മോട്ടോറുകളും ശരിയായ പോർട്ടുകളാണോ?
- എല്ലാ മോട്ടോറുകളിലും സ്മാർട്ട് കേബിളുകൾപൂർണ്ണമായുംചേർത്തിട്ടുണ്ടോ?
- ബ്രെയിൻഓൺ ആണോ?
- ബാറ്ററിചാർജ്ജ്ആണോ?
ഘട്ടം 2: ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിക്കുക
പദ്ധതി ആരംഭിക്കുന്നതിന് ഇനിപ്പറയുന്ന ഘട്ടങ്ങൾ പൂർത്തിയാക്കുക:
-
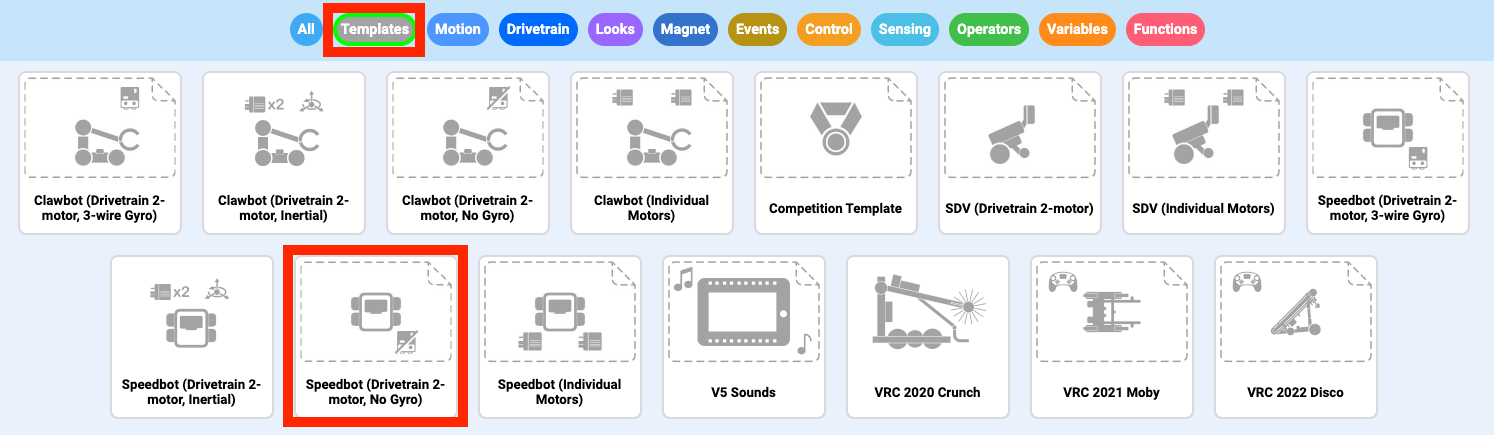
ഫയൽ മെനു തുറന്ന് ഉദാഹരണങ്ങൾ തുറക്കുക തിരഞ്ഞെടുക്കുക.

-
സ്പീഡ്ബോട്ട് (ഡ്രൈവ്ട്രെയിൻ 2-മോട്ടോർ, ഗൈറോ ഇല്ല) ടെംപ്ലേറ്റ് പ്രോജക്റ്റ് തിരഞ്ഞെടുത്ത് തുറക്കുക. ടെംപ്ലേറ്റ് പ്രോജക്റ്റിൽ സ്പീഡ്ബോട്ടിന്റെമോട്ടോർ കോൺഫിഗറേഷൻഅടങ്ങിയിരിക്കുന്നു. ടെംപ്ലേറ്റ് ഉപയോഗിക്കുന്നില്ലെങ്കിൽ, നിങ്ങളുടെ റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി പ്രവർത്തിപ്പിക്കില്ല.
-
നിങ്ങൾ സ്പീഡ്ബോട്ട് തിരിക്കുന്നതിൽ പ്രവർത്തിക്കുമെന്നതിനാൽ, നിങ്ങളുടെ പ്രോജക്റ്റിന്ടേൺഎന്ന് പേരിടും.

