Arriba y más
6 Lecciones
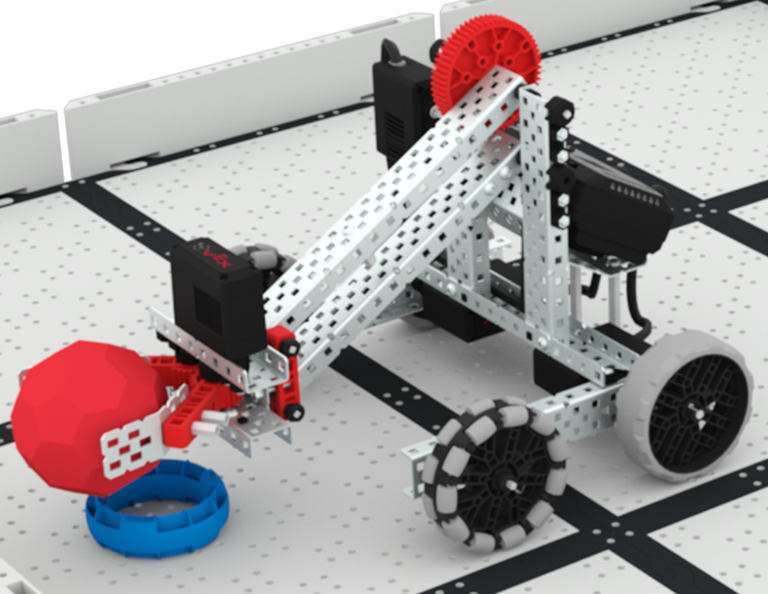
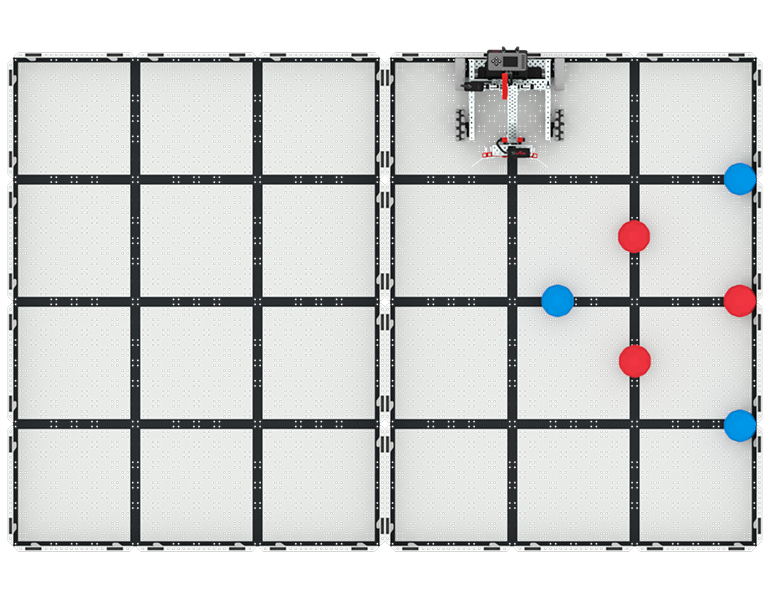
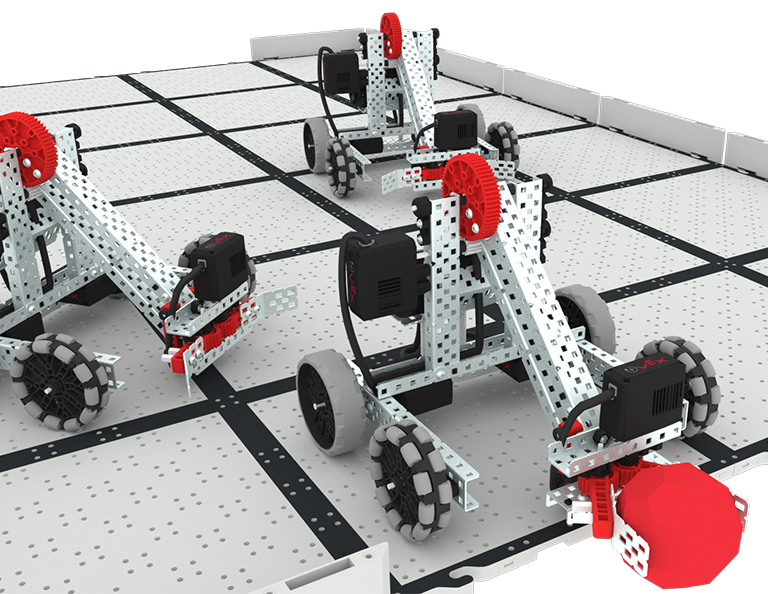
En esta unidad, explorarás cómo diseñar un Clawbot para recolectar, recoger y mover Buckyballs de un lado del campo al otro, en la competencia Up and Over.
Visite el Portal del Maestro para obtener materiales y videos de apoyo para maestros sobre el contenido y la facilitación de Up and Over Lessons.
Lección 1: Introducción
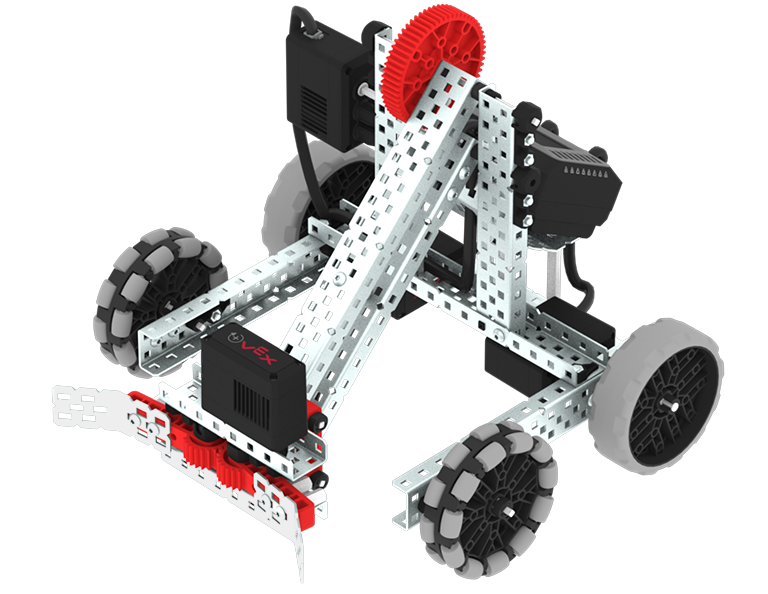
En esta lección, se le presentará la competencia Up and Over, configurará la batería y el controlador, se preparará para codificar y construirá el Clawbot.
Lección 2: Diseño de garras
En esta lección, aprenderás qué es una garra, cómo funciona una garra efectiva y cómo la exploración puede beneficiar los diseños y la estrategia de tu equipo. Luego, aplicarás lo que has aprendido en el desafío Grab and Go.
Lección 3: Diseños de brazos
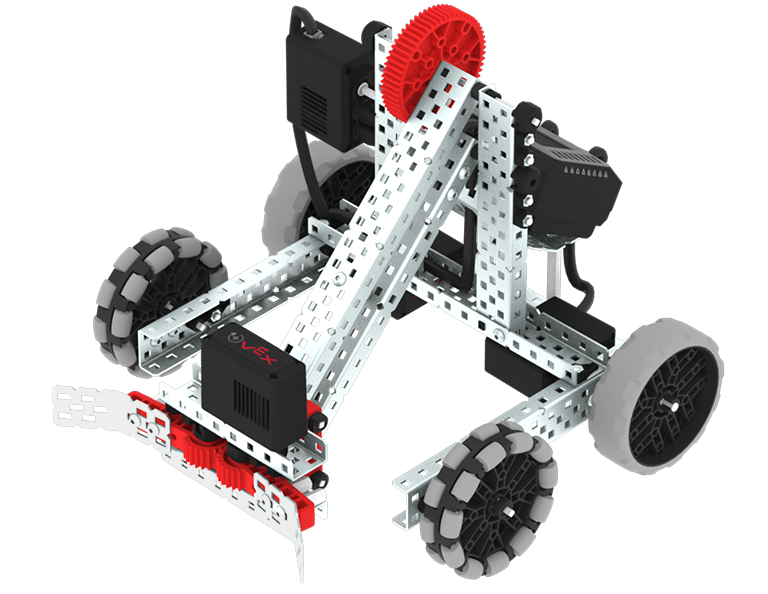
En esta lección, aprenderás sobre los diferentes elementos de los brazos robóticos, incluyendo cómo funcionan y qué hace que un diseño de brazo sea efectivo. Luego, diseñarás y construirás un brazo para que tu robot apile las Buckyballs en anillos para el desafío Stacked Up.
Lección 4: Grupos motores
En esta lección, aprenderá qué son los grupos motores, cómo pueden ser útiles y cómo configurar grupos motores en VEXcode EXP para iterar en su robot y completar el desafío Up and Over.
Lección 5: Arriba y por encima de la competencia
¡En esta lección, aplicarás tu aprendizaje de las lecciones anteriores para competir en la competencia Up and Over!

Lección 6: Conclusión
En esta Lección, reflexionará sobre la Unidad e identificará las conexiones entre lo que ha hecho y una carrera STEM.
fútbol robot
4 Lecciones
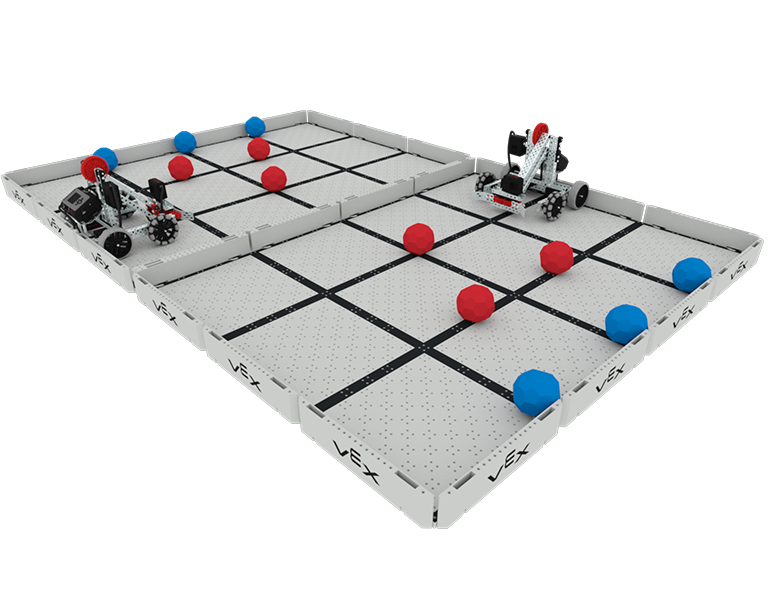
En esta unidad, explorarás cómo crear un manipulador en tu robot para agarrar, pasar y marcar la mayor cantidad de goles como jugador de fútbol robot en la competencia Robot Soccer.
Visite el Portal del Maestro para obtener materiales y videos de apoyo para maestros sobre el contenido y la facilitación de las Lecciones de Robot Soccer.
Lección 1: Introducción
En esta lección, construirás el Clawbot, cargarás tu controlador y batería y te prepararás para codificar.

Lección 2: Manipuladores
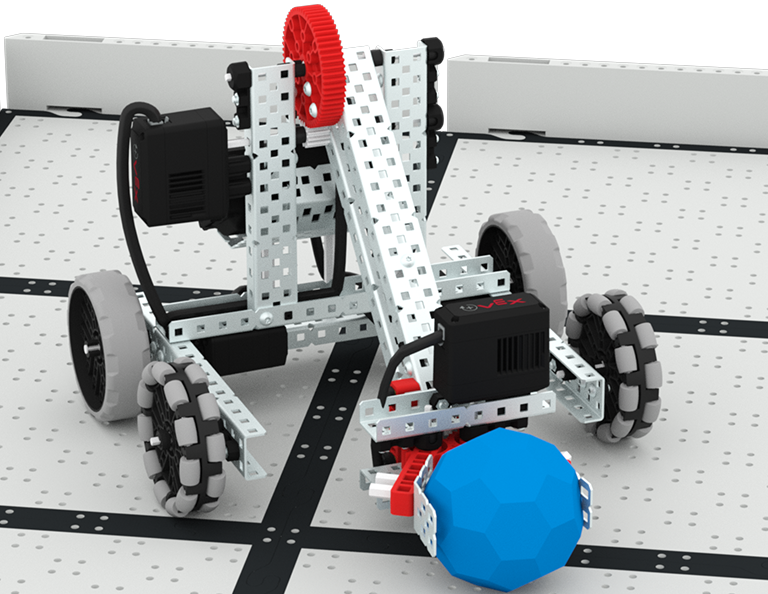
¡En esta Lección, aprenderá sobre los manipuladores pasivos y activos y el diseño de admisión, para iterar en el diseño de su robot y competir en un desafío de Fútbol Robótico Uno a Uno!
Lección 3: Competición de Robot de Fútbol
¡En esta lección, aplicarás tu aprendizaje de la lección anterior para competir en la competencia de Robot Soccer!
Lección 4: Conclusión
En esta Lección, reflexionará sobre la Unidad e identificará las conexiones entre lo que ha hecho y una carrera STEM conectada.

Arriba y más
6 Lecciones
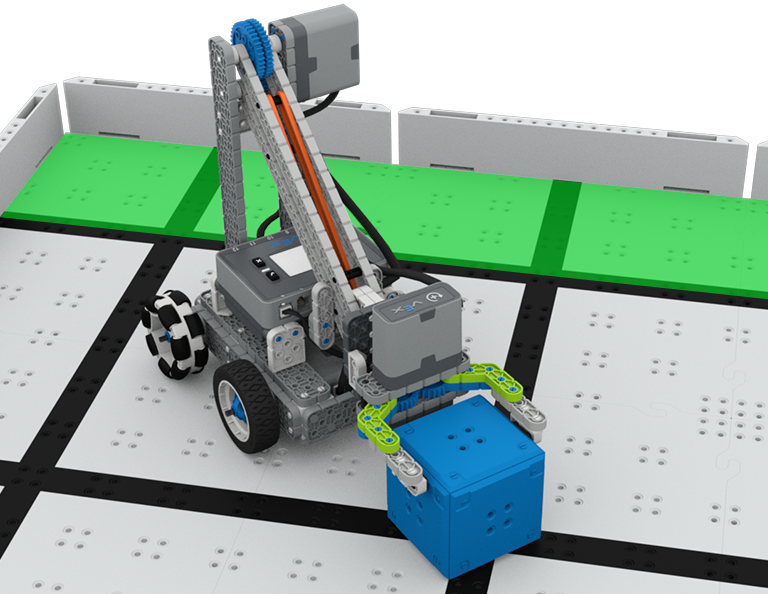
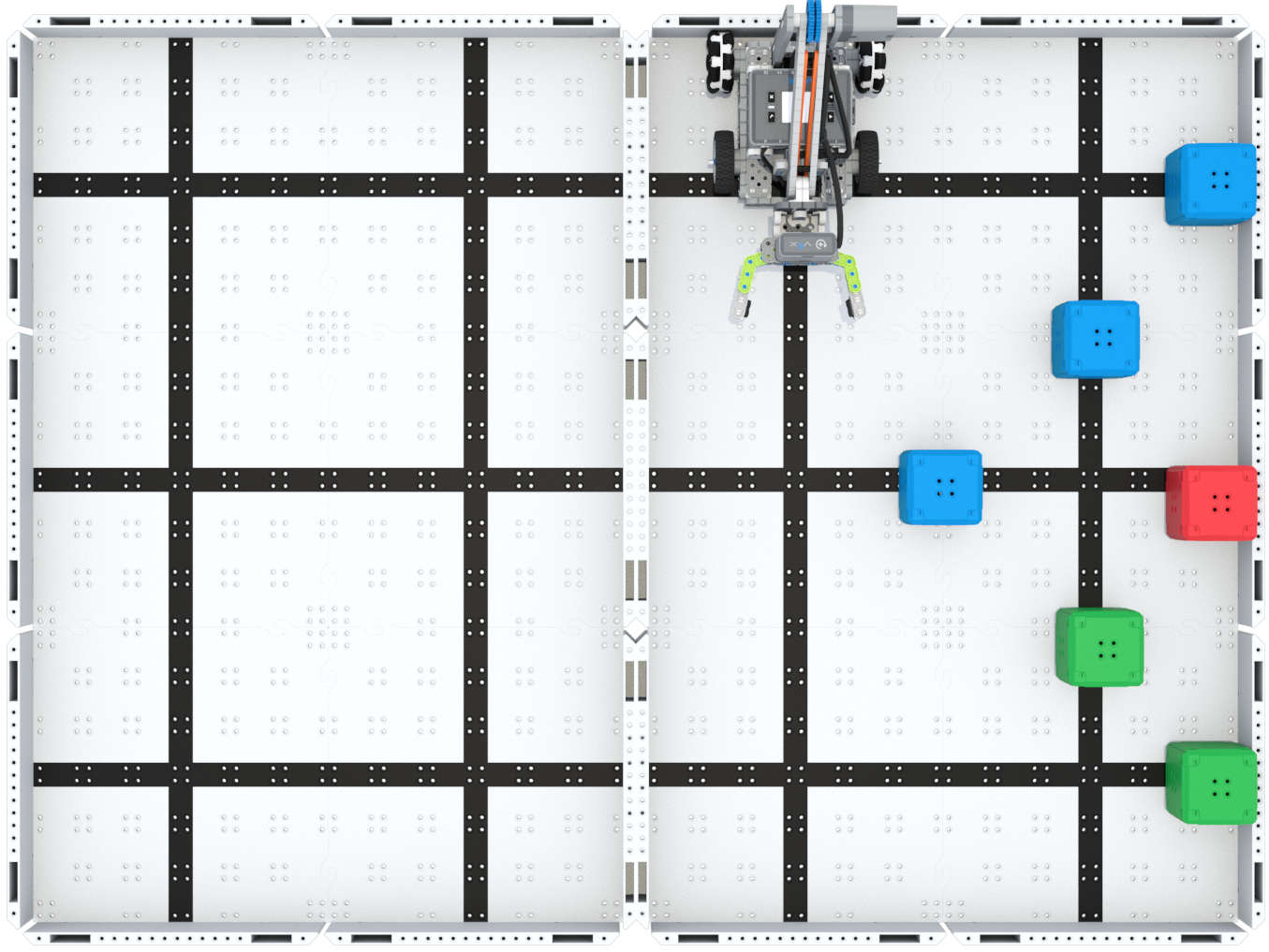
En esta unidad, explorarás cómo diseñar un Clawbot para recolectar, recoger y mover cubos de un lado del campo al otro, en la competencia Up and Over.
Visite el Portal del Maestro para obtener materiales y videos de apoyo para maestros sobre el contenido y la facilitación de Up and Over Lessons.

Lección 1: Introducción
En esta lección, se le presentará la competencia Up and Over, configurará la batería y el controlador, se preparará para codificar y construirá el Clawbot.
Lección 2: Diseño de garras
En esta lección, aprenderás qué es una garra, cómo funciona una garra efectiva y cómo la exploración puede beneficiar los diseños y la estrategia de tu equipo. Luego, aplicarás lo que has aprendido en el desafío Grab and Go.
Lección 3: Diseños de brazos
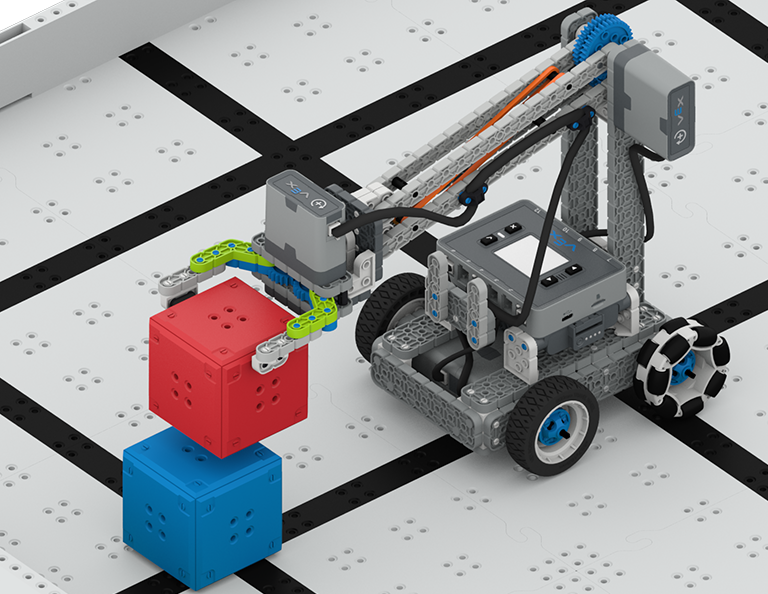
En esta lección, aprenderás sobre los diferentes elementos de los brazos robóticos, cómo funcionan y qué hace que un diseño de brazo sea efectivo, para apilar tantos cubos como puedas en un minuto en el desafío Apilado.
Lección 4: Grupos motores
En esta lección, aprenderá qué son los grupos motores, cómo pueden ser útiles y cómo configurar los grupos motores en VEXcode IQ para iterar en su robot y completar el desafío Up and Over.
Lección 5: Arriba y por encima de la competencia
¡En esta lección, aplicarás tu aprendizaje de las lecciones anteriores para competir en la competencia Up and Over!

