
수업 1: 눈 센서와 디스크 미로 문제
디스크 미로 문제에 눈 센서 데이터 사용
VR 로봇의 눈 센서는 다양한 방법으로 활용될 수 있습니다. 다운 아이 센서는 놀이터의 바닥을 물체로 감지하지 않는다는 점에 유의하세요. 디스크와 같은 다른 항목은 객체로 등록됩니다. 프런트 아이 센서는 놀이터의 벽은 물론, 원반이나 성 같은 높은 물체도 감지합니다.
눈 센서는 센서 근처에 있는 물체의 색상을 감지할 수 있습니다. 예를 들어 디스크 미로 놀이터의 색깔 있는 디스크가 그렇습니다. 이 기능은 VR 로봇이 다양한 색상의 물체를 분류하거나, 특정 색상의 물체로 이동하거나, 감지된 물체의 색상에 따라 다른 행동을 수행하도록 하려는 경우에 유용합니다.
예를 들어, 이 프로젝트에서 VR 로봇은 디스크 미로의 첫 번째 녹색 디스크로 이동한 다음, 다음 디스크를 마주보도록 방향을 바꿉니다.
def main():
while not front_eye.detect(GREEN):
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)여기 영상을 시청하면 VR 로봇이 전방 눈 센서가 녹색 물체를 감지 동안 앞으로 나아가는 모습을 볼 수 있습니다. 녹색 물체가 감지되면 VR 로봇이 오른쪽으로 회전합니다.
비디오 파일
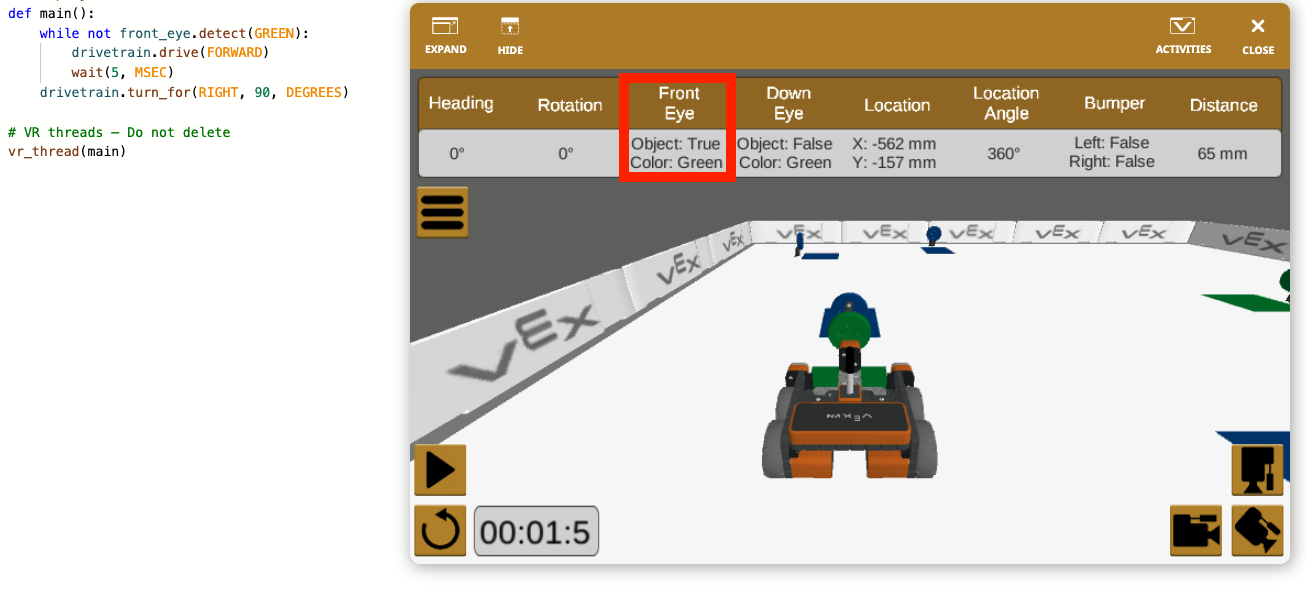
프로젝트가 실행되는 동안, 전방 눈 센서와 하향 눈 센서의 데이터가 대시보드에 실시간으로 보고됩니다. 프론트 아이 센서는 물체(디스크)와 디스크에 접근하는 색상(녹색)을 모두 감지한다는 점에 주목하세요.
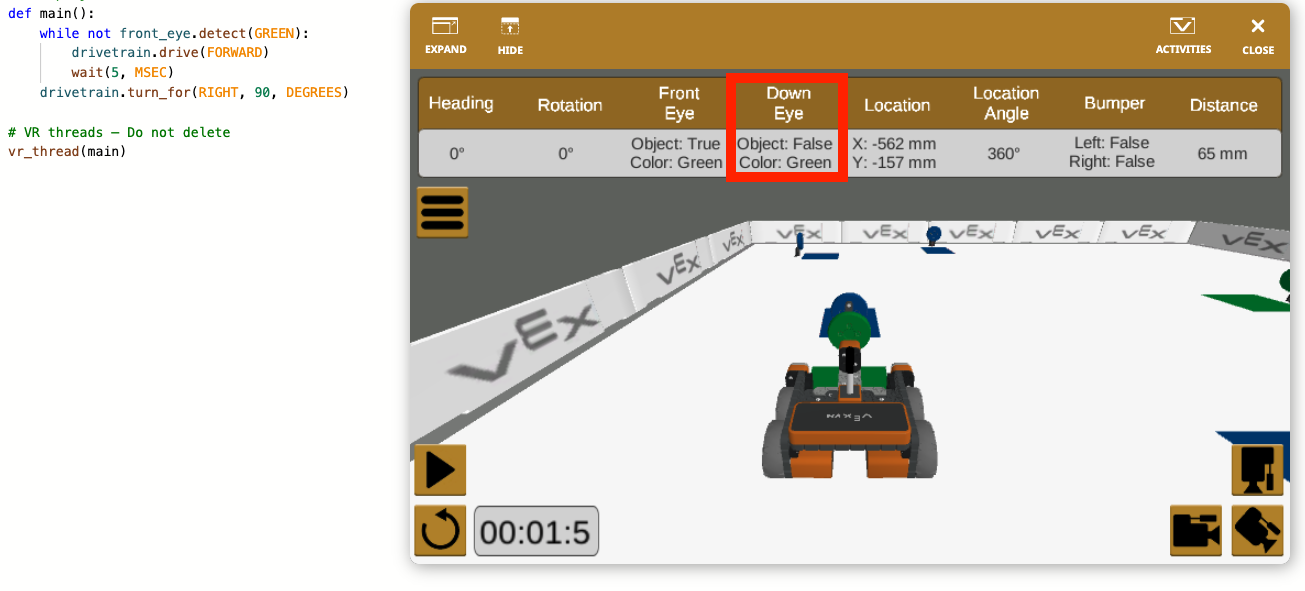
다운 아이 센서는 바닥의 색상(녹색)을 감지하지만, 놀이터 바닥에 물체가 없으므로 해당 값은 False로 보고됩니다.
대시보드에 보고된 데이터를 언제든지 활용하여 Eye Sensors가 실시간으로 보고하는 데이터를 시각화할 수 있습니다.