-
പൂർത്തിയാകുമ്പോൾ,സേവ്തിരഞ്ഞെടുക്കുക.

![]() അധ്യാപക നുറുങ്ങുകൾ
അധ്യാപക നുറുങ്ങുകൾ
പ്രോജക്റ്റ് നാമങ്ങളിൽ വാക്കുകൾക്കിടയിലോ ശേഷമോ ഇടങ്ങൾ ഉണ്ടാകാം.
ഘട്ടം 3: വലത്തേക്ക് തിരിയുക
ഇപ്പോൾ നിങ്ങൾ റോബോട്ട് വലത്തേക്ക് തിരിയാൻ പ്രോഗ്രാം ചെയ്യാൻ തയ്യാറാണ്!
-
പ്രോജക്റ്റിലേക്ക് നിർദ്ദേശങ്ങൾ ചേർക്കുക, അങ്ങനെ നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ കാണപ്പെടും:
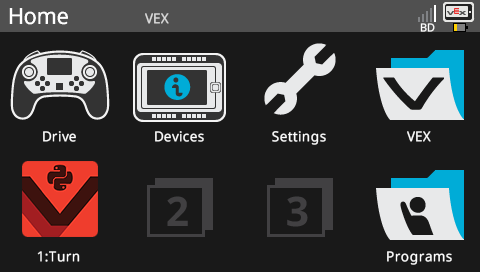
# ലൈബ്രറി vex import ൽ നിന്ന് ഇറക്കുമതി ചെയ്യുന്നു * # Begin project code drivetrain.turn_for(RIGHT, 90, DEGREES) - റോബോട്ട് ബ്രെയിനിൽ ലഭ്യമായ എട്ട് സ്ലോട്ടുകളിൽ ഒന്ന് തിരഞ്ഞെടുക്കാൻ സ്ലോട്ട് ഐക്കൺ തിരഞ്ഞെടുത്ത് സ്ലോട്ട് 1 തിരഞ്ഞെടുക്കുക.
- ഒരു മൈക്രോ യുഎസ്ബി കേബിൾ ഉപയോഗിച്ച് V5 റോബോട്ട് ബ്രെയിൻ കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ച് V5 റോബോട്ട് ബ്രെയിൻ ഓൺ ചെയ്യുക. കണക്ഷൻ വിജയകരമായി പൂർത്തിയായിക്കഴിഞ്ഞാൽ, ടൂൾബാറിലെബ്രെയിൻ ഐക്കൺ പച്ചആയി മാറുന്നു.
- V5 റോബോട്ട് ബ്രെയിൻ കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിക്കുമ്പോൾ, ബിൽഡ് ഐക്കൺ ഡൗൺലോഡ് ഐക്കണായി മാറുന്നു. പ്രോജക്റ്റ് ബ്രെയിനിലേക്ക് ഡൗൺലോഡ് ചെയ്യാൻഡൗൺലോഡ്തിരഞ്ഞെടുക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
ടീച്ചർ ടൂൾബോക്സ്
റോബോട്ട് ബ്രെയിനിൽ നിന്ന് യുഎസ്ബി കേബിൾ വിച്ഛേദിക്കാൻ വിദ്യാർത്ഥികളെ ഓർമ്മിപ്പിക്കുക. ഒരു പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ റോബോട്ട് ഒരു കമ്പ്യൂട്ടറുമായി ബന്ധിപ്പിച്ചിരിക്കുന്നത് റോബോട്ട് കണക്ഷൻ കേബിളിൽ വലിക്കാൻ ഇടയാക്കും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ടീച്ചർ ടൂൾബോക്സ്
-
നിർത്തി ചർച്ച ചെയ്യുക
ഈ പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്ത് സ്പീഡ്ബോട്ടിൽ പ്രവർത്തിപ്പിക്കുമ്പോൾ എന്ത് സംഭവിക്കുമെന്ന് വിദ്യാർത്ഥികൾക്ക് പ്രവചിക്കാൻ ആവശ്യപ്പെടുക. വിദ്യാർത്ഥികളോട് അവരുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കുകളിൽ അവരുടെ പ്രവചനങ്ങൾ രേഖപ്പെടുത്താൻ പറയുക. സമയം അനുവദിക്കുമെങ്കിൽ, ഓരോ ഗ്രൂപ്പിനോടും അവരുടെ പ്രവചനങ്ങൾ പങ്കിടാൻ ആവശ്യപ്പെടുക.
