
Leçon 1 : Le capteur oculaire et le problème du labyrinthe de disques
Utilisation des données des capteurs oculaires avec le problème du labyrinthe de disques
Les capteurs oculaires du robot VR peuvent être utilisés de nombreuses façons. Notez que le capteur Down Eye ne détecte pas le sol d'une aire de jeux en tant qu'objet. D'autres éléments, tels que les disques, seront enregistrés en tant qu'objets. Le capteur oculaire frontal détecte les murs dans les aires de jeux, ainsi que les objets surélevés, comme les disques ou les châteaux.
Les capteurs oculaires peuvent détecter la couleur d'un objet à proximité du capteur, comme les disques colorés dans le terrain de jeu du labyrinthe de disques. Ceci est utile si vous souhaitez que le robot VR trie des objets de couleurs différentes, se dirige vers un objet de couleur spécifique ou adopte différents comportements en fonction de la couleur d'un objet détecté.
Par exemple, dans ce projet, le robot VR se dirigera vers le premier disque vert du labyrinthe de disques, puis se tournera pour faire face au disque suivant.
def main() :
while not front_eye.detect(GREEN) :
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)Watch the video here to see the VR Robot drive forward while the Front Eye Sensor does not detect a green object. Une fois qu'un objet vert est détecté, le robot VR tourne à droite.
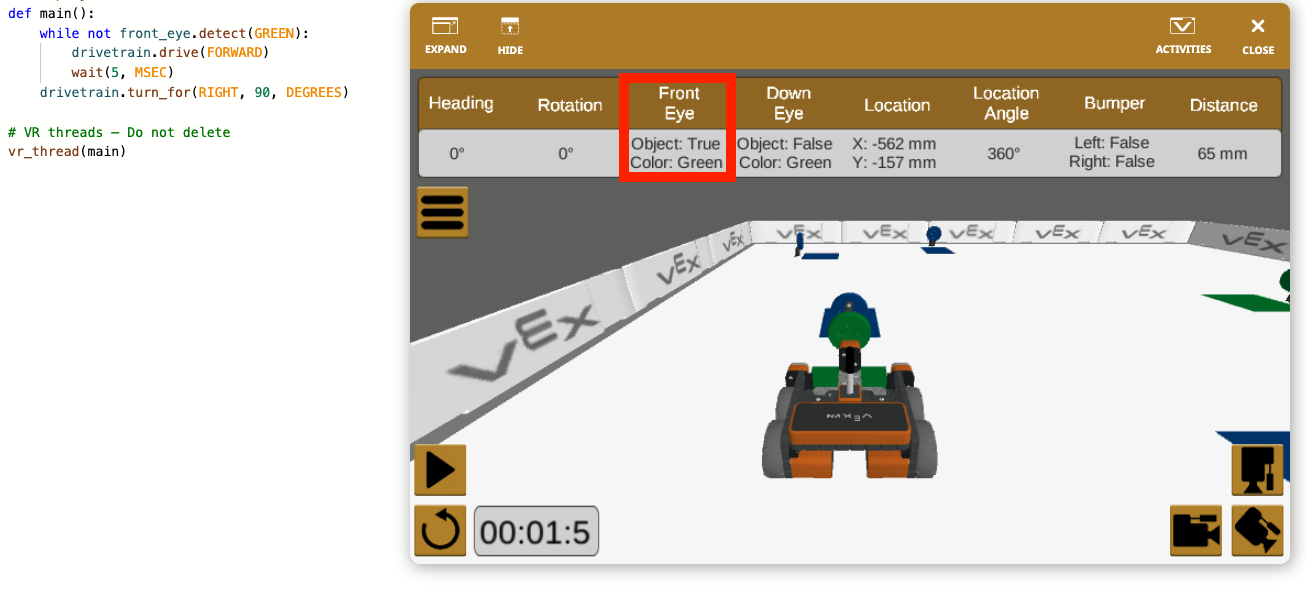
Les données du capteur oculaire avant et du capteur oculaire bas sont rapportées dans le tableau de bord en temps réel, au fur et à mesure que le projet est en cours. Notez que le capteur frontal détecte à la fois l'objet (le disque) et la couleur (verte) lorsqu'il s'approche du disque.
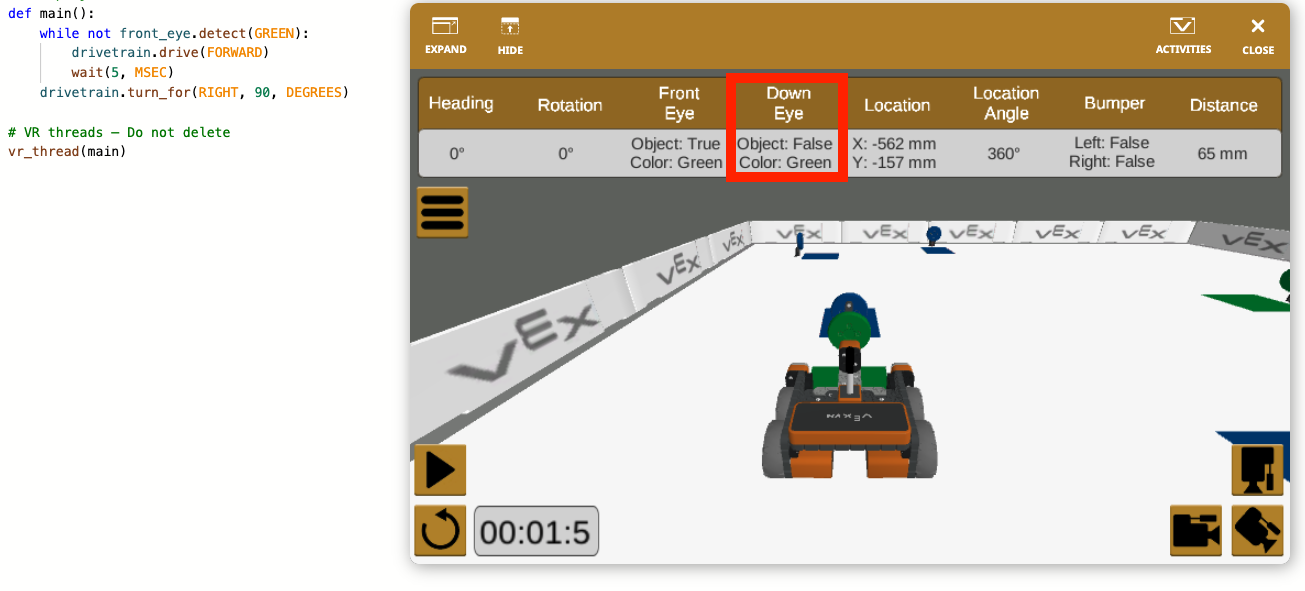
Le capteur Down Eye détecte la couleur du sol (vert), mais comme il n'y a pas d'objet sur le sol du terrain de jeu, cette valeur est signalée comme fausse.
Vous pouvez utiliser les données rapportées dans le tableau de bord à tout moment pour vous aider à visualiser les données que les capteurs oculaires signalent en temps réel.
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf