
Lektion 1: Was ist ein Abstandssensor?
In dieser Lektion erfahren Sie, was der Abstandssensor ist und warum Sie den Abstandssensor mit einem VR-Roboter verwenden würden. Sie erfahren auch, wie der Abstandssensor funktioniert und wie Sie den Abstandssensor in einem VEXcode VR Python-Projekt verwenden.
Lernergebnisse
- Stellen Sie sicher, dass der Abstandssensor den Abstand zwischen dem Sensor selbst und dem nächstgelegenen Objekt meldet.
- Stellen Sie fest, dass der Abstandssensor die Entfernung bestimmt, indem Sie die Zeit verwenden, die ein Laserlichtimpuls benötigt, um von einem Objekt zu reflektieren und zum Sensor zurückzukehren.
- Beachten Sie, dass der Befehl found_object einen Booleschen Wert meldet, ob der Entfernungssensor ein Objekt gefunden hat oder nicht.
- Beachten Sie, dass der Befehl get_distance die Entfernung des nächsten Objekts vom Sensor in Millimetern (mm) oder Zoll meldet.
- Beschreiben Sie, warum der Abstandssensor in einem Projekt verwendet wird.
Abstandssensor
Der Abstandssensor kann erkennen, ob sich ein Objekt vor einem VR-Roboter befindet und wenn ja, wie weit dieses Objekt vom Abstandssensor entfernt ist. Dies kann hilfreich sein, um durch ein Labyrinth zu navigieren, ohne ständig gegen die Wände zu stoßen, einem Objekt auszuweichen oder zu einem Objekt oder einer Wand auf den Spielplätzen zu fahren.
In diesem Gerät verwenden Sie den Abstandssensor, einen Sensor, der einen Laserlichtimpuls verwendet, um Objekte zu erkennen. Der Abstandssensor meldet den Abstand zwischen der Vorderseite des Abstandssensors am VR-Roboter und dem nächstgelegenen Objekt. Der Abstandssensor befindet sich im vorderen Auge des VR-Roboters. Genau wie der Stoßstangensensor kann der VR-Roboter die Daten des Abstandssensors nutzen, um Entscheidungen zu treffen.

Der Abstandssensor berechnet die Entfernung anhand der Zeit, die ein Laserlichtimpuls benötigt, um von einem Objekt zu reflektieren und zum Sensor zurückzukehren. Der Abstandssensor kann verwendet werden, um zu erkennen, wie weit der VR-Roboter von den Wänden im Wandlabyrinth-Spielplatz entfernt ist.

Befehl "Entfernung gefundenes Objekt"
Der Abstandssensor kann verwendet werden, um zu erkennen, ob sich ein Objekt (wie eine Wand) davor befindet. Diese Daten können dann in einem Projekt verwendet werden, damit der VR-Roboter eine Entscheidung treffen kann, wenn der Abstandssensor ein Objekt erkennt.
Verwenden Sie den Befehl found_object in einem Python-Projekt, um den Zustand des Abstandssensors zu überprüfen. Der Befehl found_object gibt Boolesche Werte von True oder False zurück, je nachdem, ob ein Objekt vom Sensor erkannt wird.
- found_object gibt True zurück , wenn der Abstandssensor ein Objekt oder eine Oberfläche in seinem Sichtfeld und innerhalb von 3000 mm um den Sensor erkennt.
- found_object gibt False zurück , wenn der Abstandssensor ein Objekt oder eine Oberfläche innerhalb von 3000 mm nicht erkennt.
Der Befehl found_object wird normalerweise mit einer Kontrollstruktur wie einer while -Schleife verwendet, damit der VR-Roboter die Daten vom Distanzsensor verwenden kann, um eine Entscheidung zu treffen.
Wenn der Befehl found_object in einem Projekt verwendet wird, sollte der verwendete Distanzsensor angegeben werden. Im Wall Maze Playgroundist am VR Robot nur der vordere Distanzsensor verfügbar. Wenn der Befehl found_object aus der Toolbox in ein Projekt gezogen wird, gibt der Befehl found_object automatisch den verwendeten Distanzsensor an, wie hier gezeigt. Im Videoclip unten wird der Befehl found_object in der Toolbox ausgewählt und in den Arbeitsbereich gezogen. Wenn es im Projekt erscheint, erscheint der Befehl mit dem Gerät, das automatisch als "front_distance" geschrieben wird.
Entfernungsbefehl abrufen
Der Abstandssensor kann auch die Entfernung eines Objekts melden und diesen Wert verwenden, um eine Entscheidung zu treffen. Der Befehl get_distance gibt die numerische Entfernung des nächstgelegenen Objekts von der Vorderseite eines VR-Roboters zurück.
Wählen Sie, ob der Abstand in Millimetern (mm) oder Zoll angegeben wird, indem Sie den Parameter auf "MM" oder "ZOLL" setzen.
