
पाठ 1: नेत्र संवेदक और डिस्क भूलभुलैया समस्या
डिस्क भूलभुलैया समस्या के साथ नेत्र सेंसर डेटा का उपयोग करना
वी.आर. रोबोट पर लगे नेत्र सेंसर का उपयोग कई तरीकों से किया जा सकता है। ध्यान दें कि डाउन आई सेंसर खेल के मैदान के फर्श को किसी वस्तु के रूप में नहीं पहचानता है। अन्य वस्तुएं, जैसे डिस्क, ऑब्जेक्ट के रूप में पंजीकृत होंगी। फ्रंट आई सेंसर खेल के मैदान में दीवारों के साथ-साथ डिस्क या महल जैसी उभरी हुई वस्तुओं का भी पता लगाता है।
नेत्र सेंसर सेंसर के पास किसी वस्तु के रंग का पता लगा सकते हैं, जैसे कि डिस्क मेज़ प्लेग्राउंड में रंगीन डिस्क। यह तब उपयोगी है जब आप चाहते हैं कि VR रोबोट अलग-अलग रंग की वस्तुओं को छांट ले, किसी विशेष रंग की वस्तु तक पहुंचे, या पहचानी गई वस्तु के रंग के आधार पर अलग-अलग व्यवहार करे।
उदाहरण के लिए, इस परियोजना में, वीआर रोबोट डिस्क भूलभुलैया में पहली हरी डिस्क तक जाएगा, फिर अगली डिस्क की ओर मुड़ जाएगा।
def main():
while not front_eye.detect(GREEN):
