
Pelajaran 1: Sensor Mata dan Masalah Labirin Cakram
Menggunakan Data Sensor Mata dengan Masalah Labirin Disk
Sensor Mata pada Robot VR dapat digunakan dengan berbagai cara. Perhatikan bahwa Sensor Mata Bawah tidak mendeteksi lantai Taman Bermain sebagai objek. Item lainnya, seperti disk, akan terdaftar sebagai objek. Sensor Mata Depan mendeteksi dinding di Taman Bermain, dan juga objek yang ditinggikan, seperti cakram atau kastil.
Sensor Mata dapat mendeteksi warna suatu objek di dekat sensor, seperti cakram berwarna di Disk Maze Playground. Hal ini berguna jika Anda ingin Robot VR memilah objek-objek dengan warna berbeda, melaju ke objek dengan warna tertentu, atau melakukan perilaku berbeda berdasarkan warna objek yang terdeteksi.
Misalnya, dalam proyek ini, Robot VR akan melaju ke cakram hijau pertama di Cakram Labirin, lalu berbalik menghadap cakram berikutnya.
def main():
sementara tidak front_eye.detect(GREEN):
drivetrain.drive(MAJU)
tunggu(5, MSEC)
drivetrain.turn_for(KANAN, 90, DERAJAT)Tonton videonya di sini untuk melihat Robot VR melaju ke depan sementara Sensor Mata Depan objek hijau. Setelah objek hijau terdeteksi, Robot VR berbelok ke kanan.
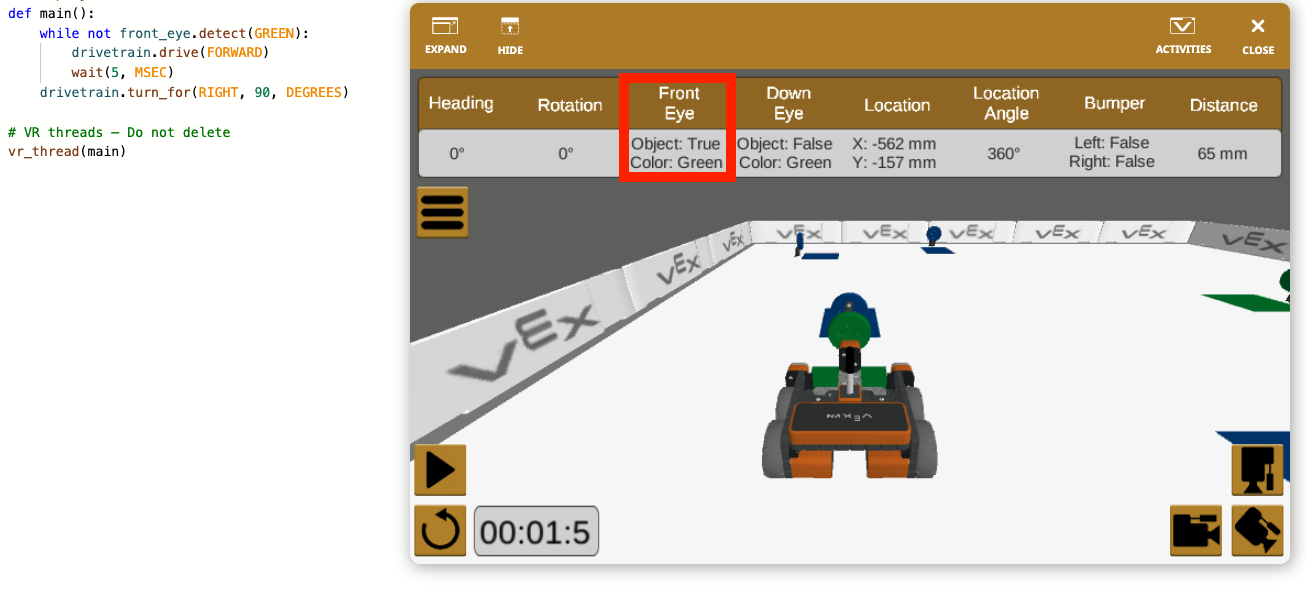
Data dari Front Eye Sensor dan Down Eye Sensor dilaporkan di Dashboard secara real time, saat proyek berjalan. Perhatikan bahwa Sensor Mata Depan mendeteksi objek (cakram) dan warna (hijau) saat mendekati cakram.
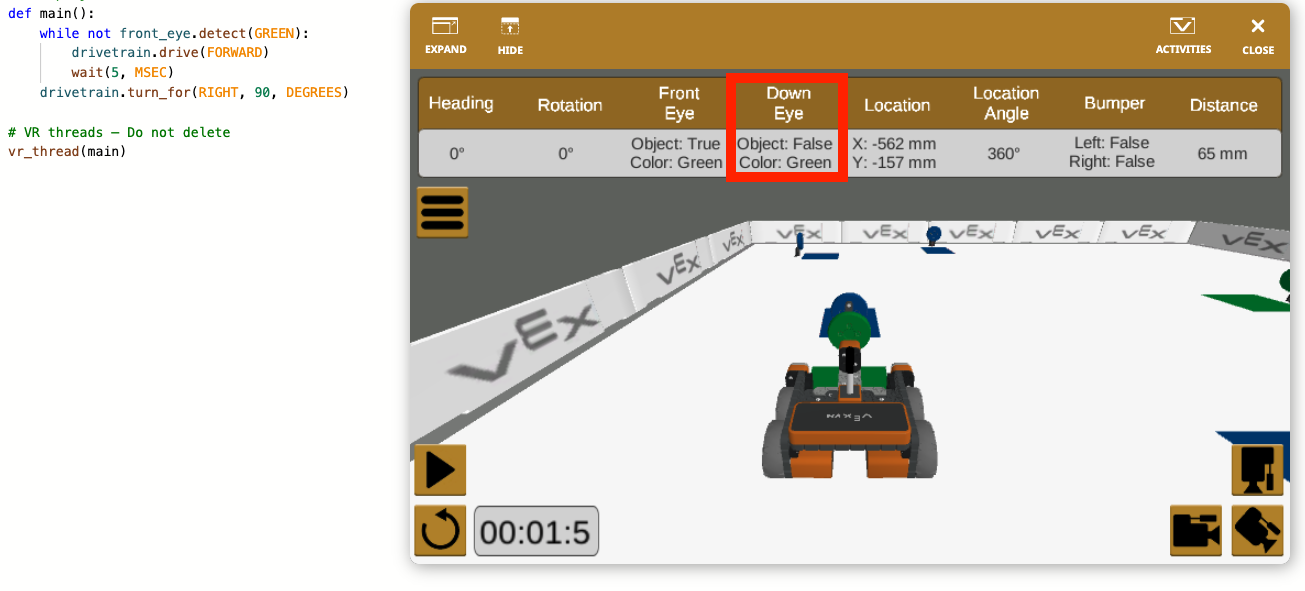
Sensor Mata Bawah mendeteksi warna lantai (hijau), tetapi karena tidak ada objek di lantai Taman Bermain, nilai tersebut dilaporkan sebagai Salah.
Anda dapat menggunakan data yang dilaporkan di Dasbor kapan saja untuk membantu memvisualisasikan data yang dilaporkan Sensor Mata secara real-time.