Der Befehl get_distance kann zusammen mit anderen Befehlen, etwa einer while -Schleife, in einem Projekt verwendet werden, um einen VR-Roboter anzuweisen, eine bestimmte Distanz von einem Objekt wegzufahren (oder darauf zu), oder eine Aktion auszuführen, wenn eine bestimmte Distanz gemeldet wird.
Wenn der Befehl get_distance in einem Projekt verwendet wird, sollte der verwendete Distanzsensor angegeben werden. Im Wall Maze Playgroundist am VR Robot nur der vordere Distanzsensor verfügbar. Wenn der Befehl get_distance aus der Toolbox in ein Projekt gezogen wird, gibt der Befehl get_distance automatisch den verwendeten Distanzsensor an, wie hier gezeigt. Im Videoclip unten wird der Befehl get_distance in der Toolbox ausgewählt und in den Arbeitsbereich gezogen. Wenn es im Projekt erscheint, erscheint der Befehl mit dem Gerät, das automatisch als "front_distance" geschrieben wird.
Der Abstandssensor und das Problem des Wandlabyrinths
Wenn man über das Problem des Wandlabyrinths nachdenkt, ist das Ziel, den VR-Roboter zu fahren, während er weit von einer Wand entfernt ist. Wenn sich der VR-Roboter einer Wand nähert, muss er anhalten oder sich drehen, ohne die Wand zu berühren, um durch das Labyrinth zu gelangen. Die Verwendung des Abstandssensors ermöglicht es einem VR-Roboter, an ein Objekt heranzufahren, ohne es zu berühren.