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)यहां वीडियो देखें जिसमें आप देख सकते हैं कि वीआर रोबोट आगे की ओर कैसे बढ़ता है, जबकि फ्रंट आई सेंसर हरे रंग की वस्तु का पता लगाने के लिए नहीं बल्कि का उपयोग करता है। जब हरे रंग की वस्तु का पता चलता है, तो वीआर रोबोट दाईं ओर मुड़ जाता है।
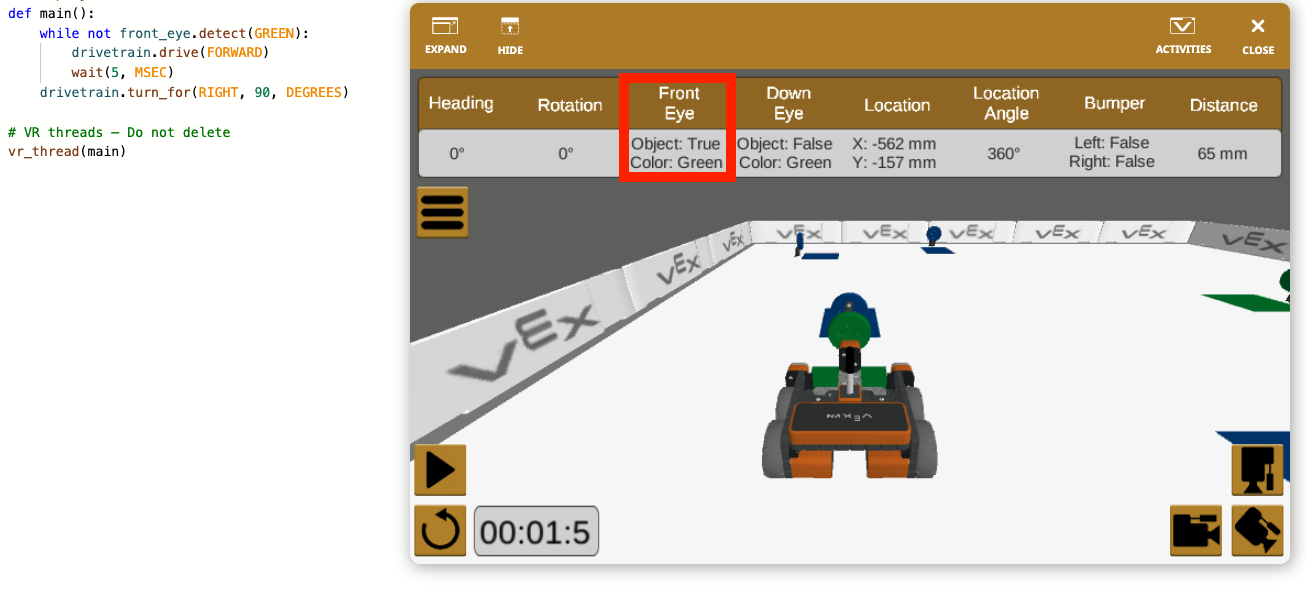
प्रोजेक्ट के चलने के दौरान फ्रंट आई सेंसर और डाउन आई सेंसर से प्राप्त डेटा को डैशबोर्ड में वास्तविक समय में रिपोर्ट किया जाता है। ध्यान दें कि फ्रंट आई सेंसर डिस्क के पास आने पर वस्तु (डिस्क) और रंग (हरा) दोनों का पता लगा लेता है।
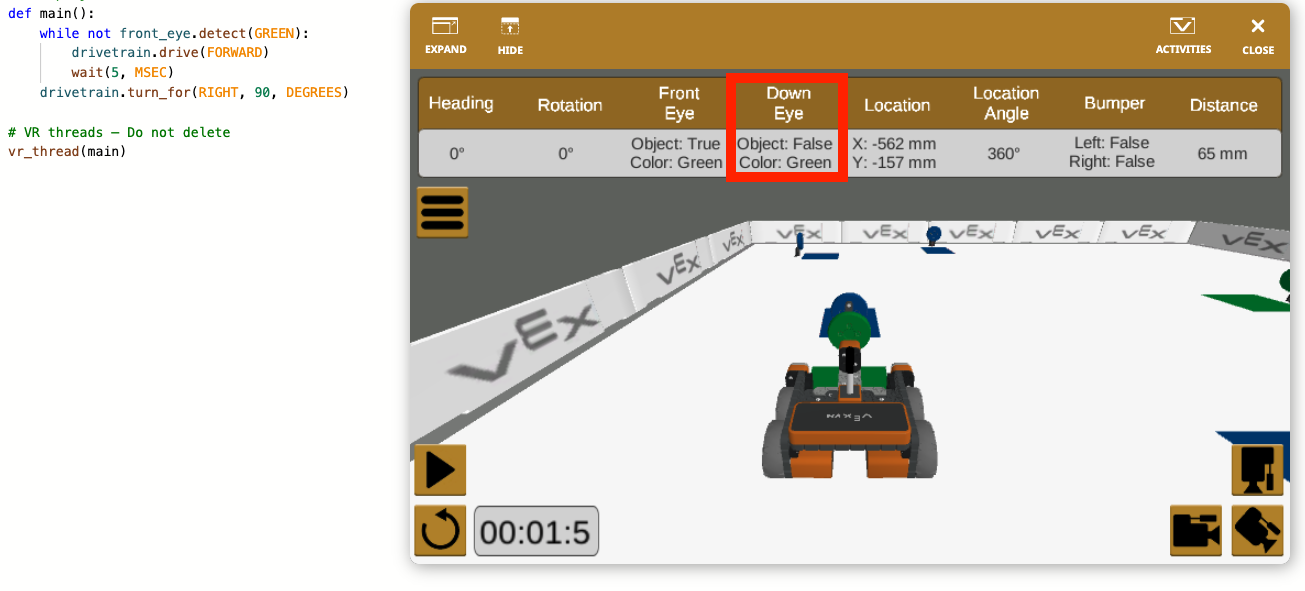
डाउन आई सेंसर फर्श के रंग (हरा) का पता लगाता है, लेकिन चूंकि खेल के मैदान के फर्श पर कोई वस्तु नहीं है, इसलिए उस मान को गलत के रूप में रिपोर्ट किया जाता है।
आप किसी भी समय डैशबोर्ड में रिपोर्ट किए गए डेटा का उपयोग कर सकते हैं, ताकि नेत्र सेंसर द्वारा वास्तविक समय में रिपोर्ट किए जा रहे डेटा को देखने में मदद मिल सके।