
![]() Boîte à outils de l'enseignant
-
Plan d'activité
Boîte à outils de l'enseignant
-
Plan d'activité
-
Cette exploration présentera aux étudiants la programmation de base du moteur à griffes du V5 Clawbot.
-
Apprendre à programmer le moteur à griffes permet aux élèves de contrôler correctement la façon dont le V5 Clawbot saisit les objets dans son environnement. Pour plus d'informations sur les blocs utilisés, consultez les informations d'aide .
Le Clawbot V5 est prêt à saisir !
Cette exploration vous permettra de commencer à créer des projets sympas qui utilisent la griffe du Clawbot V5 pour saisir des objets.
- Les VEXcode V5 qui seront utilisés dans cette exploration incluent :

- Pour en savoir plus sur le bloc, ouvrez l'Aide, puis sélectionnez le bloc [Tourner pour] .

- Assurez-vous d'avoir le matériel requis, votre cahier d'ingénierie et VEXcode V5 téléchargé et prêt.
![]() Conseils pour les enseignants
Conseils pour les enseignants
Si c'est la première fois que l'étudiant utilise VEXcode V5, il peut se référer aux tutoriels à tout moment au cours de cette exploration. Les tutoriels sont situés dans la barre d'outils.

| Quantité | Matériel nécessaire |
|---|---|
| 1 |
Kit de démarrage pour salle de classe VEX V5 (avec micrologiciel à jour) |
| 1 |
Code VEX V5 |
| 1 |
Cahier d'ingénierie |
| 1 |
Exemple de projet de modèle Clawbot (transmission à 2 moteurs, sans gyroscope) |
| 1 |
Canette en aluminium |
Étape 1 : Préparation de l'exploration
Avant de commencer l’activité, avez-vous chacun de ces éléments prêts ? Vérifiez chacun des éléments suivants :
-
Les moteurs sont-ils branchés sur les bons ports ?
-
Les câbles intelligents sont-ils complètement insérés dans tous les moteurs ?
-
Le cerveau est-il allumé?
-
La batterie est-elle chargée?
![]() Conseils pour les enseignants
Conseils pour les enseignants
Modélisez chacune des étapes de dépannage pour les élèves.
Étape 2 : Démarrer un nouveau projet
Avant de commencer votre projet, sélectionnez le modèle de projet approprié. L'exemple de projet de modèle Clawbot (Drivetrain 2-motor, No Gyro) contient la configuration du moteur du Clawbot. Si le modèle n'est pas utilisé, votre robot n'exécutera pas le projet correctement.

Procédez comme suit :
- Ouvrez le menu Fichier.
- Sélectionner Ouvrir Exemples.

- Sélectionnez et ouvrez l'exemple de projet de modèle Clawbot (Drivetrain 2-motor, No Gyro).
- Puisque nous allons programmer pour contrôler la griffe, renommez votre projet ClawControl.
- Enregistrez votre projet.
- Vérifiez que le nom du projet ClawControl est maintenant dans la fenêtre au centre de la barre d’outils.

![]() Conseils pour les enseignants
Conseils pour les enseignants
-
Puisqu’il s’agit d’une activité d’initiation à la programmation, l’enseignant doit modéliser les étapes, puis demander aux élèves d’effectuer les mêmes actions. L’enseignant doit ensuite surveiller les élèves pour s’assurer qu’ils suivent correctement les étapes.
-
Assurez-vous que les élèves ont sélectionné Ouvrir les exemples dans le menu Fichier.
-
Assurez-vous que les élèves ont sélectionné l'exemple de projet de modèle Clawbot (Drivetrain 2 moteurs, sans gyroscope) .
Vous pouvez signaler aux élèves qu’il existe plusieurs sélections parmi lesquelles choisir sur la page Exemples . Au fur et à mesure qu’ils construisent et utilisent d’autres robots, ils auront la possibilité d’utiliser différents modèles.
-
Vous pouvez demander aux élèves d’ajouter leurs initiales ou le nom de leur groupe au nom du projet. Cela aidera à différencier les projets si vous demandez aux étudiants de les soumettre.
![]() Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
C'est le moment idéal pour faire une pause et demander aux groupes d'étudiants de revoir les étapes qui viennent d'être réalisées lors du démarrage d'un nouveau projet dans VEXcode V5.
Étape 3 : Programmez la griffe V5 pour l'ouvrir
Nous allons maintenant commencer par programmer la griffe pour qu'elle s'ouvre !

