
Lektion 1: Der Augensensor und das Problem des Scheibenlabyrinths
Verwenden von Augensensordaten mit dem Disk-Labyrinth-Problem
Die Augensensoren am VR-Roboter sind vielseitig einsetzbar. Beachten Sie, dass der Down Eye Sensor den Boden eines Spielplatzes nicht als Objekt erkennt. Andere Elemente, wie z. B. Festplatten, werden als Objekte registriert. Der Front Eye Sensor erkennt Wände auf den Spielplätzen sowie erhöhte Objekte wie Scheiben oder Schlösser.
Die Augensensoren können die Farbe eines Objekts in der Nähe des Sensors erkennen, z. B. die farbigen Scheiben im Disk Maze Playground. Dies ist nützlich, wenn Sie möchten, dass der VR-Roboter unterschiedlich gefärbte Objekte sortiert, zu einem spezifisch gefärbten Objekt fährt oder verschiedene Verhaltensweisen basierend auf der Farbe eines erkannten Objekts ausführt.
In diesem Projekt fährt der VR-Roboter beispielsweise zur ersten grünen Festplatte im Disk Maze und dreht sich dann zur nächsten Festplatte.
def main():
while not front_eye.detect(GREEN):
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)Sehen Sie sich das Video hier an, um zu sehen, wie der VR-Roboter vorwärts fährt, während der Front Eye Sensor kein grünes Objekt erkennt. Sobald ein grünes Objekt erkannt wird, dreht sich der VR-Roboter nach rechts.
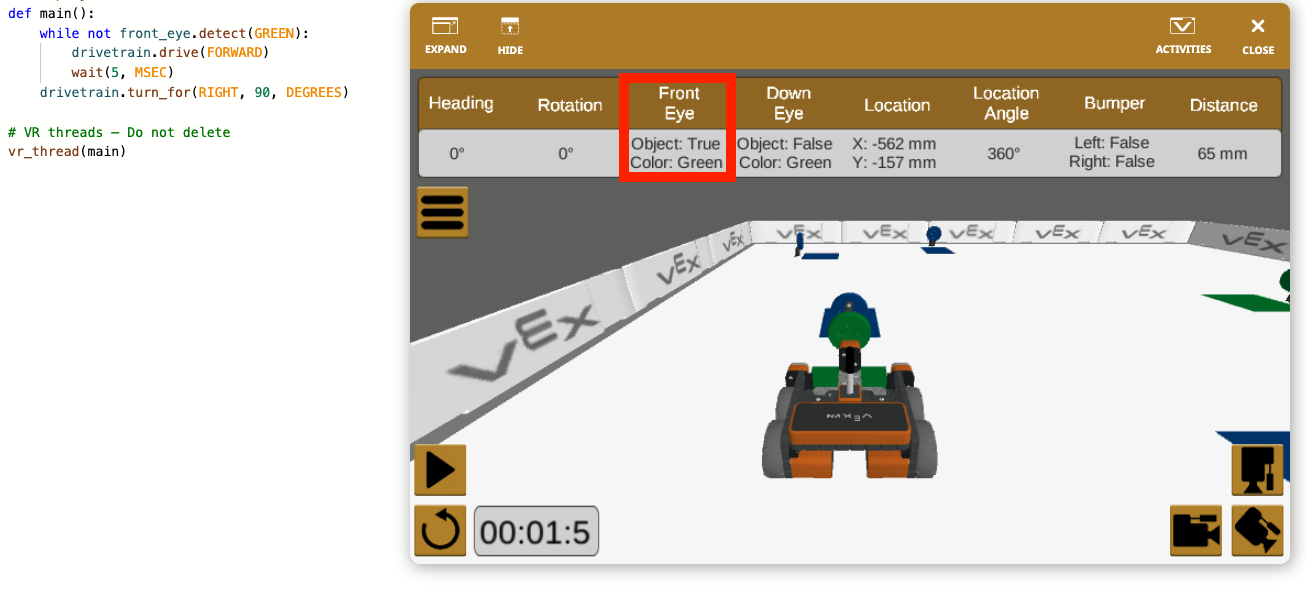
Die Daten des Front Eye Sensors und des Down Eye Sensors werden in Echtzeit im Dashboard gemeldet, während das Projekt läuft. Beachten Sie, dass der Front Eye Sensor sowohl das Objekt (die Festplatte) als auch die Farbe (grün) erkennt, wenn es sich der Festplatte nähert.
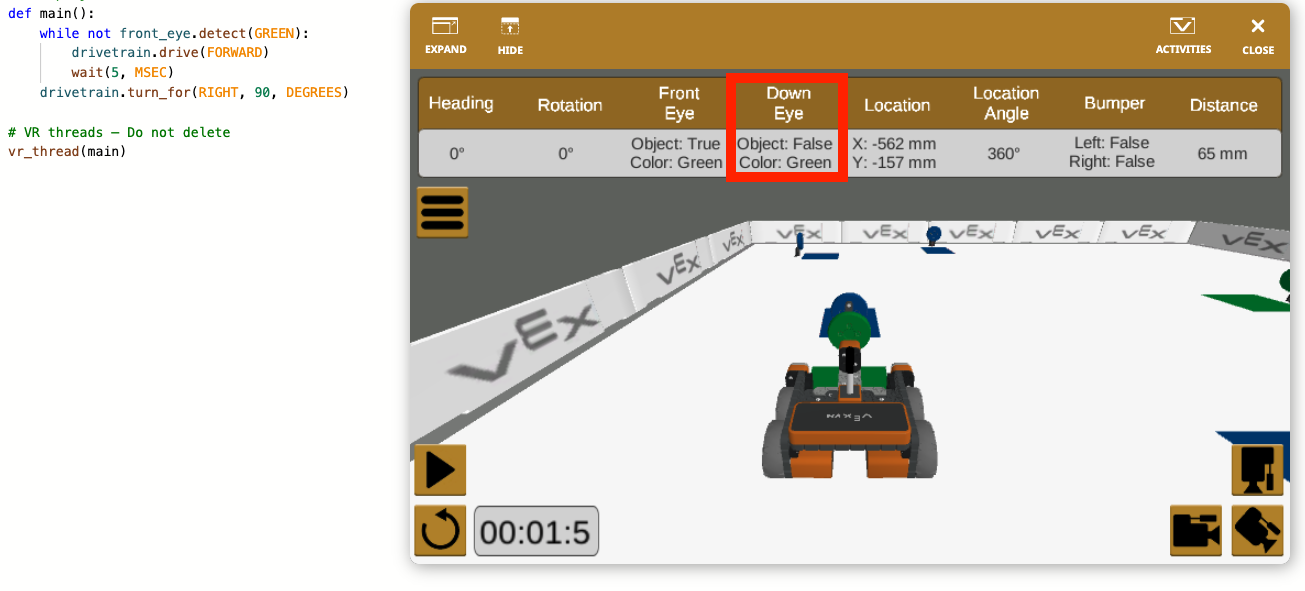
Der Down Eye Sensor erkennt die Farbe des Bodens (grün), aber da sich kein Objekt auf dem Boden des Spielplatzes befindet, wird dieser Wert als Falsch gemeldet.
Sie können die im Dashboard gemeldeten Daten jederzeit verwenden, um die Daten, die die Augensensoren melden, in Echtzeit zu visualisieren.
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf