
![]() Esquema de actividades
la caja de herramientas para docentes
Esquema de actividades
la caja de herramientas para docentes
-
Esta exploración presentará a los estudiantes la programación básica del motor de garra del V5 Clawbot.
-
Aprender a programar el motor Claw permite a los estudiantes controlar adecuadamente cómo el V5 Clawbot agarra los objetos de su entorno. Para obtener más información sobre los bloques utilizados, visita la información de ayuda .
¡El V5 Clawbot está listo para agarrar!
Esta exploración te permitirá comenzar a crear algunos proyectos geniales que utilizan la garra del V5 Clawbot para agarrar objetos.
- El código VEX V5 que se utilizará en esta exploración incluye:

- Para obtener más información sobre el bloque, abra la Ayuda y luego seleccione el bloque [Girar para] .

- Asegúrate de tener el hardware necesario, tu cuaderno de ingeniería y VEXcode V5 descargado y listo.
![]() Consejos para profesores
Consejos para profesores
Si es la primera vez que el estudiante utiliza VEXcode V5, puede consultar los Tutoriales en cualquier momento durante esta exploración. Los tutoriales se encuentran en la barra de herramientas.

| Cantidad | Materiales necesarios |
|---|---|
| 1 |
Kit de inicio para aulas VEX V5 (con firmware actualizado) |
| 1 |
Código VEX V5 |
| 1 |
Cuaderno de ingeniería |
| 1 |
Ejemplo de proyecto de plantilla de Clawbot (transmisión de 2 motores, sin giroscopio) |
| 1 |
Lata de aluminio |
Paso 1: Preparación para la exploración
Antes de comenzar la actividad, ¿tienes cada uno de estos elementos listos? Marque cada uno de los siguientes:
-
¿Están los motores conectados a los puertos correctos?
-
¿Están los cables inteligentes completamente insertados en todos los motores?
-
¿El cerebro está encendido?
![]() Consejos para profesores
Consejos para profesores
Modele cada uno de los pasos de solución de problemas para los estudiantes.
Paso 2: Iniciar un nuevo proyecto
Antes de comenzar su proyecto, seleccione la plantilla de proyecto correcta. El proyecto de ejemplo de plantilla Clawbot (transmisión de 2 motores, sin giroscopio) contiene la configuración del motor de Clawbot. Si no se utiliza la plantilla, su robot no ejecutará el proyecto correctamente.

Complete los siguientes pasos:
- Abra el menú Archivo.
- Seleccionar Abrir Ejemplos.

- Seleccione y abra el proyecto de ejemplo de plantilla Clawbot (transmisión de 2 motores, sin giroscopio).
- Dado que vamos a programar para controlar la garra, cambie el nombre de su proyecto ClawControl.
- Guarda tu proyecto.
- Verifique que el nombre del proyecto ClawControl esté ahora en la ventana en el centro de la barra de herramientas.

![]() Consejos para profesores
Consejos para profesores
-
Dado que esta es una actividad inicial con programación, el profesor debe modelar los pasos y luego pedir a los estudiantes que completen las mismas acciones. Luego, el profesor debe supervisar a los estudiantes para asegurarse de que estén siguiendo los pasos correctamente.
-
Asegúrese de que los estudiantes hayan seleccionado Abrir ejemplos en el menú Archivo.
-
Asegúrese de que los estudiantes hayan seleccionado el proyecto de ejemplo de plantilla Clawbot (transmisión de 2 motores, sin giroscopio) .
Puede señalar a los estudiantes que hay varias selecciones para elegir en la página Ejemplos . A medida que construyan y utilicen otros robots, tendrán la oportunidad de utilizar diferentes plantillas.
-
Puede pedir a los estudiantes que agreguen sus iniciales o el nombre de su grupo al nombre del proyecto. Esto ayudará a diferenciar los proyectos si pide a los estudiantes que los presenten.
![]() Caja de herramientas para docentes
-
Detenerse y debatir
Caja de herramientas para docentes
-
Detenerse y debatir
Este es un buen punto para hacer una pausa y que los grupos de estudiantes revisen los pasos que se acaban de completar al iniciar un nuevo proyecto en VEXcode V5.
Paso 3: Programa la garra V5 para que se abra
¡Ahora vamos a comenzar programando la garra para que se abra!
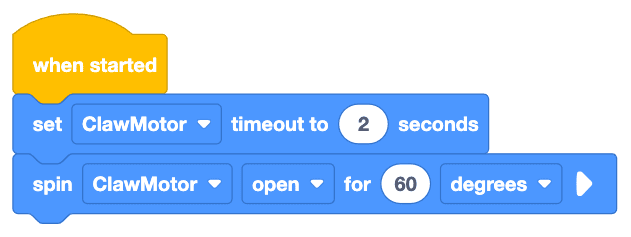
- Agregue los {When started} [Girar durante] del tiempo de espera motor y al bloquey configure sus parámetros como se muestra arriba.
- Tenga en cuenta que el bloque set motor timeout aparece primero en la pila. Establece cuánto tiempo puede funcionar el motor de garra y lo detiene después de ese tiempo.
- El bloque de tiempo de espera del motor en este proyecto está establecido en 2 segundos. Entonces, incluso si el motor no se mueve 60 grados completos, el proyecto detiene el motor de garra después de que hayan pasado 2 segundos.

- Mire el tutorial de apertura de la garra en VEXcode V5 si desea una demostración.

- Haga clic en el ícono Ranura . Puedes descargar tu proyecto a uno de los espacios disponibles en Robot Brain. Haga clic en la ranura 1.

- Conecta el robot a tu ordenador o tableta. El icono del cerebro en la barra de herramientas se vuelve verde después de que se haya realizado una conexión exitosa.

- Haga clic en el botón Descargar en la barra de herramientas para descargar el proyecto Drive al Robot Brain.

- Verifique que el proyecto ClawControl se haya descargado en el cerebro en la ranura que eligió.
![]() Caja de herramientas para docentes
-
Opción para modelar primero
Caja de herramientas para docentes
-
Opción para modelar primero
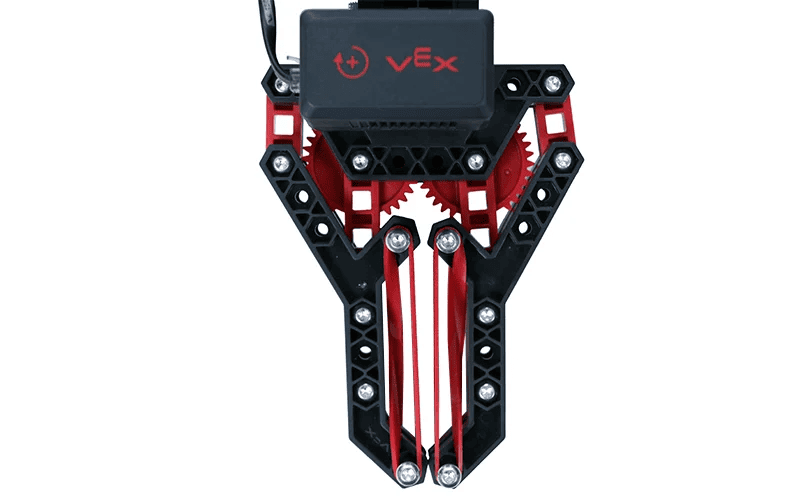
Modele la ejecución del proyecto frente a la clase antes de que todos los estudiantes lo intenten a la vez. Reúna a los estudiantes en un área y coloque el Clawbot de manera que todos puedan ver su garra. Si planea demostrar más de una vez, puede cerrar suavemente la garra entre las ejecuciones.
Dígales a los estudiantes que ahora es su turno de ejecutar sus proyectos.
- Ejecute el proyecto en Clawbot asegurándose de que el proyecto esté seleccionado y luego presione el botón Ejecutar. ¡Felicitaciones por crear tu primer proyecto para mover la Garra!
Paso 4: Pruebe esto: Cierre la garra V5
Ahora que has programado la garra para que se abra, ahora la programarás para que se cierre.
![]() Ahora que puedes abrir la garra, querrás cerrarla también.
Ahora que puedes abrir la garra, querrás cerrarla también.
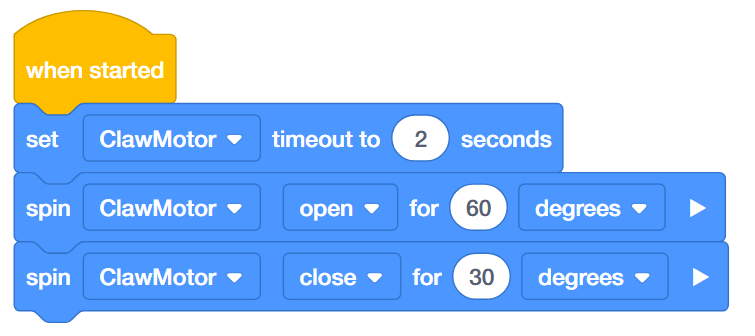
- Regrese a su proyecto ClawControl y agregue un bloque [Girar por] para que el motor de garra gire cerrado durante 30 grados. La garra debería cerrarse hasta la mitad porque giró 60 grados para abrirse.
- Pruebe que su proyecto revisado tiene la garra abierta a 60 grados y luego cerrada a 30 grados descargando y ejecutando su proyecto ClawControl.
![]() Caja de herramientas para docentes
-
Solución
Caja de herramientas para docentes
-
Solución
Anteriormente, la garra se abría 60 grados. En ese proyecto se incluyó un bloque de tiempo de espera del motor porque es una práctica importante establecer un tiempo de espera cuando se alimenta un manipulador cuyo movimiento podría restringirse de alguna manera. Establecer un tiempo de espera evita el desgaste innecesario del motor.
La siguiente es la solución de este paso:
Paso 5: Pruebe esto: Secuenciar múltiples movimientos
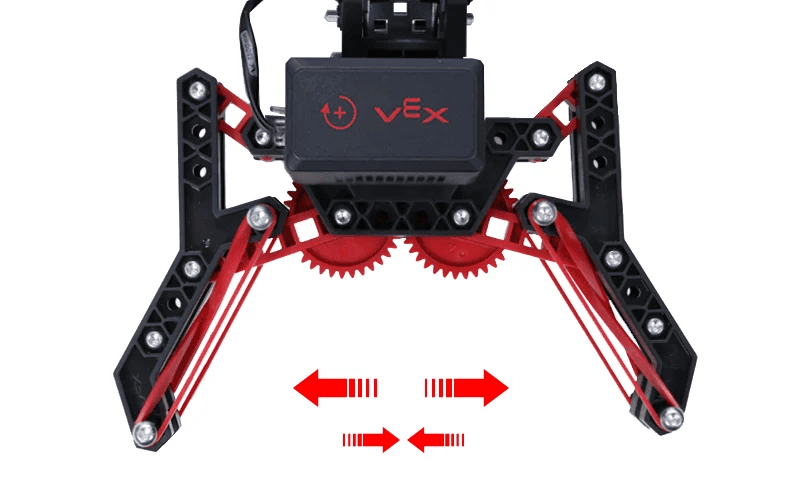
![]() No todo lo que recojas con la garra tendrá el mismo tamaño. Intente abrir la garra en diferentes posiciones a lo largo del rango de movimiento.
No todo lo que recojas con la garra tendrá el mismo tamaño. Intente abrir la garra en diferentes posiciones a lo largo del rango de movimiento.
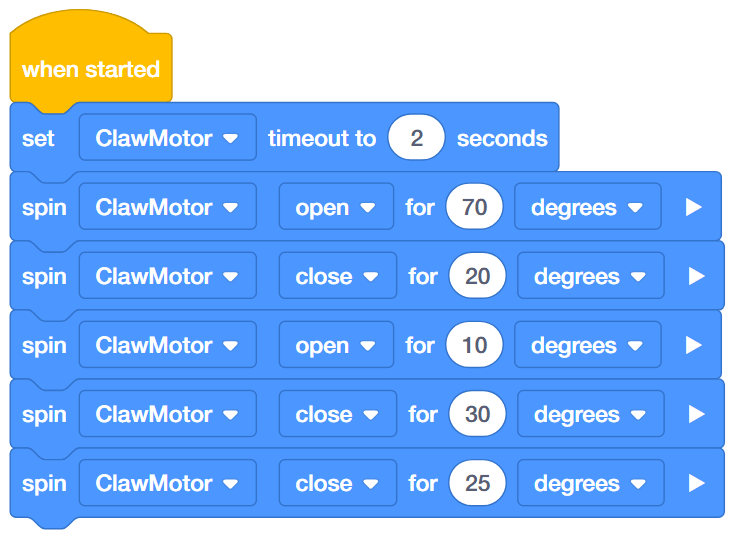
- Gire el motor para:
- Abierto a 70 grados
- Cerrar por 20 grados
- Abierto a 10 grados
- Cerrar por 30 grados
- Cerrar por 25 grados
- Recuerde utilizar el bloque [Establecer tiempo de espera del motor] para establecer un tiempo de espera de 2 segundos.
- Si el motor de garra comienza en 0 grados, ¿cuántos grados estará abierto el motor de garra al final del proyecto?
![]() Caja de herramientas para docentes
-
Solución
Caja de herramientas para docentes
-
Solución
La solución a este paso se presenta a continuación.
El motor de garra todavía está abierto a 5 grados al final del proyecto: 70 - 20 = 50 -> 50 + 10 = 60 -> 60 - 30 = 30 -> 30 - 25 = 5 grados.
Paso 6: Completar el desafío Lock Tight

![]()
Programe el Clawbot para cerrar de forma segura la garra de una lata de aluminio vacía de 12 onzas sin aplastar los lados.
- Haga que Clawbot sostenga la lata mientras sube y baja su brazo 45 grados.
- Luego, el Clawbot debería soltar la lata y alejarse de ella.
- Comienza el desafío con una garra abierta y una lata vacía dentro de ella.
![]() Consejos para profesores
Consejos para profesores
-
Haga que los estudiantes comiencen el desafío con una garra abierta y una lata vacía dentro de ella.
-
Si la lata se aplasta o se cae de la garra, se debe reiniciar el desafío después de ajustar el proyecto.
![]() Caja de herramientas para docentes
-
Solución
Caja de herramientas para docentes
-
Solución
He aquí un ejemplo de solución:
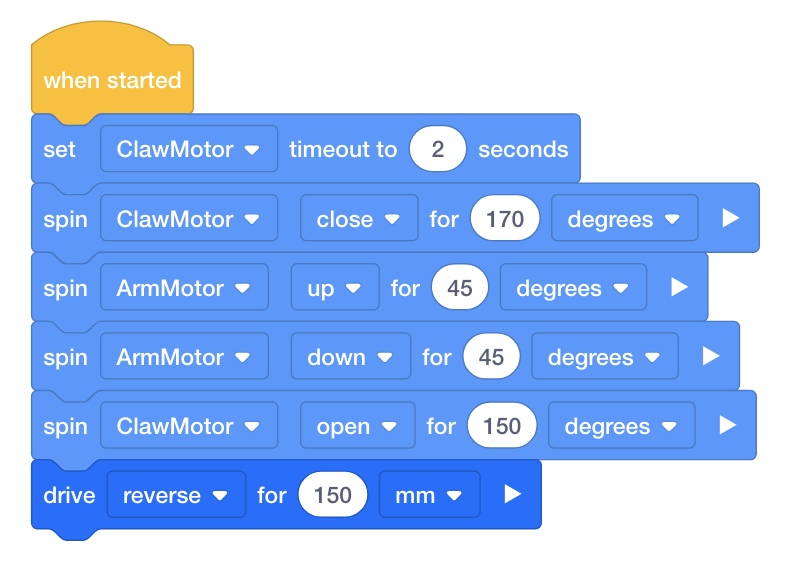
- El proyecto establece el tiempo de espera, cierra la garra alrededor de la lata, levanta y baja la lata, la libera y luego retrocede.
- Rúbrica de programación (Google Doc / .docx / .pdf )