
![]() Caixa de ferramentas do professor
-
Esboço da atividade
Caixa de ferramentas do professor
-
Esboço da atividade
-
Esta exploração apresentará aos alunos a programação básica do Claw Motor do V5 Clawbot.
-
Aprender a programar o Claw Motor permite aos alunos controlar adequadamente a forma como o V5 Clawbot agarra os objetos no seu ambiente. Para mais informações sobre os blocos utilizados, aceda às informações de ajuda .
O V5 Clawbot está pronto a ser utilizado!
Esta exploração permitir-lhe-á começar a criar alguns projetos interessantes que utilizam a garra do V5 Clawbot para agarrar objetos.
- VEXcode V5 que será utilizado nesta exploração inclui:

- Para saber mais informações sobre o bloco, abra a Ajuda e seleccione o bloco [Spin for] .

- Certifique-se de que tem o hardware necessário, o seu portátil de engenharia e o VEXcode V5 descarregados e está feito.
![]() Dicas para professores
Dicas para professores
Se esta for a primeira vez que o aluno utiliza o VEXcode V5, poderá consultar os Tutoriais em qualquer momento durante esta exploração. Os Tutoriais estão localizados na barra de ferramentas.

| Quantidade | Materiais necessários |
|---|---|
| 1 |
VEX V5 Classroom Starter Kit (com firmware atualizado) |
| 1 |
VEX código V5 |
| 1 |
Caderno de Engenharia |
| 1 |
Exemplo de desenho de modelo Clawbot (transmissão de 2 motores, sem giroscópio) |
| 1 |
Lata de alumínio |
Passo 1: Preparar-se para a Exploração
Antes de iniciar a atividade, tem cada um destes itens prontos? Verifique cada um dos seguintes:
-
Os motores estão ligados nas portas corretas?
-
Os cabos inteligentes estão totalmente inseridos em todos os motores?
-
O Cérebro está ligado?
-
A bateria está carregada?
![]() Dicas para professores
Dicas para professores
Modele cada uma das etapas de resolução de problemas para os alunos.
Passo 2: iniciar um novo projeto
Antes de iniciar o seu projeto, selecione o projeto modelo correto. O projeto de modelo do Clawbot (transmissão de 2 motores, sem giroscópio) contém a configuração do motor do Clawbot. Se o modelo não for utilizado, o seu robô não executará o projeto corretamente.
Conclua os seguintes passos:
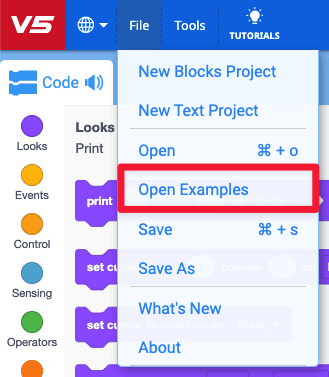
- Abra o menu Ficheiro.
- Selecione Abrir Exemplos.

- Selecione e abra o projeto de modelo Clawbot (Drivetrain 2-motor, No Gyro).
- Como estaremos a programar para controlar a garra, renomeie o seu projeto ClawControl.
- Guarde o seu projeto.
- Verifique se o nome do projeto ClawControl se encontra agora na janela no centro da barra de ferramentas.

![]() Dicas para professores
Dicas para professores
-
Por se tratar de uma atividade inicial com programação, o professor deve modelar as etapas e depois pedir aos alunos que realizem as mesmas ações. O professor deve então monitorizar os alunos para garantir que estão a seguir os passos corretamente.
-
Certifique-se de que os alunos selecionaram Abrir exemplos no menu Ficheiro.
-
Certifique-se de que os alunos selecionaram o projeto de exemplo de modelo Clawbot (Drivetrain 2-motor, No Gyro) .
Pode mostrar aos alunos que existem diversas opções à escolha na página Exemplos . À medida que constroem e utilizam outros robôs, terão a oportunidade de utilizar diferentes modelos.
-
Pode pedir aos alunos que adicionem as suas iniciais ou o nome do grupo ao nome do projeto. Isto ajudará a diferenciar os projetos se pedir aos alunos que os enviem.
![]() Caixa de ferramentas do professor
-
Pare e discuta
Caixa de ferramentas do professor
-
Pare e discuta
Este é um bom ponto para fazer uma pausa e fazer com que os grupos de alunos revejam os passos que acabaram de ser concluídos ao iniciar um novo projeto no VEXcode V5.
Passo 3: Programe a garra V5 para abrir
Agora vamos começar por programar a garra para abrir!
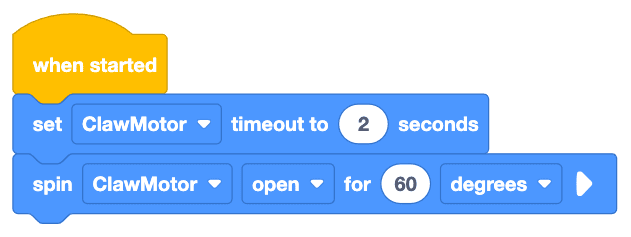
- Adicione os blocos set motor timeout e [Spin for] ao bloco {When started} e defina os seus parâmetros como mostrado acima.
- Note que o bloco set motor timeout aparece em primeiro lugar na pilha. Define durante quanto tempo o Claw Motor pode funcionar e interrompe-o após esse tempo.
- O bloco set motor timeout neste projeto está definido para 2 segundos. Portanto, mesmo que o motor não se mova 60 graus completos, o design pára o motor de garra após 2 segundos.

- Veja o Tutorial de abertura da garra no VEXcode V5 se desejar uma demonstração.

- Clique no ícone Slot . Pode descarregar o seu projeto num dos slots disponíveis no Robot Brain. Clique no Slot 1.

- Ligue o robô ao seu computador ou tablet. O ícone Brain na barra de ferramentas fica verde após ter sido estabelecida uma ligação bem-sucedida.

- Clique no botão Download da barra de ferramentas para descarregar o projeto Drive para o Robot Brain.

- Verifique se o projeto ClawControl foi descarregado para o cérebro no slot que escolheu.
![]() Caixa de ferramentas do professor
-
opção para modelar primeiro
Caixa de ferramentas do professor
-
opção para modelar primeiro
Modele a execução do projeto perante a turma antes de todos os alunos tentarem ao mesmo tempo. Reúna os alunos numa área e posicione o Clawbot de forma a que a sua garra possa ser vista por todos. Se planeia demonstrar mais do que uma vez, pode empurrar suavemente a garra para a fechar entre as corridas.
Diga aos alunos que agora é a vez deles executarem os seus projetos.
- Execute o projeto no Clawbot certificando-se de que o projeto está selecionado e prima o botão Executar. Parabéns por criar o seu primeiro projeto para mover a Garra!
Passo 4: tente isto: feche a garra V5
Agora que já programou a garra para abrir, irá programá-la para fechar.
![]() Agora que já consegue abrir a garra, também vai querer fechá-la.
Agora que já consegue abrir a garra, também vai querer fechá-la.
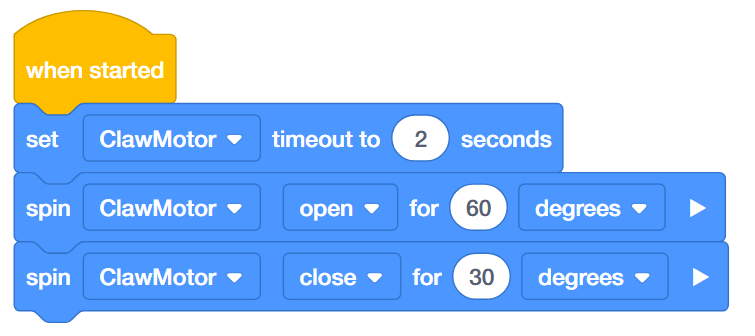
- Volte ao seu projeto ClawControl e adicione um bloco [Spin for] para que o Claw Motor gire fechado 30 graus. A garra deve fechar até meio porque rodou 60 graus.
- Teste se o seu projeto revisto tem a garra aberta a 60 graus e depois fechada a 30 graus, baixando e executando o seu projeto ClawControl.
![]() Caixa de ferramentas do professor
-
solução
Caixa de ferramentas do professor
-
solução
Anteriormente, a garra abria 60 graus. Incluído neste projeto estava um bloco de ajuste do tempo limite do motor porque é uma prática importante definir um tempo limite ao alimentar um manipulador que poderia ter o seu movimento restringido de alguma forma. A definição de um tempo limite evita um desgaste desnecessário do motor.
A seguir é apresentada a solução desta etapa:
Passo 5: Experimente isto: sequenciar vários movimentos
![]() Nem tudo o que apanha com a garra terá o mesmo tamanho. Tente abrir a garra em diferentes posições ao longo da amplitude de movimento.
Nem tudo o que apanha com a garra terá o mesmo tamanho. Tente abrir a garra em diferentes posições ao longo da amplitude de movimento.
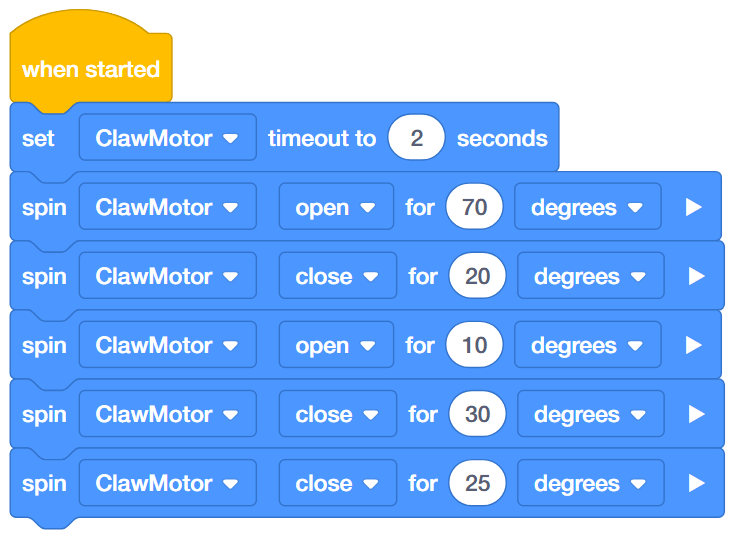
- Rode o motor para:
- Aberto por 70 graus
- Fechar por 20 graus
- Aberto por 10 graus
- Fechar por 30 graus
- Fechar por 25 graus
- Lembre-se de utilizar o bloco [Set motor timeout] para definir um timeout de 2 segundos.
- Se o Claw Motor arrancar a 0 graus, quantos graus estará o Claw Motor aberto no final do projeto?
![]() Caixa de ferramentas do professor
-
solução
Caixa de ferramentas do professor
-
solução
A solução para esta etapa é apresentada de seguida.
O Motor de Garra ainda está aberto a 5 graus no final do projecto: 70 - 20 = 50 --> 50 + 10 = 60 --> 60 - 30 = 30 --> 30 - 25 = 5 graus.
Passo 6: Concluindo o Desafio Lock Tight

![]()
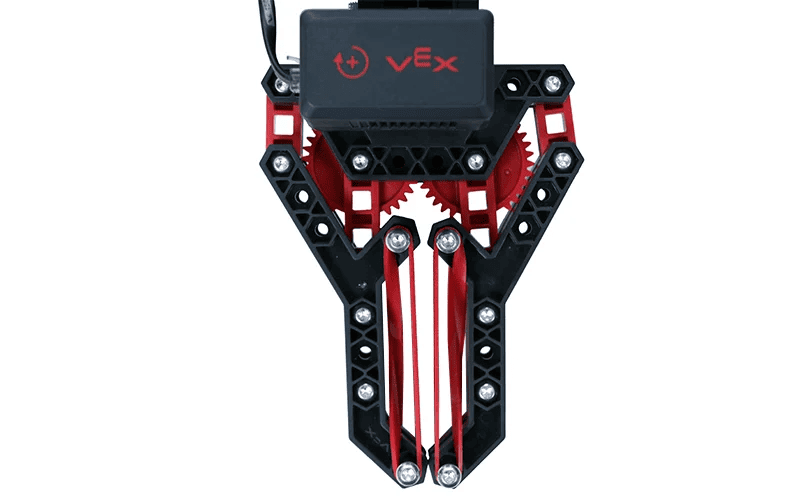
Programe o Clawbot para fechar com segurança a garra numa lata de alumínio vazia de 12 onças sem esmagar as laterais.
- Faça com que o Clawbot segure a lata enquanto levanta e baixa o braço 45 graus.
- O Clawbot deve então largar a lata e afastar-se dela.
- Comece o desafio com uma garra aberta e uma lata vazia no seu interior.
![]() Dicas para professores
Dicas para professores
-
Peça aos alunos que iniciem o desafio com uma garra aberta e uma lata vazia no seu interior.
-
Caso a lata seja esmagada ou caia da garra, o desafio deverá ser reiniciado após o ajuste do projeto.
![]() Caixa de ferramentas do professor
-
solução
Caixa de ferramentas do professor
-
solução
Eis um exemplo de solução:
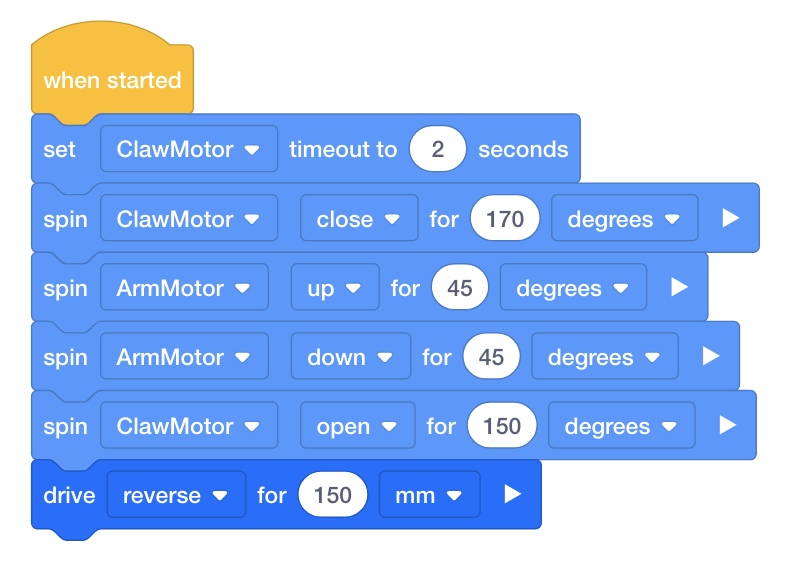
- O projeto define o tempo limite, fecha a garra à volta da lata, levanta e baixa a lata, liberta-a e depois recua.
- Rubrica de Programação (Google Doc .pdf