-
റോബോട്ട് ബ്രെയിനിന്റെ സ്ക്രീൻ നോക്കി നിങ്ങളുടെ പ്രോജക്റ്റ് (പൈത്തൺ) ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. സ്ലോട്ട് 1 ൽ പ്രോജക്റ്റ് നാമം ടേൺ ലിസ്റ്റ് ചെയ്തിരിക്കണം.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
ടീച്ചർ ടൂൾബോക്സ്
-
മോഡൽ ആദ്യം
-
എല്ലാ വിദ്യാർത്ഥികളെയും ഒരുമിച്ച് പരീക്ഷിക്കുന്നതിന് മുമ്പ്, ക്ലാസ്സിന് മുന്നിൽ പ്രോജക്റ്റ് നടത്തുന്ന മാതൃക. വിദ്യാർത്ഥികളെ ഒരു സ്ഥലത്ത് ഒരുമിച്ചുകൂട്ടുക, സ്പീഡ്ബോട്ട് തറയിൽ വച്ചാൽ അതിന് നീങ്ങാൻ മതിയായ ഇടം നൽകുക.
-
വിദ്യാർത്ഥികളോട് പറയുക, ഇനി അവരുടെ പ്രോജക്റ്റ് നടത്താനുള്ള ഊഴമാണ്. അവയ്ക്ക് വ്യക്തമായ പാതയുണ്ടെന്നും സ്പീഡ്ബോട്ടുകളൊന്നും പരസ്പരം കൂട്ടിയിടിക്കുന്നില്ലെന്നും ഉറപ്പാക്കുക.
-
വിദ്യാർത്ഥികളെ അവരുടെ പ്രോജക്ടുകൾ പ്രവർത്തിക്കുമ്പോൾ അവ സംരക്ഷിക്കാൻ ഓർമ്മിപ്പിക്കുക. VEX ലൈബ്രറിയിലെ ഈ വിഭാഗം (പൈത്തൺ) VEXcode V5 ലെ സേവിംഗ് രീതികൾ വിശദീകരിക്കുന്നു.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി സ്പീഡ്ബോട്ട് റോബോട്ടിൽ പ്രോജക്റ്റ് (പൈത്തൺ) പ്രവർത്തിപ്പിക്കുക, തുടർന്ന് റോബോട്ട് ബ്രെയിനിലെറൺബട്ടൺ അമർത്തുക.
ഘട്ടം 4: ഇടത്തേക്ക് തിരിയുക
ഇപ്പോൾ നിങ്ങൾ റോബോട്ടിനെ വലത്തേക്ക് തിരിയാൻ പ്രോഗ്രാം ചെയ്തു കഴിഞ്ഞു, നമുക്ക് അത് ഇടത്തേക്ക് തിരിയാൻ പ്രോഗ്രാം ചെയ്യാം.
-
നിർദ്ദേശത്തിലെ പാരാമീറ്റർRIGHTന് പകരംLEFTപ്രദർശിപ്പിക്കുന്നതിന് മാറ്റുക, അങ്ങനെ നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ കാണപ്പെടും:
# ലൈബ്രറി vex import ൽ നിന്ന് ഇറക്കുമതി ചെയ്യുന്നു * # പ്രോജക്റ്റ് കോഡ് drivetrain.turn_for (LEFT, 90, DEGREES) ആരംഭിക്കുക - ൽ നിന്ന് തിരിക്കുക തിരിക്കുക ഇടത്മാറ്റാൻ പ്രോജക്റ്റ് നാമം തിരഞ്ഞെടുക്കുക.