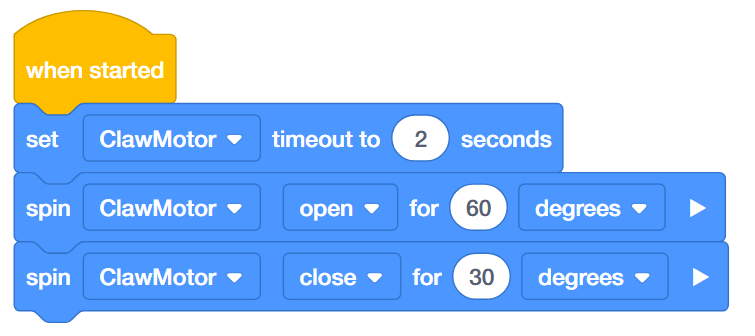
- Ajoutez les blocs Spin for]au bloc {When started} et définissez leurs paramètres comme indiqué ci-dessus.
- Notez que le bloc set motor timeout apparaît en premier dans la pile. Il définit la durée pendant laquelle le moteur à griffes peut fonctionner et l'arrête après ce délai.
- Le bloc set motor timeout de ce projet est défini sur 2 secondes. Ainsi, même si le moteur ne bouge pas de 60 degrés, le projet arrête le moteur à griffes après 2 secondes.

- Regardez le didacticiel d'ouverture de la griffe dans VEXcode V5 si vous souhaitez une démonstration.

- Cliquez sur l'icône Slot . Vous pouvez télécharger votre projet dans l’un des emplacements disponibles dans le Robot Brain. Cliquez sur l'emplacement 1.

- Connectez le robot à votre ordinateur ou tablette. L'icône Cerveau dans la barre d'outils devient verte une fois qu'une connexion a été établie avec succès.

- Cliquez sur le bouton Télécharger dans la barre d’outils pour télécharger le projet Drive sur le Robot Brain.

- Vérifiez que le projet ClawControl a été téléchargé dans le cerveau dans l'emplacement que vous avez choisi.
![]() Boîte à outils de l'enseignant
-
Option pour modéliser en premier
Boîte à outils de l'enseignant
-
Option pour modéliser en premier
Modèle exécutant le projet devant la classe avant de demander à tous les élèves d'essayer en même temps. Rassemblez les élèves dans une zone et positionnez le Clawbot de manière à ce que sa griffe soit visible par tous. Si vous prévoyez de faire plusieurs démonstrations, vous pouvez fermer doucement la griffe entre chaque démonstration.
Dites aux élèves que c'est maintenant leur tour d'exécuter leurs projets.
- Exécutez le projet sur le Clawbot en vous assurant que le projet est sélectionné, puis appuyez sur le bouton Exécuter. Félicitations pour avoir créé votre premier projet de déplacement de la Griffe !
Étape 4 : Essayez ceci : fermez la griffe V5
Maintenant que vous avez programmé la griffe pour s'ouvrir, vous allez maintenant la programmer pour qu'elle se ferme.
![]() Maintenant que vous pouvez ouvrir la griffe, vous voudrez également la fermer.
Maintenant que vous pouvez ouvrir la griffe, vous voudrez également la fermer.
- Revenez à votre projet ClawControl et ajoutez un bloc [Spin for] pour que le moteur à griffes tourne fermé pendant 30 degrés. La griffe devrait se fermer à moitié car elle s'est ouverte à 60 degrés.
- Testez que votre projet révisé a la griffe ouverte à 60 degrés, puis fermez à 30 degrés en téléchargeant et en exécutant votre projet ClawControl.
![]() Boîte à outils pour enseignants
-
solution
Boîte à outils pour enseignants
-
solution
Auparavant, la griffe s'ouvrait à 60 degrés. Ce projet comprenait un bloc de temporisation de moteur défini, car il s'agit d'une pratique importante de définir une temporisation lors de l'alimentation d'un manipulateur dont le mouvement pourrait être restreint d'une manière ou d'une autre. Le réglage d'un délai d'attente évite l'usure inutile d'un moteur.
Voici la solution de cette étape :
Étape 5 : Essayez ceci : séquencer plusieurs mouvements
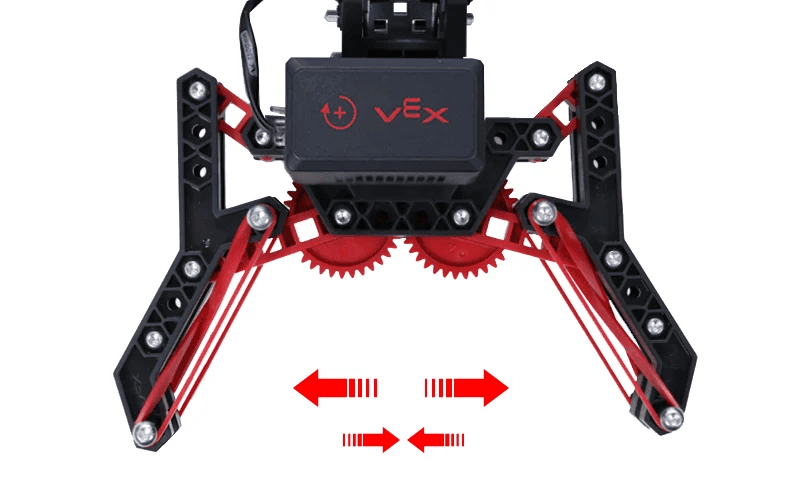
![]() Tout ce que vous ramassez avec la griffe n’aura pas la même taille. Essayez d’ouvrir la griffe dans différentes positions le long de l’amplitude du mouvement.
Tout ce que vous ramassez avec la griffe n’aura pas la même taille. Essayez d’ouvrir la griffe dans différentes positions le long de l’amplitude du mouvement.
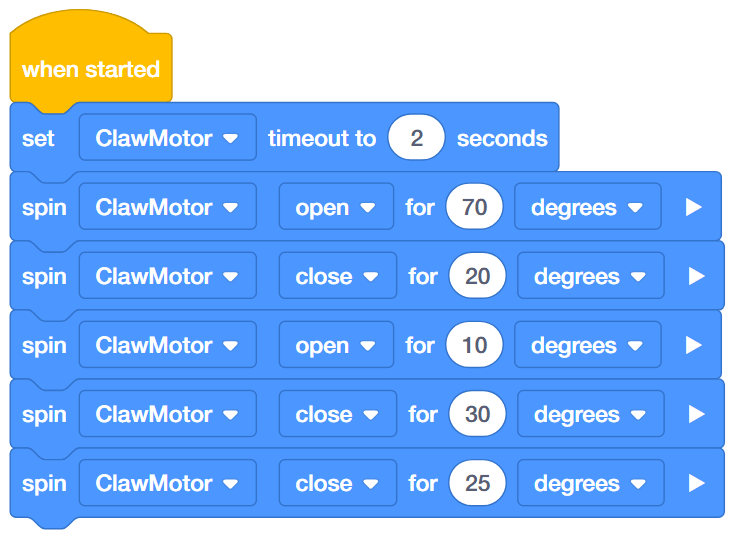
- Faites tourner le moteur pour :
- Ouvert à 70 degrés
- Fermé pour 20 degrés
- Ouvert à 10 degrés
- Fermé pour 30 degrés
- Fermé pour 25 degrés
- N'oubliez pas d'utiliser le bloc [Définir le délai d'expiration du moteur] pour définir un délai d'expiration de 2 secondes.
- Si le moteur à griffes démarre à 0 degré, à combien de degrés le moteur à griffes est-il ouvert à la fin du projet ?
![]() Boîte à outils pour enseignants
-
solution
Boîte à outils pour enseignants
-
solution
La solution à cette étape est présentée ci-dessous.
Le moteur à griffes est toujours ouvert à 5 degrés à la fin du projet : 70 - 20 = 50 --> 50 + 10 = 60 --> 60 - 30 = 30 --> 30 - 25 = 5 degrés.
Étape 6 : Relever le défi Lock Tight

![]()
Programmez le Clawbot pour fermer en toute sécurité la griffe d'une canette en aluminium vide de 12 onces sans écraser les côtés.
- Demandez au Clawbot de tenir la canette pendant qu'il lève et abaisse son bras à 45 degrés.
- Le Clawbot doit alors relâcher la canette et s'éloigner d'elle.
- Commencez le défi avec une griffe ouverte et une canette vide à l'intérieur.
![]() Conseils pour les enseignants
Conseils pour les enseignants
-
Demandez aux élèves de commencer le défi avec une griffe ouverte et une canette vide à l’intérieur.
-
Si la canette est écrasée ou tombe de la griffe, le défi doit être relancé après avoir ajusté le projet.
![]() Boîte à outils pour enseignants
-
solution
Boîte à outils pour enseignants
-
solution
Voici un exemple de solution :
- Le projet définit le délai d'attente, ferme la griffe autour de la canette, soulève et abaisse la canette, la libère, puis recule.
- Rubrique de programmation (Google Doc / .docx / .pdf )