
Pemrograman Belok Kanan dan Kiri - Python
Speedbot siap berputar!
Eksplorasi ini akan memberi Anda alat untuk dapat mulai membuat beberapa proyek menarik yang dapat diikuti oleh Speedbot Anda.
- Instruksi Python VEXcode V5 yang akan digunakan dalam eksplorasi ini:
- drivetrain.turn_for(KANAN, 90, DERAJAT)
-
Untuk mengetahui informasi lebih lanjut tentang instruksi, pilih Bantuan lalu pilih ikon tanda tanya di samping perintah untuk melihat informasi lebih lanjut.

- Pastikan Anda telah mengunduh dan menyiapkan perangkat keras yang diperlukan, buku catatan teknik, dan VEXcode V5.
| Kuantitas | Bahan-bahan yang Dibutuhkan |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Baterai Robot Terisi |
| 1 |
Kode VEX V5 |
| 1 |
Kabel USB (jika menggunakan komputer) |
| 1 |
Buku Catatan Teknik |
Langkah 1: Persiapan Eksplorasi
Sebelum Anda memulai kegiatan, apakah Anda sudah menyiapkan masing-masing barang ini?
- Apakah semua motorterpasang keport yang benar?
- Apakah kabel pintardimasukkan sepenuhnyake semua motor?
- Apakah Otakdihidupkan?
- Apakah bateraiterisi?
Langkah 2: Mulai Proyek Baru
Selesaikan langkah-langkah berikut untuk memulai proyek:
-
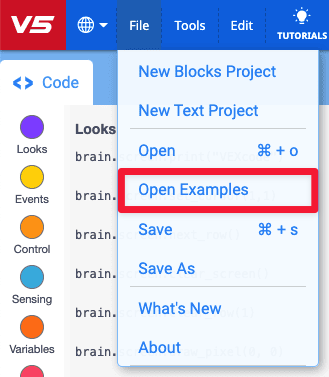
Buka menu File dan pilih Buka Contoh.
-
Pilih dan buka proyek templat Speedbot (Drivetrain 2-motor, Tanpa Gyro). Proyek templat berisi konfigurasi motor. Jika templat tidak digunakan, robot Anda tidak akan menjalankan proyek dengan benar.

-
Karena Anda akan mengerjakan putaran Speedbot, Anda akan memberi nama proyek AndaPutaran.

-
Setelah selesai, pilihSimpan.

 Tips Guru
Tips Guru
Nama Proyek dapat memiliki spasi di antara atau setelah kata-kata.
Langkah 3: Belok Kanan
Anda sekarang siap untuk mulai memprogram robot untuk berbelok kanan!
-
Tambahkan instruksi ke proyek, sehingga proyek Anda tampak seperti ini:
# Perpustakaan mengimpor dari vex import * # Mulai kode proyek drivetrain.turn_for(KANAN, 90, DERAJAT) - Pilih ikon Slot untuk memilih salah satu dari delapan slot yang tersedia di Robot Brain dan pilih slot 1.
- Hubungkan V5 Robot Brain ke komputer menggunakan kabel micro USB dan nyalakan V5 Robot Brain. Ikon Otak pada bilah alatberubah menjadi hijausetelah koneksi berhasil dibuat.
- Saat V5 Robot Brain terhubung ke komputer, ikon Bangun berubah menjadi ikon Unduh. PilihUnduhuntuk mengunduh proyek ke Brain.
 Kotak Peralatan Guru
Kotak Peralatan Guru
Ingatkan siswa untuk melepaskan kabel USB dari Robot Brain. Menghubungkan robot ke komputer saat menjalankan proyek dapat menyebabkan robot menarik kabel koneksi.
Kotak Alat Guru
-
Berhenti dan Diskusikan
Minta siswa untuk memprediksi apa yang menurut mereka akan terjadi ketika proyek ini diunduh dan dijalankan di Speedbot. Mintalah siswa untuk mencatat prediksi mereka di buku catatan teknik mereka. Jika waktu memungkinkan, mintalah setiap kelompok untuk berbagi prediksi mereka.
-
Periksa untuk memastikan proyek Anda telah diunduh (Python) dengan melihat layar Robot Brain. Nama proyek Turn harus dicantumkan di Slot 1.