- ഒരു പുതിയ സ്ലോട്ട് തിരഞ്ഞെടുക്കാൻ സ്ലോട്ട് ഐക്കൺ തിരഞ്ഞെടുക്കുക. സ്ലോട്ട് 2 തിരഞ്ഞെടുക്കുക.
- (പൈത്തൺ) പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യുക.
- റോബോട്ട് ബ്രെയിനിന്റെ സ്ക്രീൻ നോക്കി നിങ്ങളുടെ പ്രോജക്റ്റ് (പൈത്തൺ) ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. സ്ലോട്ട് 2-ൽ TurnLeft എന്ന പ്രോജക്റ്റ് നാമം ലിസ്റ്റ് ചെയ്തിരിക്കണം.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക (പൈത്തൺ), തുടർന്ന്റൺബട്ടൺ അമർത്തുക.
ഘട്ടം 5: കാത്തിരുന്ന് ഇടത്തേക്ക് തിരിയുക
ഇപ്പോൾ നമ്മൾ റോബോട്ടിനെ ഇടത്തേക്ക് വലത്തേക്ക് തിരിഞ്ഞ് ഇടത്തേക്ക് തിരിഞ്ഞ് പ്രോഗ്രാം ചെയ്തിരിക്കുന്നു, ഇനി നമുക്ക് ഒരു wait നിർദ്ദേശം ചേർക്കാൻ കഴിയും, അങ്ങനെ റോബോട്ട് ഇടത്തേക്ക് തിരിയുന്നതിന് മുമ്പ് ഒരു നിശ്ചിത സമയം കാത്തിരുന്ന് പ്രവർത്തിക്കും.
-
drive_for കമാൻഡിന് മുമ്പ് ഒരു wait നിർദ്ദേശം ചേർക്കുക. wait , drive_for കമാൻഡുമായി പൊരുത്തപ്പെടുന്നതിന് ഇൻഡന്റ് ചെയ്തിട്ടുണ്ടെന്നും എല്ലാ കമാൻഡുകളും “Begin project code” കമന്റിന് താഴെയാണെന്നും ഉറപ്പാക്കുക. ഇത് റോബോട്ടിനോട് മൂന്ന് സെക്കൻഡ് കാത്തിരിക്കാനും പിന്നീട് റിവേഴ്സ് ഡ്രൈവ് ചെയ്യാനും പറയുന്നു.
# പ്രോജക്റ്റ് കോഡ് ആരംഭിക്കുക കാത്തിരിക്കുക(3, സെക്കൻഡ്) ഡ്രൈവ്ട്രെയിൻ.turn_for(ഇടത്, 90, ഡിഗ്രി) - TurnLeft ൽ നിന്ന് WaitLeftആയി മാറ്റാൻ പ്രോജക്റ്റ് നാമം തിരഞ്ഞെടുക്കുക.
- ഒരു പുതിയ സ്ലോട്ട് തിരഞ്ഞെടുക്കാൻ സ്ലോട്ട് ഐക്കൺ തിരഞ്ഞെടുക്കുക. സ്ലോട്ട് 3 തിരഞ്ഞെടുക്കുക.
- (പൈത്തൺ) പ്രോജക്റ്റ് ഡൗൺലോഡ് ചെയ്യുക.
- റോബോട്ട് ബ്രെയിനിന്റെ സ്ക്രീൻ നോക്കി നിങ്ങളുടെ പ്രോജക്റ്റ് (പൈത്തൺ) ഡൗൺലോഡ് ചെയ്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കുക. സ്ലോട്ട് 3-ൽ WaitLeft എന്ന പ്രോജക്റ്റ് നാമം ലിസ്റ്റ് ചെയ്തിരിക്കണം.
