
പാഠം 1: ഒരു ദൂര സെൻസർ എന്താണ്?
ഈ പാഠത്തിൽ, ഡിസ്റ്റൻസ് സെൻസർ എന്താണെന്നും ഒരു VR റോബോട്ടിൽ നിങ്ങൾ എന്തിനാണ് ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിക്കുന്നതെന്നും നിങ്ങൾ പഠിക്കും. ഒരു VEXcode VR പൈത്തൺ പ്രോജക്റ്റിൽ ഡിസ്റ്റൻസ് സെൻസർ എങ്ങനെ പ്രവർത്തിക്കുന്നുവെന്നും ഡിസ്റ്റൻസ് സെൻസർ എങ്ങനെ ഉപയോഗിക്കാമെന്നും നിങ്ങൾ പഠിക്കും.
പഠന ഫലങ്ങൾ
- സെൻസറും ഏറ്റവും അടുത്തുള്ള വസ്തുവും തമ്മിലുള്ള ദൂരം ഡിസ്റ്റൻസ് സെൻസർ റിപ്പോർട്ട് ചെയ്യുന്നുവെന്ന് തിരിച്ചറിയുക.
- ലേസർ പ്രകാശത്തിന്റെ ഒരു പൾസ് ഒരു വസ്തുവിൽ നിന്ന് പ്രതിഫലിച്ച് സെൻസറിലേക്ക് തിരികെ വരാൻ എടുക്കുന്ന സമയം ഉപയോഗിച്ചാണ് ദൂര സെൻസർ ദൂരം നിർണ്ണയിക്കുന്നതെന്ന് തിരിച്ചറിയുക.
- ഡിസ്റ്റൻസ് സെൻസർ ഒരു വസ്തു കണ്ടെത്തിയാലും ഇല്ലെങ്കിലും found_objectകമാൻഡ് ഒരു ബൂളിയൻ മൂല്യം റിപ്പോർട്ട് ചെയ്യുന്നുവെന്ന് തിരിച്ചറിയുക.
- get_distanceകമാൻഡ് സെൻസറിൽ നിന്ന് ഏറ്റവും അടുത്തുള്ള വസ്തുവിന്റെ ദൂരം മില്ലിമീറ്ററിൽ (mm) അല്ലെങ്കിൽ ഇഞ്ചിൽ റിപ്പോർട്ട് ചെയ്യുന്നുവെന്ന് തിരിച്ചറിയുക.
- ഒരു പ്രോജക്റ്റിൽ ഡിസ്റ്റൻസ് സെൻസർ എന്തിനാണ് ഉപയോഗിക്കുന്നതെന്ന് വിവരിക്കുക.
ദൂര സെൻസർ
ഒരു VR റോബോട്ടിന് മുന്നിൽ ഒരു വസ്തു ഉണ്ടോ എന്നും അങ്ങനെയാണെങ്കിൽ, ആ വസ്തു ദൂര സെൻസറിൽ നിന്ന് എത്ര അകലെയാണെന്നും ദൂര സെൻസറിന് കണ്ടെത്താൻ കഴിയും. തുടർച്ചയായി ചുമരുകളിൽ ഇടിക്കാതെ, ഒരു വസ്തുവിനെ ഒഴിവാക്കുന്നതിനോ, കളിസ്ഥലങ്ങളിലെ ഒരു വസ്തുവിലേക്കോ മതിലിലേക്കോ വാഹനമോടിക്കുന്നതിനോ ഒരു മസിലിലൂടെ സഞ്ചരിക്കുന്നതിന് ഇത് സഹായകമാകും.
