
Pelajaran 1: Apa itu Sensor Jarak?
Dalam Pelajaran ini, Anda akan mempelajari apa itu Sensor Jarak, dan mengapa Anda harus menggunakan Sensor Jarak dengan Robot VR. Anda juga akan mempelajari cara kerja Sensor Jarak dan cara menggunakan Sensor Jarak dalam proyek Python VEXcode VR.
Hasil belajar
- Identifikasi bahwa Sensor Jarak melaporkan jarak antara sensor itu sendiri dan objek terdekat.
- Identifikasi bahwa Sensor Jarak menentukan jarak dengan menggunakan waktu yang dibutuhkan pulsa cahaya laser untuk memantulkan suatu objek dan kembali ke sensor.
- Identifikasi bahwa perintah found_objectmelaporkan nilai Boolean jika Sensor Jarak telah menemukan suatu objek atau tidak.
- Identifikasi bahwa perintah get_distancemelaporkan jarak objek terdekat dari sensor dalam milimeter (mm) atau inci.
- Jelaskan mengapa Sensor Jarak akan digunakan dalam suatu proyek.
Sensor Jarak
Sensor Jarak dapat mendeteksi jika ada objek di depan Robot VR, dan jika ada, seberapa jauh objek tersebut dari Sensor Jarak. Ini dapat membantu dalam menavigasi labirin tanpa terus menerus menabrak dinding, untuk menghindari suatu objek, atau untuk berkendara ke suatu objek atau dinding di Taman Bermain.
Dalam Unit ini, Anda akan menggunakan Sensor Jarak, sensor yang menggunakan pulsa cahaya laser untuk mendeteksi objek. Sensor Jarak melaporkan jarak antara bagian depan Sensor Jarak pada Robot VR dan objek terdekat. Sensor Jarak terletak di Mata Depan pada Robot VR. Sama seperti Bumper Sensor, Robot VR dapat menggunakan data dari Sensor Jarak untuk membuat keputusan.

Sensor Jarak menghitung jarak dengan menggunakan waktu yang dibutuhkan pulsa cahaya laser untuk terpantul dari suatu objek dan kembali ke sensor. Sensor Jarak dapat digunakan untuk mendeteksi seberapa jauh Robot VR dari dinding diWall Maze Playground.

Perintah Objek Ditemukan Jarak
Sensor Jarak dapat digunakan untuk mendeteksi apakah ada objek (seperti dinding) di depannya. Data ini kemudian dapat digunakan dalam suatu proyek sehingga Robot VR dapat membuat keputusan saat Sensor Jarak mendeteksi suatu objek.
Gunakan perintah found_object dalam proyek Python untuk memeriksa kondisi Sensor Jarak. Perintah found_object mengembalikan nilai Boolean Benar atau Salah, tergantung pada apakah suatu objek terdeteksi oleh sensor.
- found_objectmengembalikan Benarketika Sensor Jarak mendeteksi objek atau permukaan dalam bidang pandangnya, dan dalam jarak 3000 mm dari sensor.
- found_objectmengembalikan Falseketika Sensor Jarak tidak mendeteksi objek atau permukaan dalam jarak 3000 mm.
Perintah found_objectbiasanya digunakan dengan struktur Kontrol, seperti loop while , sehingga Robot VR dapat menggunakan data dari Sensor Jarak untuk membuat keputusan.
Bila perintah found_object digunakan dalam suatu proyek, Sensor Jarak yang digunakan harus ditentukan. DiWall Maze Playground, hanya Sensor Jarak Depan yang tersedia pada Robot VR. Saat perintah found_objectdiseret dari Kotak Alat ke dalam proyek, perintahfound_objectakan secara otomatis menentukan Sensor Jarak yang digunakan, seperti yang ditunjukkan di sini. Dalam klip video di bawah, perintah found_object dipilih di Kotak Alat dan diseret ke Ruang Kerja. Ketika muncul dalam proyek, perintah tersebut muncul dengan Perangkat yang ditulis sebagai “front_distance” secara otomatis.
Dapatkan Perintah Jarak
Sensor Jarak juga dapat melaporkan jarak suatu objek, dan menggunakan nilai tersebut untuk membuat keputusan. Perintah get_distancemengembalikan jarak numerik objek terdekat dari depan Robot VR.
Pilih apakah jarak dilaporkan dalam milimeter (mm) atau inci dengan mengatur parameter ke "MM" atau "INCI."
Perintah get_distance dapat digunakan dengan perintah lain, seperti perulanganwhile, dalam sebuah proyek untuk menginstruksikan Robot VR untuk melaju pada jarak tertentu menjauh dari (atau menuju) sebuah objek, atau untuk menyelesaikan tindakan saat jarak tertentu dilaporkan.
Ketika perintah get_distancedigunakan dalam suatu proyek, Sensor Jarak yang digunakan harus ditentukan. DiWall Maze Playground, hanya Sensor Jarak Depan yang tersedia pada Robot VR. Saat perintah get_distancediseret dari Toolbox ke dalam proyek, perintahget_distanceakan secara otomatis menentukan Sensor Jarak yang digunakan, seperti yang ditunjukkan di sini. Dalam klip video di bawah, perintah get_distance dipilih di Kotak Alat dan diseret ke Ruang Kerja. Ketika muncul dalam proyek, perintah tersebut muncul dengan Perangkat yang ditulis sebagai “front_distance” secara otomatis.
Sensor Jarak dan Masalah Labirin Dinding
Berpikir tentang Masalah Labirin Dinding, tujuannya adalah agar Robot VR dapat mengemudi saat berada jauh dari dinding. Saat Robot VR mendekati dinding, ia harus berhenti atau berputar tanpa menyentuh dinding, agar dapat terus menelusuri labirin. Menggunakan Sensor Jarak akan memungkinkan Robot VR untuk mendekati suatu objek tanpa menyentuhnya.
Dalam contoh klip video berikut, Robot VR akan melaju ke depan sementara Sensor Jarak melaporkan bahwa jaraknya lebih dari 50 milimeter dari suatu objek. Setelah jaraknya kurang dari 50 milimeter, Robot VR akan berhenti melaju. Perhatikan bahwa Robot VR tidak menyentuh dinding.
Anda akan melihat bahwa Dasbor menampilkan nilai yang dilaporkan Sensor Jarak secara real-time saat proyek dijalankan. Bila nilainya lebih besar dari milimeter, Robot VR akan terus melaju ke depan.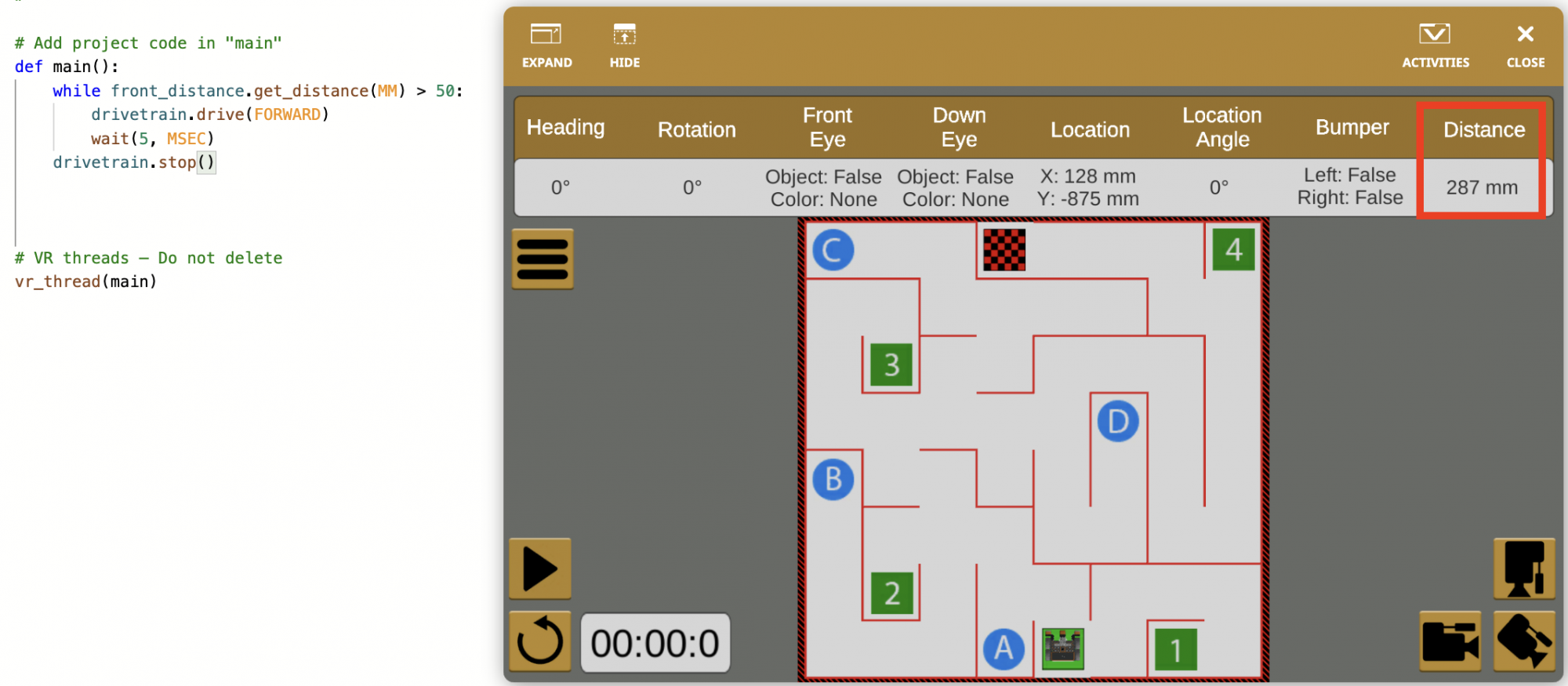
Ketika Sensor Jarak melaporkan nilai kurang darimilimeter, Robot VR berada di dekat dinding tanpa menyentuhnya, dan berhenti melaju. 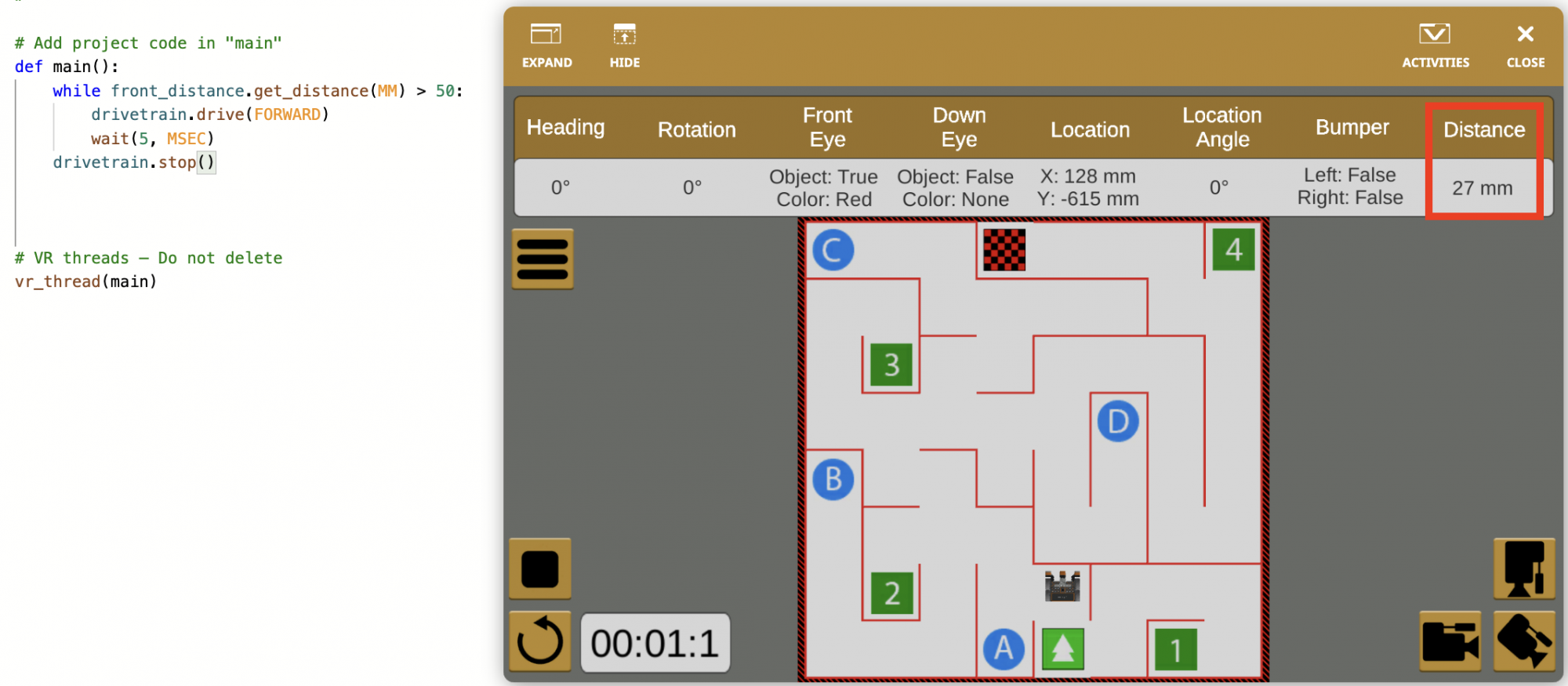
Dalam contoh ini, perintah get_distancedigunakan dengan operator perbandingan untuk mengembalikan nilai Boolean dalam satu loop. Anda akan mempelajari lebih lanjut tentang operator lebih besar dari (>) dan kurang dari (>) di Unit ini.