Kotak Alat Guru
-
Model Pertama
-
Model menjalankan proyek di depan kelas sebelum meminta semua siswa mencobanya sekaligus. Kumpulkan siswa di satu area dan sisakan cukup ruang bagi Speedbot untuk bergerak jika diletakkan di lantai.
-
Beritahukan siswa bahwa sekarang giliran mereka untuk menjalankan proyek mereka. Pastikan mereka memiliki jalur yang jelas dan tidak ada Speedbot yang bertabrakan satu sama lain.
-
Ingatkan siswa untuk menyimpan proyek mereka saat mereka mengerjakannya. Bagian ini (Python) dari Pustaka VEX menjelaskan praktik penyimpanan di VEXcode V5.
- Jalankan proyek (Python) pada robot Speedbot dengan memastikan proyek dipilih lalu tekan tombolJalankanpada Robot Brain.
Langkah 4: Belok Kiri
Sekarang Anda telah memprogram robot Anda untuk berbelok ke kanan, mari kita memprogramnya untuk berbelok ke kiri.
-
Ubah parameter dalam instruksi untuk menampilkanKIRIbukannyaKANAN, sehingga proyek Anda tampak seperti ini:
# Perpustakaan mengimpor dari vex import * # Mulai kode proyek drivetrain.turn_for(LEFT, 90, DEGREES) - Pilih Nama Proyek untuk mengubahnya dari Belok menjadi Belok Kiri.
- Pilih ikon Slot untuk memilih slot baru. Pilih slot 2.
- Unduh (Python) proyeknya.
- Periksa untuk memastikan proyek Anda telah diunduh (Python) dengan melihat layar Robot Brain. Nama proyek TurnLeft harus dicantumkan di Slot 2.
- Jalankan (Python) proyek pada robot dengan memastikan proyek dipilih lalu tekan tombolJalankan.
Langkah 5: Tunggu lalu Belok Kiri
Sekarang setelah kita memprogram robot untuk berbelok kiri ke kanan lalu berbelok kiri, kita sekarang dapat menambahkan instruksi tunggu sehingga robot menunggu sejumlah waktu tertentu sebelum berbelok kiri.
-
Tambahkan instruksi wait sebelum perintah drive_for . Pastikan wait diberi indentasi agar sesuai dengan perintah drive_for dan semua perintah berada di bawah komentar “Mulai kode proyek”. Ini memberi tahu robot untuk menunggu tiga detik sebelum bergerak mundur.
# Mulai kode proyek tunggu(3, DETIK) drivetrain.putar_untuk(KIRI, 90, DERAJAT) - Pilih Nama Proyek untuk mengubahnya dari TurnLeft menjadi WaitLeft.
- Pilih ikon Slot untuk memilih slot baru. Pilih slot 3.
- Unduh (Python) proyeknya.
- Periksa untuk memastikan proyek Anda telah diunduh (Python) dengan melihat layar Robot Brain. Nama proyek WaitLeft harus dicantumkan di Slot 3.
- Jalankan (Python) proyek pada robot dengan memastikan proyek dipilih lalu tekan tombolJalankan.
Langkah 6: Selesaikan Tantangan Kamera Keamanan!

Dalam Tantangan Kamera Keamanan, robot harus mulai dengan berbelok ke kanan 90 derajat. Robot tersebut kemudian akan berputar ke kiri 180 derajat, lalu ke kanan 180 derajat, “memindai” seperti kamera keamanan. Robot kemudian akan mengulang putaran 180 derajat ke kiri dan 180 derajat ke kanan dua kali lagi. Dengan demikian, robot akan memindai 180 derajat sebanyak tiga kali secara total.
Sebelum memprogram robot, rencanakan lintasan dan perilaku robot di buku catatan teknik Anda.
Setelah menyelesaikan Tantangan Kamera Keamanan, Anda akan dapat menggabungkan gerakan maju dan mundur dengan perilaku robot tambahan untuk menyelesaikan tantangan yang lebih sulit lagi.
Kotak Alat Guru
-
Solusi
Lihat contoh solusi di bawah ini:
Bahasa Indonesia: # Library mengimpor
dari vex import *
# Kode proyek awal
# Robot akan berbelok ke kanan 90 derajat
drivetrain.turn_for(KANAN, 90, DERAJAT)
# Robot akan berbelok ke kiri 180 derajat
drivetrain.turn_for(KIRI, 180, DERAJAT)
# Robot akan berbelok ke kanan 180 derajat
drivetrain.turn_for(KANAN, 180, DERAJAT)
# Robot akan berbelok ke kiri 180 derajat
drivetrain.turn_for(KIRI, 180, DERAJAT)
# Robot akan berbelok ke kanan 180 derajat
drivetrain.turn_for(KANAN, 180, DERAJAT)
# Robot akan berbelok ke kiri 180 derajat
drivetrain.turn_for(KIRI, 180, DERAJAT)
# Robot akan berbelok ke kanan 180 derajat derajat
drivetrain.turn_for(KANAN, 180, DERAJAT)