- പ്രോജക്റ്റ് തിരഞ്ഞെടുത്തിട്ടുണ്ടെന്ന് ഉറപ്പാക്കി റോബോട്ടിൽ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക (പൈത്തൺ), തുടർന്ന്റൺബട്ടൺ അമർത്തുക.
ഘട്ടം 6: സുരക്ഷാ ക്യാമറ ചലഞ്ച് പൂർത്തിയാക്കുക!

സെക്യൂരിറ്റി ക്യാമറ ചലഞ്ചിൽ, റോബോട്ട് 90 ഡിഗ്രി വലത്തേക്ക് തിരിഞ്ഞാണ് ആരംഭിക്കേണ്ടത്. പിന്നീട് റോബോട്ട് ഒരു സുരക്ഷാ ക്യാമറ പോലെ ഇടത്തോട്ടും പിന്നെ വലത്തോട്ടും 180 ഡിഗ്രി "സ്കാൻ" ചെയ്യും. പിന്നീട് റോബോട്ട് 180 ഡിഗ്രി ഇടത്തോട്ടും 180 ഡിഗ്രി വലത്തോട്ടും രണ്ടുതവണ തിരിയുന്നത് ആവർത്തിക്കും. അങ്ങനെ, റോബോട്ട് ആകെ 180 ഡിഗ്രി മൂന്ന് തവണ സ്കാൻ ചെയ്യും.
റോബോട്ട് പ്രോഗ്രാം ചെയ്യുന്നതിനുമുമ്പ്, നിങ്ങളുടെ എഞ്ചിനീയറിംഗ് നോട്ട്ബുക്കിൽ റോബോട്ടിന്റെ പാതയും പെരുമാറ്റരീതികളും ആസൂത്രണം ചെയ്യുക.
സുരക്ഷാ ക്യാമറ ചലഞ്ച് പൂർത്തിയാക്കിയ ശേഷം, കൂടുതൽ വിപുലമായ വെല്ലുവിളികൾ പൂർത്തിയാക്കുന്നതിന് നിങ്ങൾക്ക് മുന്നോട്ടും പിന്നോട്ടും ചലനങ്ങൾ അധിക റോബോട്ട് പെരുമാറ്റരീതികളുമായി സംയോജിപ്പിക്കാൻ കഴിയും.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
ടീച്ചർ ടൂൾബോക്സ്
-
പരിഹാരം
താഴെ ഒരു സാമ്പിൾ പരിഹാരം കാണുക:
# ലൈബ്രറി vex import ൽ നിന്ന്
ഇറക്കുമതി ചെയ്യുന്നു *
# പ്രോജക്റ്റ് കോഡ്
ആരംഭിക്കുക # റോബോട്ട് 90 ഡിഗ്രി വലത്തേക്ക് തിരിക്കും
drivetrain.turn_for(RIGHT, 90, DEGREES)
# റോബോട്ട് 180 ഡിഗ്രി ഇടത്തേക്ക് തിരിക്കും
drivetrain.turn_for(LEFT, 180, DEGREES)
# റോബോട്ട് 180 ഡിഗ്രി വലത്തേക്ക് തിരിക്കും
drivetrain.turn_for(RIGHT, 180, DEGREES)
# റോബോട്ട് 180 ഡിഗ്രി ഇടത്തേക്ക് തിരിക്കും
drivetrain.turn_for(LEFT, 180, DEGREES)
# റോബോട്ട് 180 ഡിഗ്രി വലത്തേക്ക് തിരിക്കും
drivetrain.turn_for(RIGHT, 180, DEGREES)
# റോബോട്ട് 180 ഡിഗ്രി ഇടത്തേക്ക് തിരിക്കും
drivetrain.turn_for(LEFT, 180, DEGREES)
# റോബോട്ട് 180 ഡിഗ്രി വലത്തേക്ക് തിരിക്കും
ഡ്രൈവ്ട്രെയിൻ.ടേൺ_ഫോർ(വലത്, 180, ഡിഗ്രി)