ഈ യൂണിറ്റിൽ, നിങ്ങൾ ദൂര സെൻസർ ഉപയോഗിക്കും, ഇത് വസ്തുക്കളെ കണ്ടെത്തുന്നതിന് ലേസർ പ്രകാശത്തിന്റെ ഒരു പൾസ് ഉപയോഗിക്കുന്ന ഒരു സെൻസറാണ്. VR റോബോട്ടിലെ ഡിസ്റ്റൻസ് സെൻസറിന്റെ മുൻഭാഗവും ഏറ്റവും അടുത്തുള്ള വസ്തുവും തമ്മിലുള്ള ദൂരം ഡിസ്റ്റൻസ് സെൻസർ റിപ്പോർട്ട് ചെയ്യുന്നു. വിആർ റോബോട്ടിന്റെ ഫ്രണ്ട് ഐയിലാണ് ഡിസ്റ്റൻസ് സെൻസർ സ്ഥിതി ചെയ്യുന്നത്. ബമ്പർ സെൻസറിനെപ്പോലെ, വിആർ റോബോട്ടിനും ഡിസ്റ്റൻസ് സെൻസറിൽ നിന്നുള്ള ഡാറ്റ ഉപയോഗിച്ച് തീരുമാനങ്ങൾ എടുക്കാൻ കഴിയും.

ലേസർ പ്രകാശത്തിന്റെ ഒരു പൾസ് ഒരു വസ്തുവിൽ നിന്ന് പ്രതിഫലിച്ച് സെൻസറിലേക്ക് തിരികെ വരാൻ എടുക്കുന്ന സമയം ഉപയോഗിച്ചാണ് ഡിസ്റ്റൻസ് സെൻസർ ദൂരം കണക്കാക്കുന്നത്. വാൾ മേസ് പ്ലേഗ്രൗണ്ടിലെ ചുവരുകളിൽ നിന്ന് VR റോബോട്ട് എത്ര ദൂരെയാണെന്ന് കണ്ടെത്താൻ ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിക്കാം.

ഡിസ്റ്റൻസ് ഫൗണ്ട് ഒബ്ജക്റ്റ് കമാൻഡ്
ഒരു ഭിത്തി പോലുള്ള ഒരു വസ്തു മുന്നിൽ ഉണ്ടോ എന്ന് കണ്ടെത്താൻ ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിക്കാം. ഈ ഡാറ്റ പിന്നീട് ഒരു പ്രോജക്റ്റിൽ ഉപയോഗിക്കാൻ കഴിയും, അതുവഴി ദൂര സെൻസർ ഒരു വസ്തുവിനെ കണ്ടെത്തുമ്പോൾ VR റോബോട്ടിന് തീരുമാനമെടുക്കാൻ കഴിയും.
ഒരു പൈത്തൺ പ്രോജക്റ്റിൽ, ഡിസ്റ്റൻസ് സെൻസറിന്റെ അവസ്ഥ പരിശോധിക്കാൻ found_object കമാൻഡ് ഉപയോഗിക്കുക. സെൻസർ ഒരു വസ്തുവിനെ കണ്ടെത്തുന്നുണ്ടോ എന്നതിനെ ആശ്രയിച്ച്, found_object കമാൻഡ് True അല്ലെങ്കിൽ False എന്ന ബൂളിയൻ മൂല്യങ്ങൾ നൽകുന്നു.
- found_objectഎന്നത് Trueഎന്ന് തിരികെ നൽകുന്നു, അത് ഡിസ്റ്റൻസ് സെൻസർ ഒരു വസ്തുവിനെയോ പ്രതലത്തെയോ അതിന്റെ വ്യൂ ഫീൽഡിനുള്ളിൽ കണ്ടെത്തുകയും സെൻസറിന്റെ 3000 മില്ലിമീറ്ററിനുള്ളിൽ കണ്ടെത്തുകയും ചെയ്യുമ്പോൾ ആണ്.
- 3000 മില്ലിമീറ്ററിനുള്ളിൽ ഒരു വസ്തുവിനെയോ പ്രതലത്തെയോ ഡിസ്റ്റൻസ് സെൻസർ കണ്ടെത്തുന്നില്ലെങ്കിൽ found_object Falseനൽകുന്നു.
found_objectകമാൻഡ് സാധാരണയായി while ലൂപ്പ് പോലുള്ള ഒരു നിയന്ത്രണ ഘടനയിൽ ഉപയോഗിക്കുന്നു, അതുവഴി VR റോബോട്ടിന് ഒരു തീരുമാനമെടുക്കാൻ ഡിസ്റ്റൻസ് സെൻസറിൽ നിന്നുള്ള ഡാറ്റ ഉപയോഗിക്കാൻ കഴിയും.
ഒരു പ്രോജക്റ്റിൽ found_object കമാൻഡ് ഉപയോഗിക്കുമ്പോൾ, ഉപയോഗിക്കുന്ന ഡിസ്റ്റൻസ് സെൻസർ വ്യക്തമാക്കണം. വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ൽ, VR റോബോട്ടിൽ ഫ്രണ്ട് ഡിസ്റ്റൻസ് സെൻസർ മാത്രമേ ലഭ്യമാകൂ. found_objectകമാൻഡ് ടൂൾബോക്സിൽ നിന്ന് ഒരു പ്രോജക്റ്റിലേക്ക് ഡ്രാഗ് ചെയ്യുമ്പോൾ, ഇവിടെ കാണിച്ചിരിക്കുന്നതുപോലെ,found_objectകമാൻഡ് ഉപയോഗത്തിലുള്ള ഡിസ്റ്റൻസ് സെൻസർ സ്വയമേവ വ്യക്തമാക്കും. താഴെയുള്ള വീഡിയോ ക്ലിപ്പിൽ, found_object കമാൻഡ് ടൂൾബോക്സിൽ തിരഞ്ഞെടുത്ത് വർക്ക്സ്പെയ്സിലേക്ക് വലിച്ചിടുന്നു. പ്രോജക്റ്റിൽ ഇത് ദൃശ്യമാകുമ്പോൾ, "front_distance" എന്ന് എഴുതിയ Device-നൊപ്പം കമാൻഡ് യാന്ത്രികമായി ദൃശ്യമാകും.
ഡിസ്റ്റൻസ് കമാൻഡ് നേടുക
ഒരു വസ്തുവിന്റെ ദൂരം റിപ്പോർട്ട് ചെയ്യാനും ആ മൂല്യം ഉപയോഗിച്ച് ഒരു തീരുമാനമെടുക്കാനും ദൂര സെൻസറിന് കഴിയും. get_distanceകമാൻഡ് ഒരു VR റോബോട്ടിന്റെ മുന്നിൽ നിന്ന് ഏറ്റവും അടുത്തുള്ള വസ്തുവിന്റെ സംഖ്യാ ദൂരം തിരികെ നൽകുന്നു.
"MM" അല്ലെങ്കിൽ "INCHES" എന്ന പാരാമീറ്റർ സജ്ജമാക്കി ദൂരം മില്ലിമീറ്ററിലോ (mm) ഇഞ്ചിലോ റിപ്പോർട്ട് ചെയ്യണോ എന്ന് തിരഞ്ഞെടുക്കുക.
ഒരു വസ്തുവിൽ നിന്ന് ഒരു നിശ്ചിത ദൂരം (അല്ലെങ്കിൽ നേരെ) ഓടിക്കാൻ ഒരു VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുന്നതിനോ അല്ലെങ്കിൽ ഒരു നിർദ്ദിഷ്ട ദൂരം റിപ്പോർട്ട് ചെയ്യുമ്പോൾ ഒരു പ്രവർത്തനം പൂർത്തിയാക്കുന്നതിനോ ഒരു പ്രോജക്റ്റിൽ, get_distance കമാൻഡ് മറ്റ് കമാൻഡുകൾക്കൊപ്പം ഉപയോഗിക്കാം, ഉദാഹരണത്തിന്whileലൂപ്പ്.
ഒരു പ്രോജക്റ്റിൽ get_distanceകമാൻഡ് ഉപയോഗിക്കുമ്പോൾ, ഉപയോഗിക്കുന്ന ഡിസ്റ്റൻസ് സെൻസർ വ്യക്തമാക്കണം. വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ൽ, VR റോബോട്ടിൽ ഫ്രണ്ട് ഡിസ്റ്റൻസ് സെൻസർ മാത്രമേ ലഭ്യമാകൂ. get_distanceകമാൻഡ് ടൂൾബോക്സിൽ നിന്ന് ഒരു പ്രോജക്റ്റിലേക്ക് ഡ്രാഗ് ചെയ്യുമ്പോൾ, ഇവിടെ കാണിച്ചിരിക്കുന്നതുപോലെ,get_distanceകമാൻഡ് ഉപയോഗത്തിലുള്ള ഡിസ്റ്റൻസ് സെൻസർ സ്വയമേവ വ്യക്തമാക്കും. താഴെയുള്ള വീഡിയോ ക്ലിപ്പിൽ, get_distance കമാൻഡ് ടൂൾബോക്സിൽ തിരഞ്ഞെടുത്ത് വർക്ക്സ്പെയ്സിലേക്ക് വലിച്ചിടുന്നു. പ്രോജക്റ്റിൽ ഇത് ദൃശ്യമാകുമ്പോൾ, "front_distance" എന്ന് എഴുതിയ Device-നൊപ്പം കമാൻഡ് യാന്ത്രികമായി ദൃശ്യമാകും.
ദൂര സെൻസറും വാൾ മെയ്സ് പ്രശ്നവും
വാൾ മെയ്സ് പ്രശ്നത്തെക്കുറിച്ച് ചിന്തിക്കുമ്പോൾ, ഒരു മതിലിൽ നിന്ന് വളരെ അകലെയായിരിക്കുമ്പോൾ വിആർ റോബോട്ട് ഓടിക്കുക എന്നതാണ് ലക്ഷ്യം. വിആർ റോബോട്ട് ഒരു മതിലിനടുത്തെത്തുമ്പോൾ, ആ മസിലിലൂടെ മുന്നോട്ട് പോകുന്നതിന്, ചുവരിൽ തൊടാതെ നിർത്തുകയോ തിരിയുകയോ ചെയ്യേണ്ടതുണ്ട്. ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിക്കുന്നത് ഒരു വിആർ റോബോട്ടിനെ ഒരു വസ്തുവിനെ തൊടാതെ തന്നെ അതിലേക്ക് ഓടിക്കാൻ അനുവദിക്കും.
താഴെ കൊടുത്തിരിക്കുന്ന വീഡിയോ ക്ലിപ്പ് ഉദാഹരണത്തിൽ, ഒരു വസ്തുവിൽ നിന്ന് 50 മില്ലിമീറ്ററിൽ കൂടുതൽ അകലെയാണെന്ന് ഡിസ്റ്റൻസ് സെൻസർ റിപ്പോർട്ട് ചെയ്യുമ്പോൾ VR റോബോട്ട് മുന്നോട്ട് ഓടും. 50 മില്ലിമീറ്ററിൽ താഴെ ദൂരം എത്തുമ്പോൾ, വിആർ റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തും. വിആർ റോബോട്ട് ചുമരിൽ തൊടുന്നില്ലെന്ന് ശ്രദ്ധിക്കുക.
പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുമ്പോൾ, ദൂര സെൻസർ റിപ്പോർട്ട് ചെയ്യുന്ന മൂല്യം ഡാഷ്ബോർഡ് തത്സമയം പ്രദർശിപ്പിക്കുന്നത് നിങ്ങൾ ശ്രദ്ധിക്കും. മൂല്യം മില്ലിമീറ്ററിൽ , VR റോബോട്ട് മുന്നോട്ട് പോകുന്നത് തുടരും.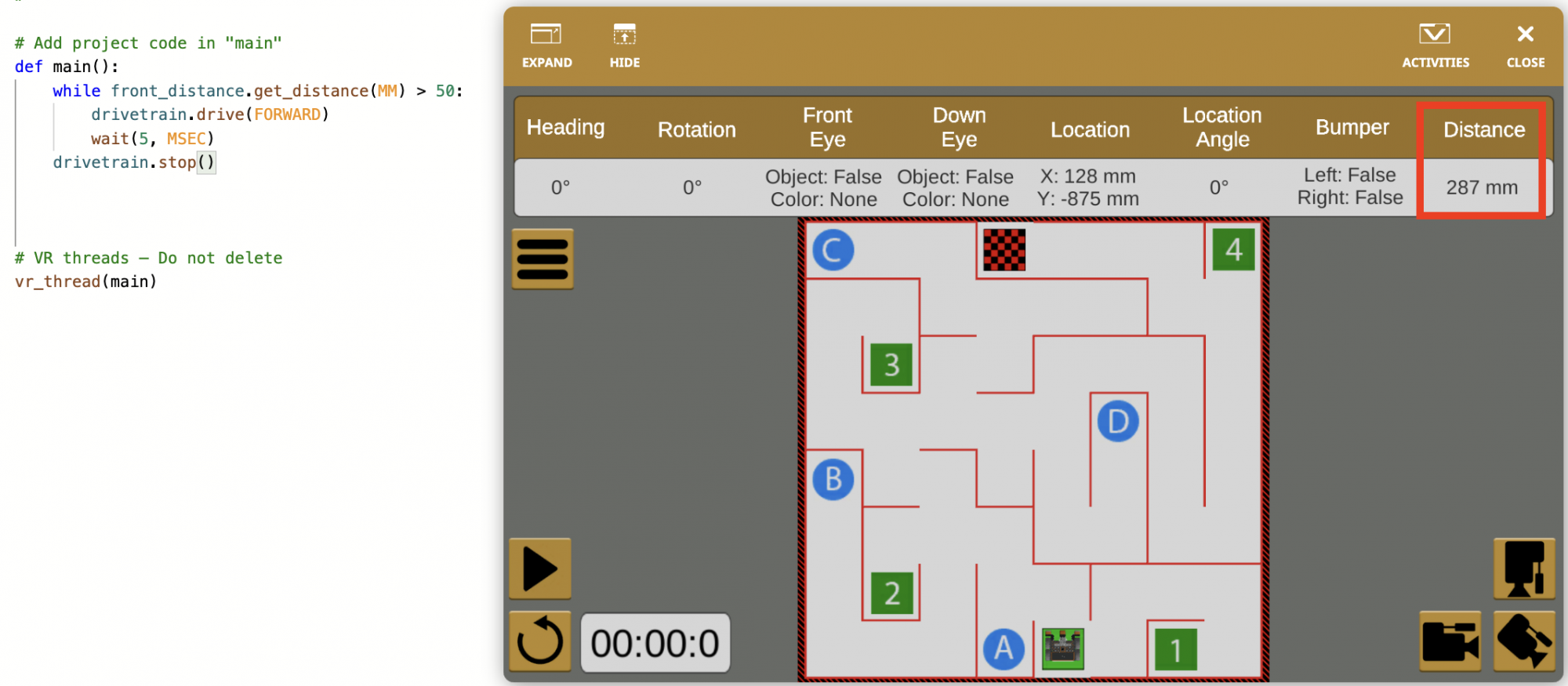
ഡിസ്റ്റൻസ് സെൻസർമില്ലിമീറ്ററിൽ താഴെയുള്ള മൂല്യം റിപ്പോർട്ട് ചെയ്യുമ്പോൾ, VR റോബോട്ട് ചുവരിൽ തൊടാതെ അതിനടുത്തായി നിൽക്കുകയും ഡ്രൈവിംഗ് നിർത്തുകയും ചെയ്യുന്നു. 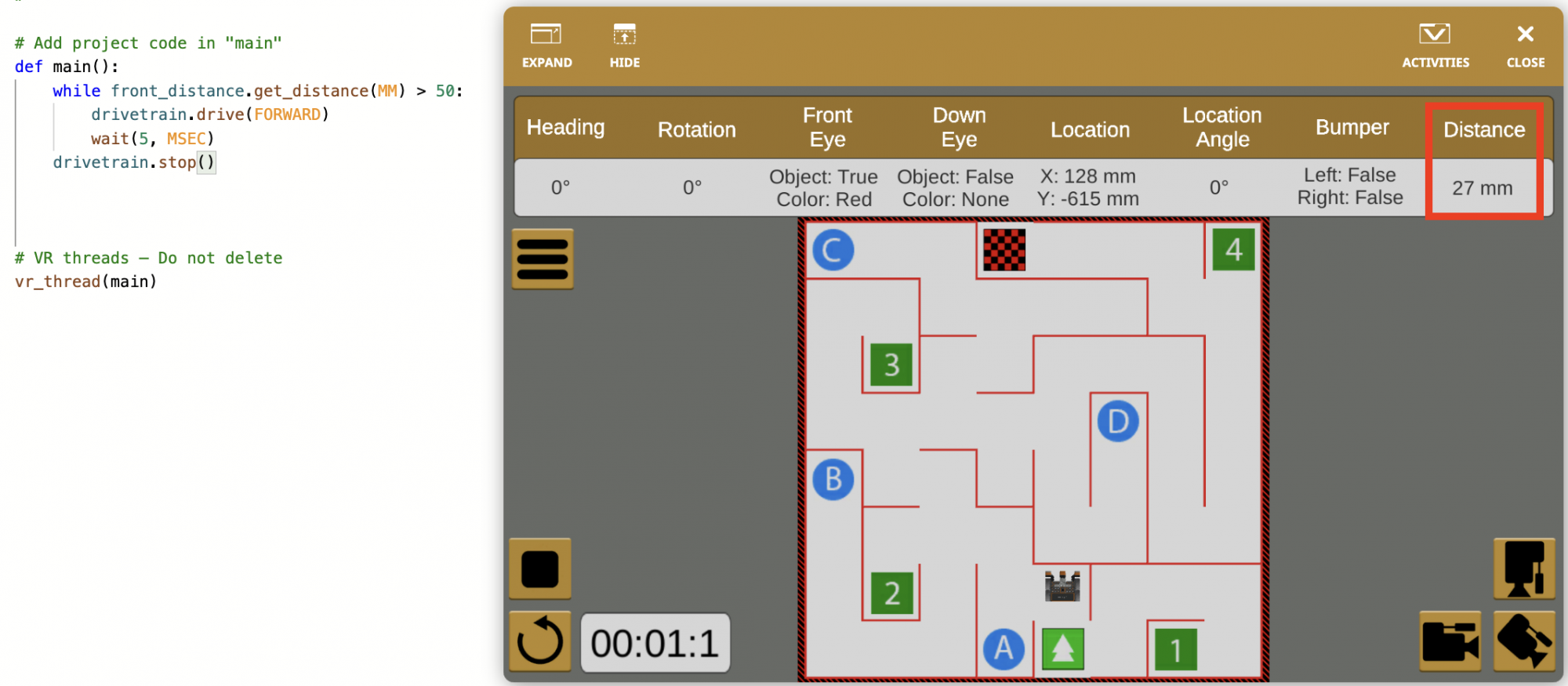
ഈ ഉദാഹരണത്തിൽ, ഒരു ലൂപ്പിൽ ഒരു ബൂളിയൻ മൂല്യം തിരികെ നൽകുന്നതിന് ഒരു താരതമ്യ ഓപ്പറേറ്ററിനൊപ്പം get_distanceകമാൻഡ് ഉപയോഗിക്കുന്നു. ഈ യൂണിറ്റിൽ (>) നെക്കാൾ വലുതും (>) നെക്കാൾ കുറവുമായ ഓപ്പറേറ്ററുകളെക്കുറിച്ച് നിങ്ങൾ കൂടുതലറിയും.
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.