Lección 6: Conclusión
En esta Lección, reflexionará sobre la Unidad e identificará las conexiones entre lo que ha hecho y una carrera STEM.
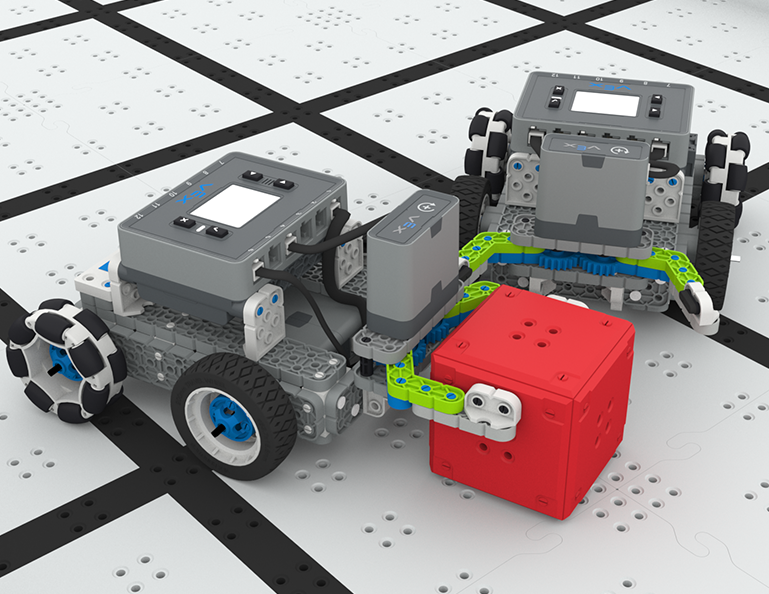
fútbol robot
4 Lecciones
En esta unidad, explorarás cómo crear un manipulador en tu robot para agarrar, pasar y marcar la mayor cantidad de goles como jugador de fútbol robot en la competencia Robot Soccer.
Visite el Portal del Maestro para obtener materiales y videos de apoyo para maestros sobre el contenido y la facilitación de las Lecciones de Robot Soccer.
Lección 1: Introducción
En esta lección, construirás el Simple Clawbot, cargarás tu controlador y batería y te prepararás para codificar.
Lección 2: Manipuladores
En esta lección, aprenderá sobre manipuladores pasivos y activos y diseño de admisión, para poder repetir el diseño de su robot y competir en un desafío de fútbol de robots uno a uno.
Lección 3: Competición de Robot de Fútbol
¡En esta lección, aplicarás tu aprendizaje de la lección anterior para competir en la competencia de Robot Soccer!
Lección 4: Conclusión
En esta Lección, reflexionará sobre la Unidad e identificará las conexiones entre lo que ha hecho y una carrera STEM conectada.

Coleccionista de cubos
6 Lecciones
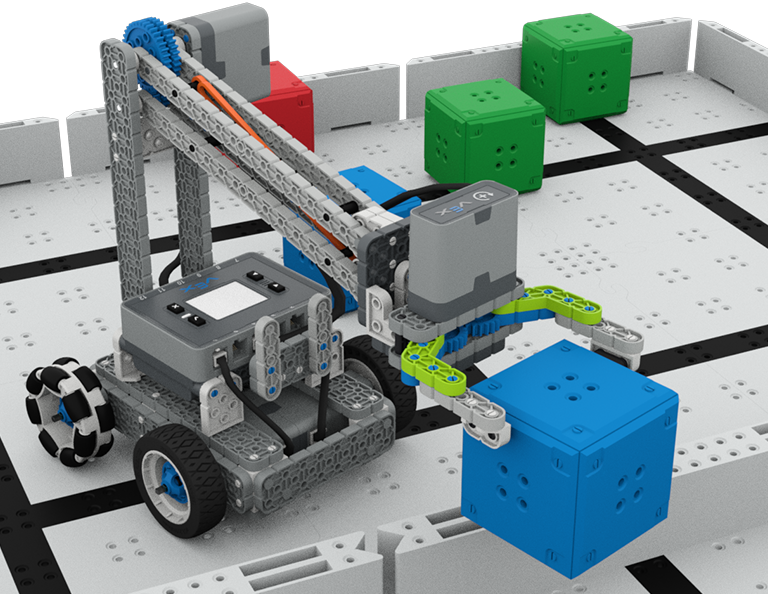
En esta unidad, explorarás la diferencia entre el control del conductor y los desafíos autónomos, mientras aprendes a conducir el Clawbot y a codificarlo para clasificar y apilar cubos en la competencia Cube Collector.
Visite el Portal del profesor para obtener materiales y vídeos de apoyo para profesores sobre el contenido y la facilitación de las lecciones de Cube Collector.
Lección 1: Introducción
En esta lección, conocerás el concurso de coleccionistas de cubos, construirás el Clawbot y te prepararás para programar.

Lección 2: Control del conductor
En esta lección, aprenderás a usar el programa Driver Control en el IQ Brain para que puedas conducir el Clawbot para apilar y puntuar cubos en el campo y participar en el Speed Stack Challenge.

Lección 3: Codificación para movimientos autónomos
En esta lección, aprenderás a codificar tu robot para movimientos autónomos, incluida la forma de planificar la trayectoria de tu robot. A continuación, crearás un proyecto VEXcode IQ para puntuar y apilar cubos en el desafío autónomo Coding for Cubes.

Lección 4: Uso de múltiples programas (autónomo y conductor)
En esta lección, aprenderá sobre la personalización de los controles del conductor y cómo puede usar el controlador y VEXcode IQ para optimizar su estrategia de conductor para competir en un desafío con el control del conductor y las carreras autónomas.

Lección 5: Concurso de coleccionistas de cubos
¡En esta lección, aplicarás tu aprendizaje de las lecciones anteriores para competir en el concurso de coleccionistas de cubos!

Lección 6: Conclusión
En esta Lección, reflexionará sobre la Unidad e identificará las conexiones entre lo que ha hecho y una carrera STEM relacionada.

Destructor de castillos
6 Lecciones
En esta unidad, explorarás cómo usar los sensores ópticos y de distancia para buscar, estrellar y despejar "castillos" de cubos para ganar puntos en la competencia Castle Crasher.
Visite el Portal del maestro para obtener materiales y videos de apoyo para maestros sobre el contenido y la facilitación de las lecciones de Castle Crasher.

Lección 1: Introducción
En esta lección, te presentaremos la competencia Castle Crasher, construirás el BaseBot y te prepararás para codificar.

Lección 2: Castle Crasher sin sensores
En esta lección, aprenderás a calcular ángulos y cambiar la velocidad de tu robot para que puedas competir en el Tower Over Challenge.

Lección 3: Castle Crasher + Sensor de distancia
En esta lección, aprenderá qué es el sensor de distancia y cómo se puede usar en su robot. También aprenderá sobre el bloque [Esperar hasta] y cómo se puede usar en un proyecto VEXcode IQ. ¡Entonces aplicarás lo que has aprendido para competir en el Cube Crasher Challenge!

Lección 4: Creación de algoritmos
En esta lección, aprenderá sobre el sensor óptico y sobre cómo crear un algoritmo que utilice la retroalimentación del sensor. Luego codificarás tu robot para encontrar cubos de forma autónoma y empujarlos fuera del campo en el Desafío de barrer el campo.

Lección 5: Concurso de demolición de castillos
¡En esta lección aplicarás tu aprendizaje de las lecciones anteriores para competir en una competencia de Castle Crasher!
Lección 6: Conclusión
En esta Lección, reflexionará sobre la Unidad e identificará las conexiones entre lo que ha hecho y una carrera STEM.
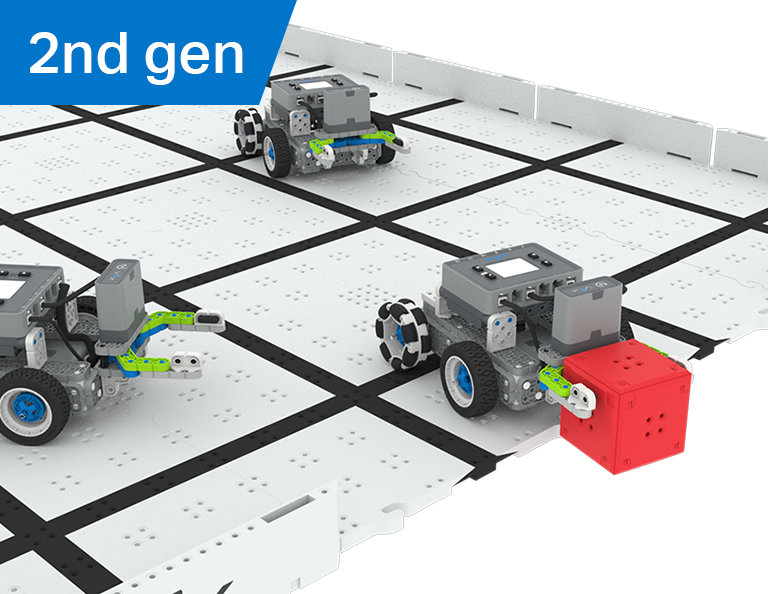
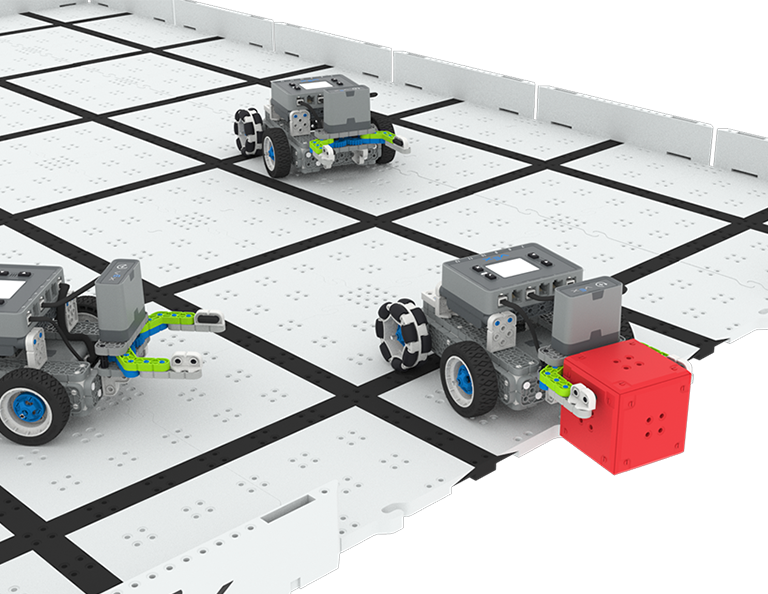
Búsqueda del tesoro
5 Lecciones
En esta unidad, construirás y codificarás el Simple Clawbot con el sensor óptico para reconocer y recolectar cubos rojos para competir en la competencia Treasure Hunt.
Visite el Portal del Maestro para obtener materiales y videos de apoyo para maestros sobre el contenido y la facilitación de las Lecciones de Búsqueda del Tesoro.
Lección 1: Introducción
Se te presentará la competencia Búsqueda del Tesoro, construirás el Simple Clawbot y te prepararás para codificar.
Lección 2: Garra sin sensor
En esta lección, aprenderás a usar bloques de transmisión y movimiento en VEXcode IQ para codificar tu Simple Clawbot para recolectar y mover cubos en el desafío Clawbot Collector.
Lección 3: Garra con sensor
¡En esta lección, aprenderás a codificar el sensor óptico para detectar, recopilar y mover un cubo rojo en el desafío del motor del tesoro!
Lección 4: Competencia de búsqueda del tesoro
¡En esta Lección aplicarás tu aprendizaje de las Lecciones anteriores para competir en una competencia de Búsqueda del Tesoro!
Lección 5: Conclusión
En esta Lección, reflexionará sobre la Unidad e identificará las conexiones entre lo que ha hecho y una carrera STEM.