
Lezione 1: Il sensore oculare e il problema del labirinto del disco
Utilizzo dei dati del sensore oculare con il problema del labirinto del disco
I sensori oculari sul robot VR possono essere utilizzati in molti modi. Si noti che il sensore Down Eye non rileva il pavimento di un parco giochi come oggetto. Altri elementi, come i dischi, verranno registrati come oggetti. Il sensore per gli occhi anteriori rileva le pareti nei parchi giochi, nonché gli oggetti in rilievo, come dischi o castelli.
Gli Eye Sensor possono rilevare il colore di un oggetto vicino al sensore, come i dischi colorati nel Disk Maze Playground. Ciò è utile se si desidera che il robot VR ordini oggetti di colore diverso, si avvicini a un oggetto di colore specifico o esegua comportamenti diversi in base al colore di un oggetto rilevato.
Ad esempio, in questo progetto, il robot VR guiderà verso il primo disco verde nel labirinto di dischi, quindi si girerà verso il disco successivo.
def main():
while not front_eye.detect(GREEN):
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)Guarda il video qui per vedere il robot VR avanzare mentre il sensore dell'occhio anteriore non rileva un oggetto verde. Una volta rilevato un oggetto verde, il robot VR gira a destra.
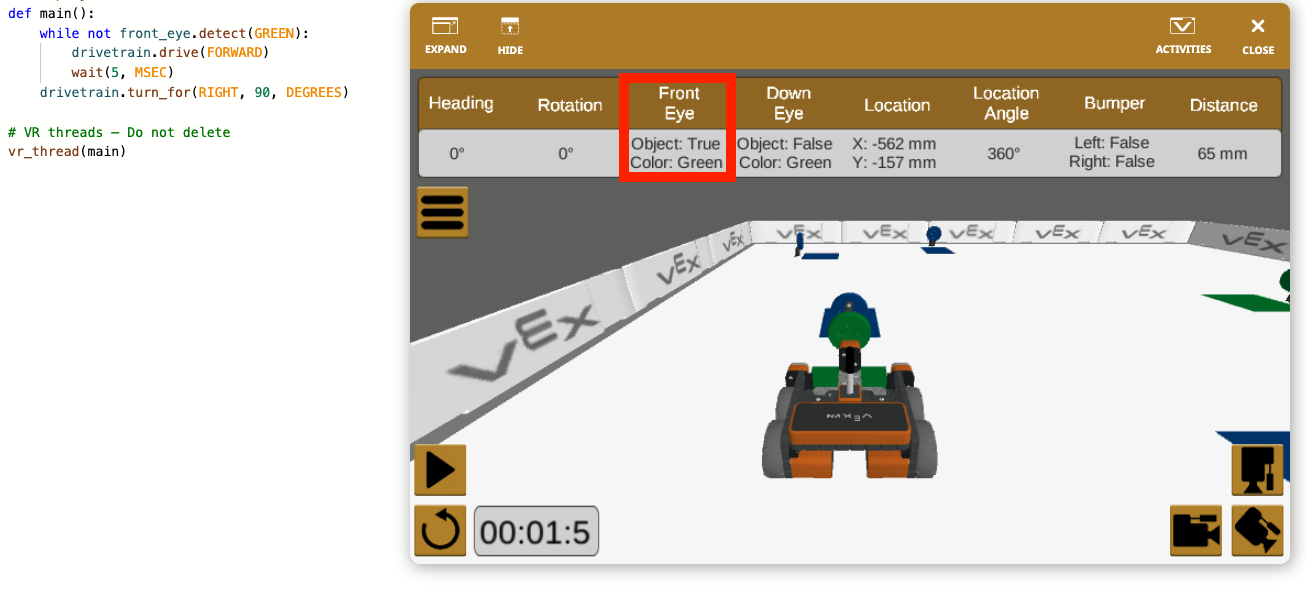
I dati del Front Eye Sensor e del Down Eye Sensor sono riportati in Dashboard in tempo reale, mentre il progetto è in esecuzione. Si noti che il sensore dell'occhio anteriore rileva sia l'oggetto (il disco) che il colore (verde) quando si avvicina al disco.
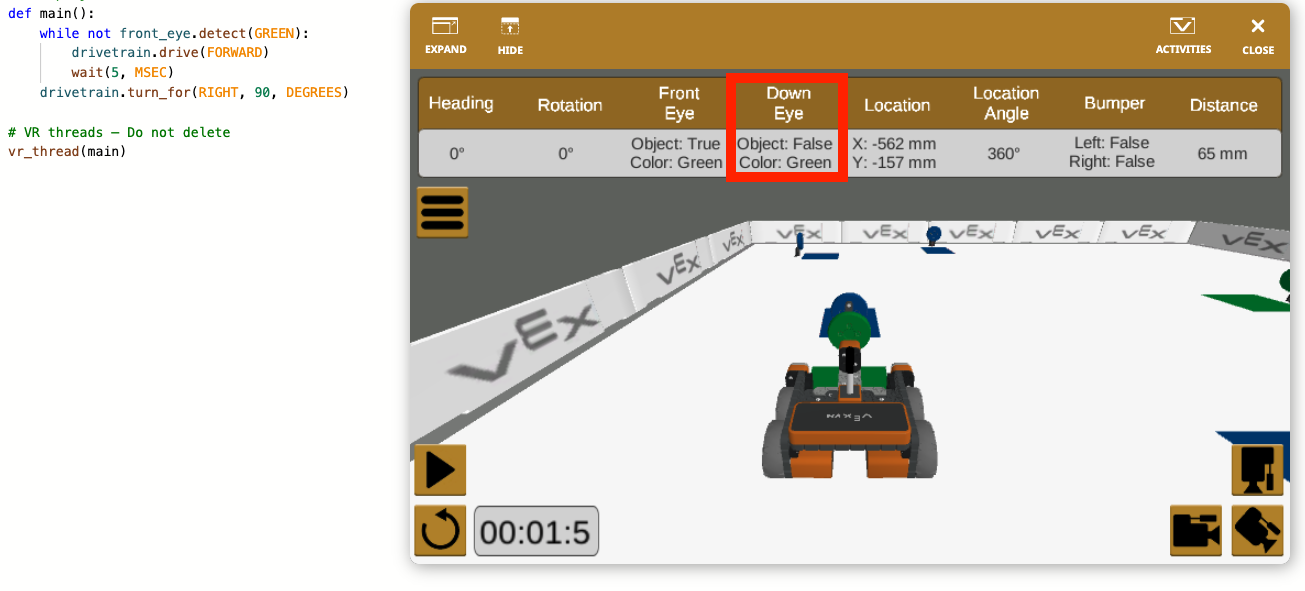
Il sensore Down Eye rileva il colore del pavimento (verde), ma poiché non c'è un oggetto sul pavimento del parco giochi, tale valore viene riportato come False.
È possibile utilizzare i dati riportati nella Dashboard in qualsiasi momento per aiutare a visualizzare i dati che gli Eye Sensor stanno segnalando in tempo reale.