Im folgenden Videoclip-Beispiel fährt der VR-Roboter vorwärts, während der Abstandssensor meldet, dass er mehr als 50 Millimeter von einem Objekt entfernt ist. Sobald er weniger als 50 Millimeter entfernt ist, hört der VR-Roboter auf zu fahren. Beachten Sie, dass der VR-Roboter die Wand nicht berührt.
Sie werden feststellen, dass das Dashboard den Wert anzeigt, den der Abstandssensor in Echtzeit meldet, während das Projekt ausgeführt wird. Wenn der Wert größer als 50 Millimeter ist, fährt der VR-Roboter weiter vorwärts.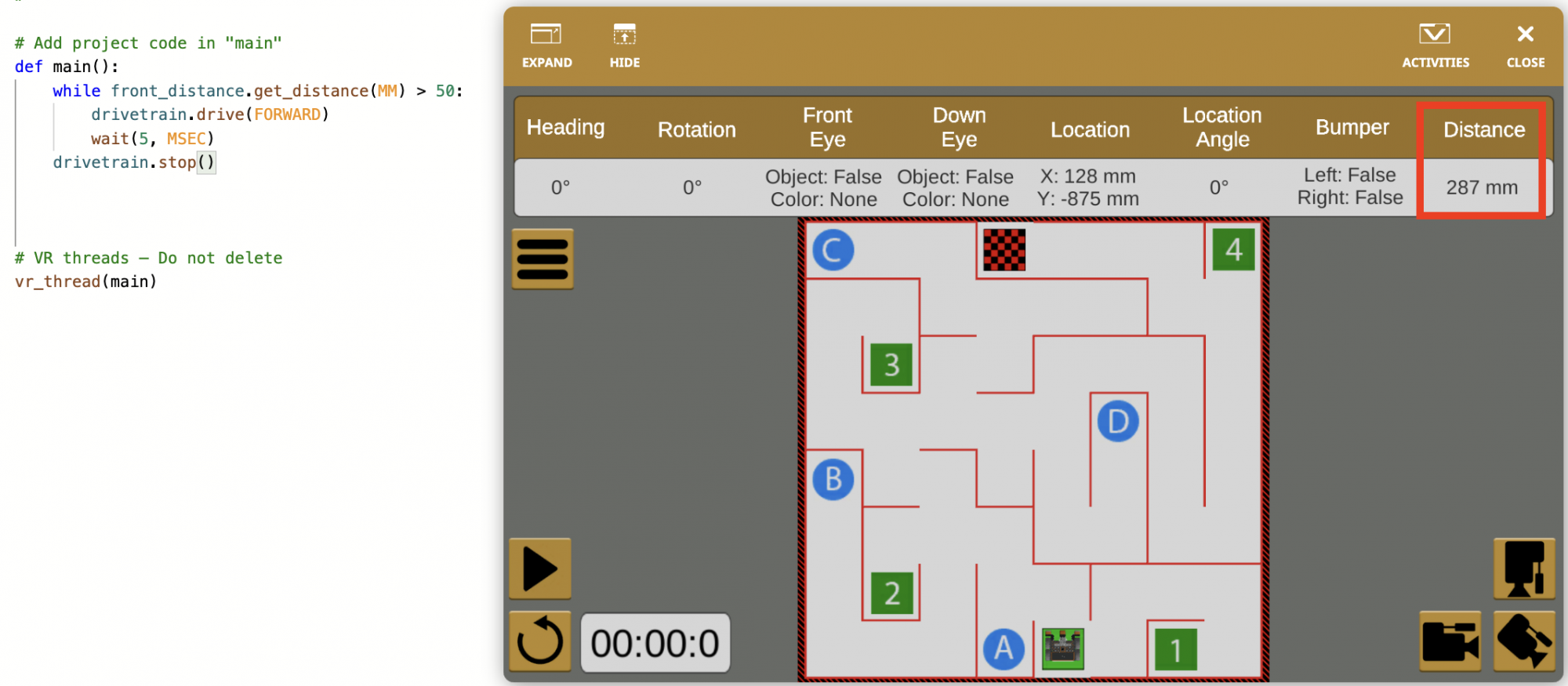
Wenn der Abstandssensor einen Wert von weniger als 50 Millimeter meldet, befindet sich der VR-Roboter in der Nähe der Wand, ohne sie zu berühren, und hört auf zu fahren. 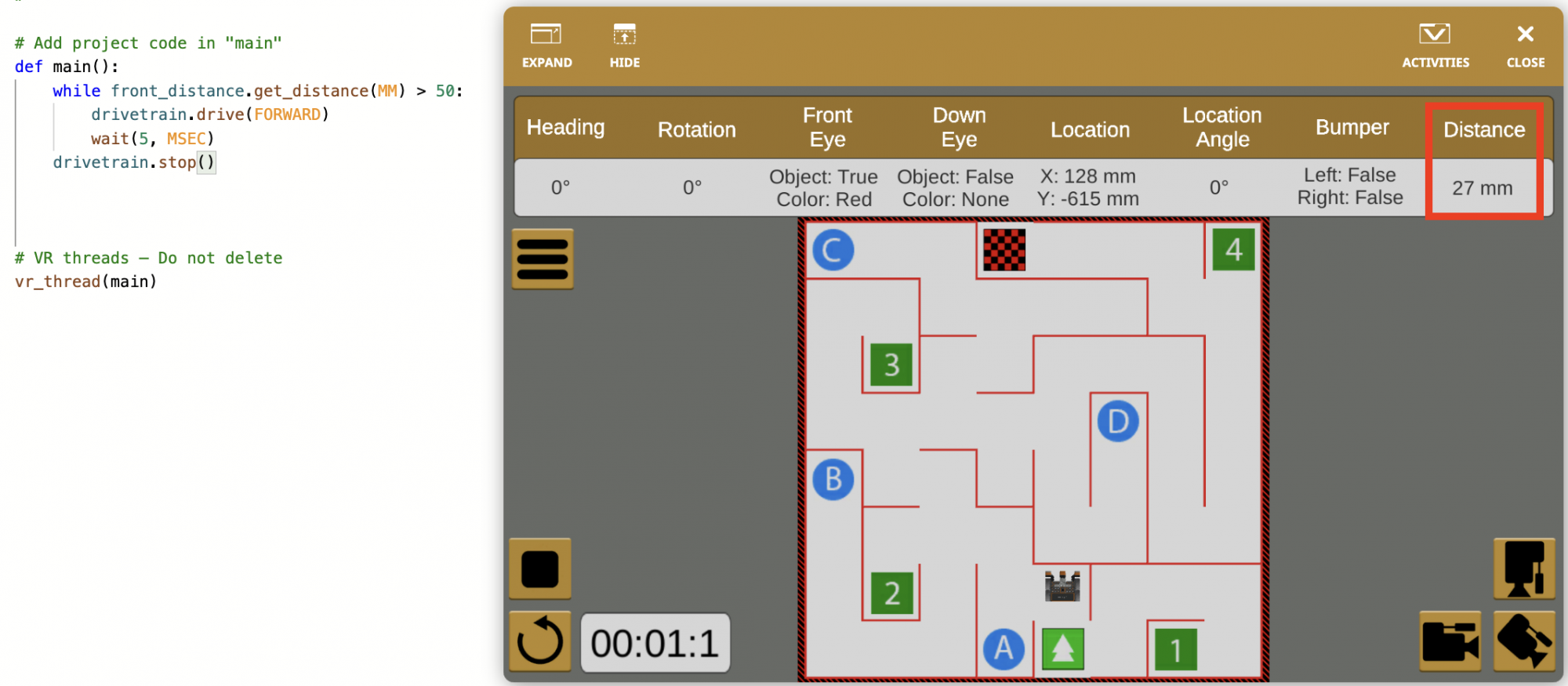
In diesem Beispiel wird der Befehl get_distance mit einem Vergleichsoperator verwendet, um in einer Schleife einen booleschen Wert zurückzugeben. In dieser Einheit erfahren Sie mehr über die Operatoren größer als (>>) und kleiner als ( ).
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf