
Leçon 1 : Qu'est-ce qu'un capteur de distance ?
Dans cette leçon, vous apprendrez ce qu'est le capteur de distance et pourquoi vous utiliseriez le capteur de distance avec un robot VR. Vous apprendrez également comment fonctionne le capteur de distance et comment utiliser le capteur de distance dans un projet VEXcode VR Python.
Résultats d'apprentissage
- Identifiez que le capteur de distance indique la distance entre le capteur lui-même et l'objet le plus proche.
- Identifiez que le capteur de distance détermine la distance en utilisant le temps nécessaire pour qu'une impulsion de lumière laser se réfléchisse sur un objet et retourne au capteur.
- Identifiez que la commande found_object renvoie une valeur booléenne si le capteur de distance a trouvé un objet ou non.
- Identifiez que la commande get_distance indique la distance de l'objet le plus proche du capteur en millimètres (mm) ou en pouces.
- Décrivez pourquoi le capteur de distance serait utilisé dans un projet.
Capteur de distance
Le capteur de distance peut détecter s'il y a un objet devant un robot VR, et si oui, à quelle distance se trouve cet objet du capteur de distance. Cela peut être utile pour naviguer dans un labyrinthe sans heurter continuellement les murs, pour éviter un objet ou pour se diriger vers un objet ou un mur dans les aires de jeux.
Dans cette unité, vous utiliserez le capteur de distance, un capteur qui utilise une impulsion de lumière laser pour détecter des objets. Le capteur de distance indique la distance entre l'avant du capteur de distance sur le robot VR et l'objet le plus proche. Le capteur de distance est situé dans l'œil avant du robot VR. Tout comme le capteur de pare-chocs, le robot VR peut utiliser les données du capteur de distance pour prendre des décisions.

Le capteur de distance calcule la distance en utilisant le temps nécessaire pour qu'une impulsion de lumière laser se réfléchisse sur un objet et retourne au capteur. Le capteur de distance peut être utilisé pour détecter la distance entre VR Robot et les murs de l'aire de jeux Wall Maze.

Commande d'objet de distance trouvée
Le capteur de distance peut être utilisé pour détecter s'il y a un objet (comme un mur) devant lui. Ces données peuvent ensuite être utilisées dans un projet afin que le robot VR puisse prendre une décision lorsque le capteur de distance détecte un objet.
Utilisez la commande found_object dans un projet Python pour vérifier l'état du capteur de distance. La commande found_object renvoie des valeurs booléennes True ou False, selon qu'un objet est détecté par le capteur.
- found_object renvoie True lorsque le capteur de distance détecte un objet ou une surface dans son champ de vision, et à moins de 3000 mm du capteur.
- found_object renvoie False lorsque le capteur de distance ne détecte pas d'objet ou de surface à moins de 3000 mm.
La commande found_object est généralement utilisée avec une structure de contrôle, comme une boucle while , afin que le robot VR puisse utiliser les données du capteur de distance pour prendre une décision.
Lorsque la commande found_object est utilisée dans un projet, le capteur de distance utilisé doit être spécifié. Dans le Wall Maze Playground, seul le capteur de distance avant est disponible sur le robot VR. Lorsque la commande found_object est déplacée de la boîte à outils vers un projet, la commande found_object spécifie automatiquement le capteur de distance utilisé, comme illustré ici. Dans le clip vidéo ci-dessous, la commande found_object est sélectionnée dans la boîte à outils et glissée dans l'espace de travail. Lorsqu'elle apparaît dans le projet, la commande apparaît automatiquement avec l'appareil écrit « front_distance ».
Obtenir la commande de distance
Le capteur de distance peut également signaler la distance d'un objet et utiliser cette valeur pour prendre une décision. La commande get_distance renvoie la distance numérique de l'objet le plus proche de l'avant d'un robot VR.
Choisissez si la distance est indiquée en millimètres (mm) ou en pouces en réglant le paramètre sur « MM » ou « POUCES ».
La commande get_distance peut être utilisée avec d'autres commandes, comme une boucle while , dans un projet pour demander à un robot VR de s'éloigner (ou de se rapprocher) d'un objet à une certaine distance, ou d'effectuer une action lorsqu'une distance spécifique est signalée.
Lorsque la commande get_distance est utilisée dans un projet, le capteur de distance utilisé doit être spécifié. Dans le Wall Maze Playground, seul le capteur de distance avant est disponible sur le robot VR. Lorsque la commande get_distance est déplacée de la boîte à outils vers un projet, la commande get_distance spécifie automatiquement le capteur de distance utilisé, comme indiqué ici. Dans le clip vidéo ci-dessous, la commande get_distance est sélectionnée dans la boîte à outils et glissée dans l'espace de travail. Lorsqu'elle apparaît dans le projet, la commande apparaît automatiquement avec l'appareil écrit « front_distance ».
Le capteur de distance et le problème du labyrinthe mural
En pensant au problème du labyrinthe mural, l'objectif est d'avoir le VR Robot entraîné alors qu'il est loin d'un mur. Lorsque le robot VR s'approche d'un mur, il doit alors s'arrêter ou tourner sans toucher le mur, afin de continuer à travers le labyrinthe. L'utilisation du capteur de distance permettra à un robot VR de s'approcher d'un objet sans le toucher.
Dans l'exemple de clip vidéo suivant, le robot VR avance tandis que le capteur de distance signale qu'il est à plus de 50 millimètres d'un objet. Une fois à moins de 50 millimètres, le robot VR cessera de conduire. Notez que le robot VR ne touche pas le mur.
Vous remarquerez que le tableau de bord affiche la valeur signalée par le capteur de distance en temps réel pendant l'exécution du projet. Lorsque la valeur est supérieure à 50 millimètres, le robot VR continuera à avancer.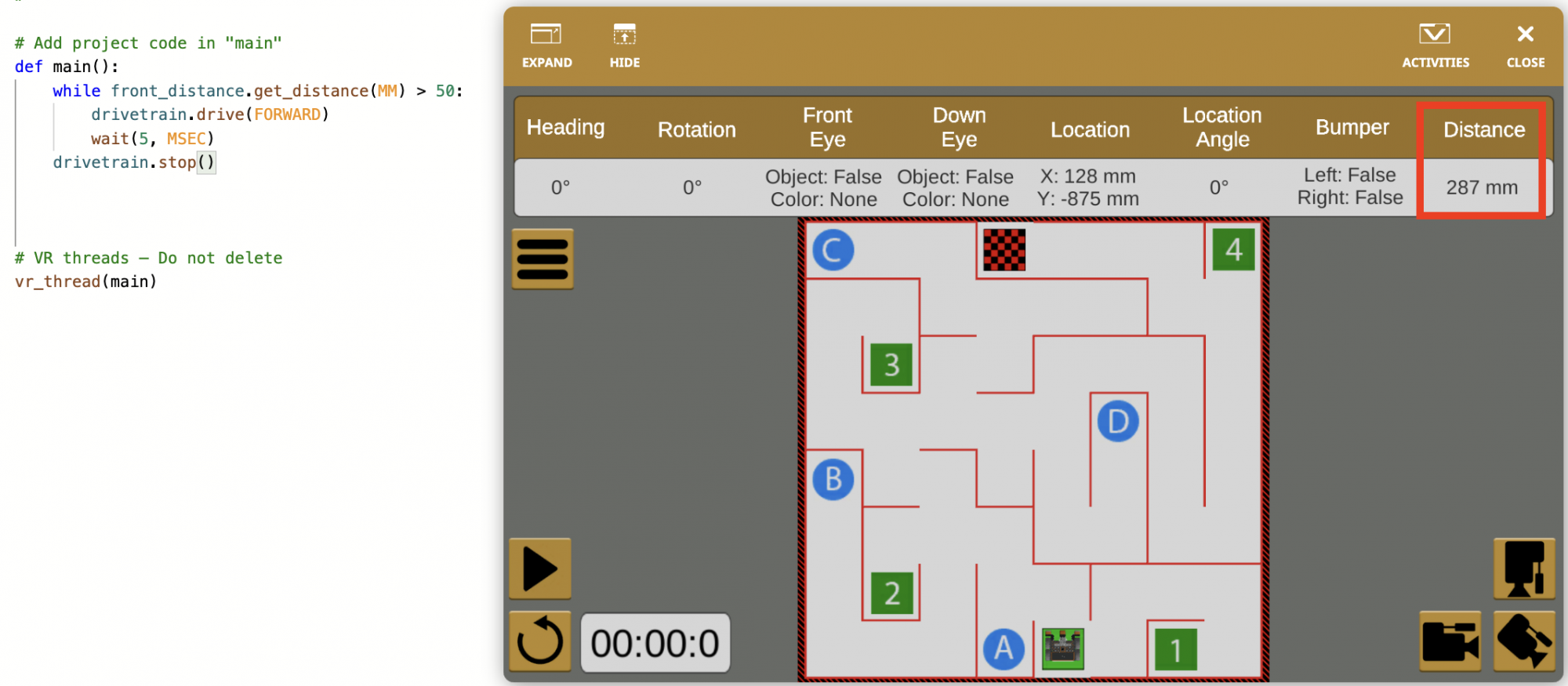
Lorsque le capteur de distance indique une valeur inférieure à 50 millimètres, le robot VR est près du mur sans le toucher et arrête de conduire. 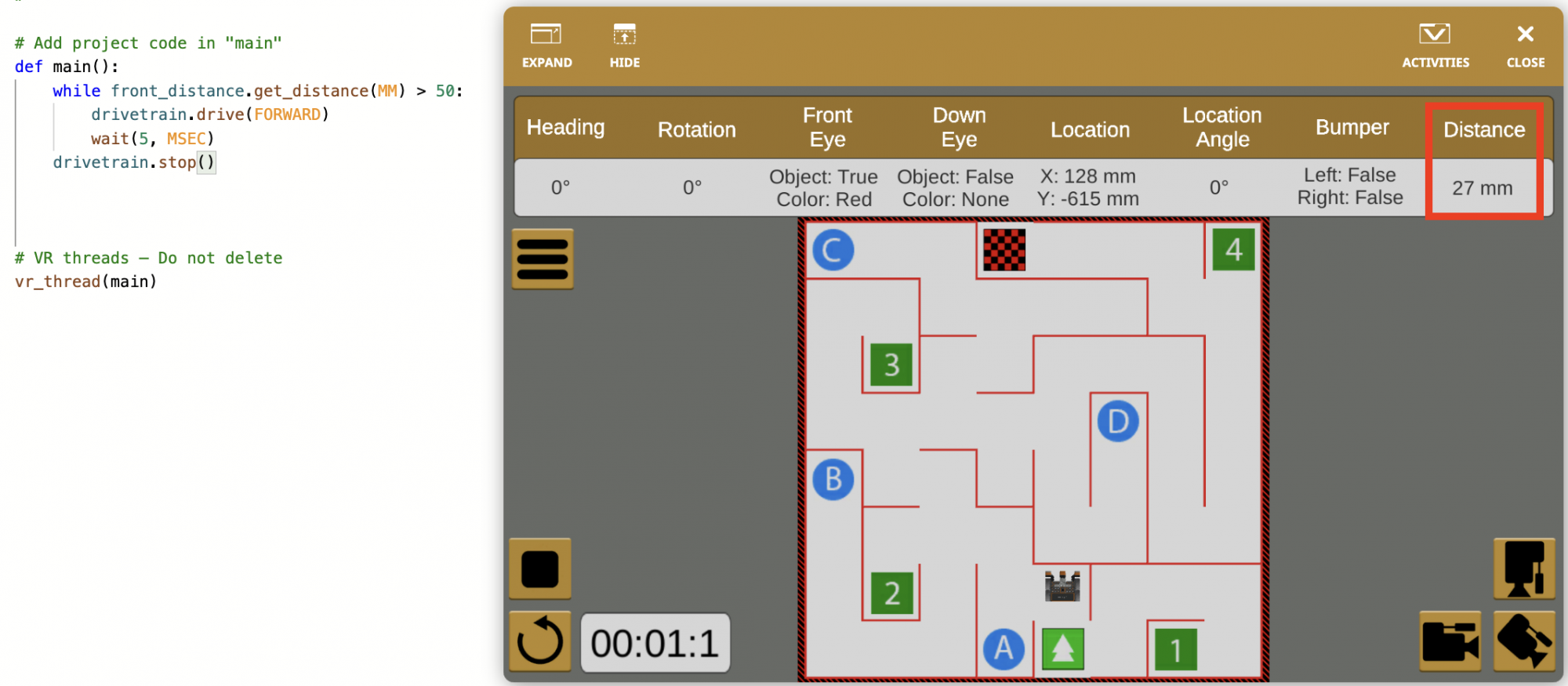
Dans cet exemple , la commande get_distance est utilisée avec un opérateur de comparaison pour renvoyer une valeur booléenne dans une boucle. Vous en apprendrez plus sur les opérateurs supérieur à (>) et inférieur à (>) dans cette unité.
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf