
पृष्ठभूमि
डिजाइनर, इंजीनियर और कंप्यूटर वैज्ञानिक हर दिन समस्याओं का समाधान करने वाले समाधान तैयार करते हैं। इस परेड फ्लोट इकाई में, छात्र एक प्रामाणिक समस्या को हल करने के लिए इंजीनियरिंग डिजाइन प्रक्रिया का उपयोग करेंगे। छात्र यह पता लगाएंगे कि एक स्वायत्त रोबोट परेड फ्लोट को कैसे डिजाइन, निर्माण और कोड किया जाए, ताकि वह परेड मार्ग की वास्तविक दुनिया की बाधाओं की नकल करते हुए भूलभुलैया से गुजर सके।
परेड फ्लोट क्या है?
परेड लोगों का एक बड़ा या छोटा समूह होता है जो एक साथ चलते हैं और अक्सर वेशभूषा पहने होते हैं और उनके पीछे मार्चिंग बैंड और झांकियां चलती हैं। परेड फ्लोट एक सुसज्जित मंच है, जो या तो किसी वाहन पर बनाया जाता है, या किसी वाहन के पीछे खींचा जाता है। परेड अक्सर छुट्टी के दिन या किसी को सम्मानित करने के लिए आयोजित की जाती है, और आमतौर पर यह किसी प्रकार का उत्सव होता है।

यात्रा
पुनरावृत्ति दोहराने की क्रिया या प्रक्रिया के रूप में परिभाषित किया गया है। हमारे उद्देश्यों के लिए, पुनरावृत्ति एक व्यवस्थित, चक्रीय डिजाइन लूप है जिसमें उत्पादों की योजना बनाई जाती है, उनका निर्माण किया जाता है, उनका परीक्षण किया जाता है और उनमें तब तक सुधार किया जाता है जब तक कि वे किसी इंजीनियरिंग समस्या का प्रभावी ढंग से समाधान नहीं कर देते। पुनरावृत्ति ईडीपी का वह भाग है जहां उत्पादों का प्रोटोटाइप बनाया जाता है, उनका परीक्षण किया जाता है, उन्हें परिष्कृत किया जाता है और तब तक उनका पुनः प्रोटोटाइप बनाया जाता है जब तक कि वे डिजाइन टीम द्वारा निर्धारित मानदंडों को पूरा नहीं कर लेते। पुनरावृत्ति का अर्थ है अपने उत्पाद डिजाइन में सुधार करना।
इस इकाई में, छात्र अपने फ्लोट के पहले डिजाइन को जीवंत करेंगे, डिजाइन के बारे में चर्चा करेंगे और इसमें सुधार करने के तरीकों पर चर्चा करेंगे। वे इसमें संशोधन करेंगे, परीक्षण करेंगे और पुनः सुधार करेंगे, इस चक्र को दोहराएंगे या दोहराएंगे, जब तक कि वे डिजाइन से संतुष्ट नहीं हो जाते और यह परियोजना की आवश्यकताओं को पूरा नहीं कर लेता।
इंजीनियरिंग डिज़ाइन प्रक्रिया
छात्र परेड फ्लोट का डिजाइन और निर्माण करने के लिए इंजीनियरिंग डिजाइन प्रक्रिया (ईडीपी) का उपयोग करेंगे। ई.डी.पी. चरणों की एक श्रृंखला है जिसका पालन इंजीनियर समस्याओं का समाधान निकालने के लिए करते हैं। अक्सर, समाधान में ऐसे उत्पाद का डिजाइन करना शामिल होता है जो निश्चित मानदंडों को पूरा करता हो या किसी निश्चित कार्य को पूरा करता हो।
ईडीपी को निम्नलिखित चरणों में विभाजित किया जा सकता है: परिभाषित करें → समाधान विकसित करें → अनुकूलन करें।
- इंजीनियरिंग समस्याओं को परिभाषित करने में सफलता के मानदंडों और बाधाओं या सीमाओं के संदर्भ में समस्या को यथासंभव स्पष्ट रूप से बताना शामिल है
- इंजीनियरिंग समस्याओं के लिए समाधान डिजाइन करना विभिन्न संभावित समाधानों को उत्पन्न करने से शुरू होता है, फिर संभावित समाधानों का मूल्यांकन करके यह देखा जाता है कि कौन से समाधान समस्या के मानदंडों और बाधाओं को सबसे अच्छी तरह से पूरा करते हैं।
- डिजाइन समाधान को अनुकूलित करने में एक प्रक्रिया शामिल होती है जिसमें समाधानों का व्यवस्थित रूप से परीक्षण और परिशोधन किया जाता है और अंतिम डिजाइन को कम महत्वपूर्ण विशेषताओं के स्थान पर अधिक महत्वपूर्ण विशेषताओं को शामिल करके बेहतर बनाया जाता है।
ई.डी.पी. चक्रीय या का होता है। यह किसी उत्पाद या प्रक्रिया को बनाने, परीक्षण करने, विश्लेषण करने और परिष्कृत करने की प्रक्रिया है। परीक्षण के परिणामों के आधार पर, नए संस्करण बनाए जाते हैं, और उनमें तब तक संशोधन किया जाता रहता है जब तक कि डिजाइन टीम परिणामों से संतुष्ट न हो जाए।
इस इकाई में, छात्र ई.डी.पी. का उपयोग करके रोबोटिक परेड फ्लोट का सपना देखेंगे, योजना बनाएंगे और उसका निर्माण करेंगे। प्रारंभिक निर्माण के बाद, समूह डिजाइन मानदंडों और बाधाओं को पूरा करने के लिए अपने फ्लोट डिजाइन का परीक्षण और सुधार करेंगे।
स्यूडोकोड क्या है?
स्यूडोकोड कोडिंग के लिए एक संक्षिप्त संकेतन है जो कोड के मौखिक और लिखित विवरणों को जोड़ता है।
अक्सर, छात्र समाधान खोजने के लिए "अनुमान लगा सकते हैं और जांच" कर सकते हैं। हालाँकि, इससे उन्हें कोडिंग अवधारणाओं की वैचारिक समझ विकसित करने में मदद नहीं मिलती। स्यूडोकोड लिखने से छात्रों को कोडिंग की सतही समझ से आगे बढ़कर अधिक वैचारिक समझ विकसित करने में मदद मिलती है। स्यूडोकोड के लिए आवश्यक है कि विद्यार्थी कोडिंग शुरू करने से पहले अपने कोडिंग समाधान के बारे में संकल्पनात्मक रूप से सोचें। शिक्षकों को छात्रों से छद्मकोड पर चर्चा करते हुए निम्नलिखित प्रश्न पूछने चाहिए:
- वे अपनी परियोजना से क्या हासिल करना चाहते हैं?
- आप परियोजना के उद्देश्य या लक्ष्य को संक्षिप्त विशिष्ट कथनों में कैसे विभाजित करेंगे?
इस उदाहरण में, यदि विद्यार्थियों से रोबोट को आगे बढ़ने, दीवार का पता लगाने, दाईं ओर मुड़ने और फिर से आगे बढ़ने के लिए छद्म कोड बनाने को कहा जाए, तो यह निम्नलिखित होगा:
- रोबोट को तब तक आगे की ओर ले जाएं जब तक वह दीवार से 50 मिमी दूर न हो जाए
- रोबोट को रोकें
- रोबोट को 90 डिग्री घुमाएँ
- रोबोट को रोकें
- 600 मिमी आगे ड्राइव करें
एक बार छद्म कोड तैयार हो जाने के बाद, छात्र रोबोट को निर्देश देने के लिए कोड तैयार करेंगे कि उनके छद्म कोड के प्रत्येक चरण को सफलतापूर्वक कैसे पूरा किया जाए।
सड़न
विघटन में जटिल समस्या को ऐसे व्यवहारों में तोड़ना शामिल है जो अधिक प्रबंधनीय और समझने में आसान हों। समस्या को छोटे-छोटे भागों में विभाजित करने का अर्थ है कि प्रत्येक भाग की अधिक विस्तार से जांच की जा सकती है तथा उसे अधिक आसानी से हल किया जा सकता है। उदाहरण के लिए, यदि कोई छात्र चाहता है कि उसका रोबोट एक वर्ग में घूमे, तो उसे इसे छोटे-छोटे आदेशों में तोड़ना होगा। छात्रों के लिए विखंडन प्रक्रिया को परिष्कृत करना अभ्यास के लिए महत्वपूर्ण है, क्योंकि हो सकता है कि वे पहले आदेशों को छोटे घटकों में नहीं तोड़ पाएं:
| वर्गाकार विखंडन में आगे बढ़ें 1 | वर्गाकार विखंडन में आगे बढ़ें 2 | वर्गाकार विखंडन में आगे बढ़ें 3 |
|---|---|---|
|
|
|
अनुक्रमण
अनुक्रमण वह विशिष्ट क्रम है जिसमें किसी एल्गोरिथ्म या निर्देशों के सेट में व्यवहार निष्पादित किए जाते हैं। एक क्रिया या घटना अनुक्रम में अगली क्रमबद्ध क्रिया की ओर ले जाती है। अनुक्रमण महत्वपूर्ण है ताकि छात्र अपने रोबोट को सही ढंग से कोड कर सकें।
किसी रोबोट को सटीक रूप से यह बताने के लिए कि उसे कैसे चलना है, विघटन और अनुक्रमण दोनों की आवश्यकता होती है। सबसे पहले, समस्या, जैसे कि भूलभुलैया में कैसे आगे बढ़ा जाए, को छोटे-छोटे चरणों और व्यवहारों में विभाजित किया जाएगा। फिर, एक बार जब इन व्यवहारों की पहचान हो जाती है, तो उन्हें सही क्रम में व्यवस्थित करने की आवश्यकता होती है। यह महत्वपूर्ण है, क्योंकि रोबोट केवल उसी प्रकार चलेगा जैसा उसे कोडित किया गया है।
छात्र परेड भूलभुलैया से गुजरने के लिए अपने परेड फ्लोट को कोड करेंगे। उन्हें अपने प्रोजेक्ट में आदेशों को इस प्रकार क्रमबद्ध करना होगा कि उनका फ्लोट परेड भूलभुलैया में आगे, पीछे, बाएं और दाएं सही क्रम में चले।
VEXcode GO क्या है?
VEXcode GO एक कोडिंग वातावरण है जिसका उपयोग VEX GO रोबोट के साथ संचार करने के लिए किया जाता है। छात्र VEXcode GO प्रोजेक्ट बनाने के लिए ड्रैग और ड्रॉप इंटरफ़ेस का उपयोग करते हैं जो उनके रोबोट की गतिविधियों को नियंत्रित करते हैं। प्रत्येक ब्लॉक के उद्देश्य को दृश्य संकेतों जैसे कि उसके , रंग और लेबलउपयोग करके पहचाना जा सकता है।
इस इकाई में निम्नलिखित VEXcode GO ब्लॉक का उपयोग किया जाएगा:
[ड्राइव फॉर] - ड्राइवट्रेन को एक निश्चित दूरी के लिए आगे या पीछे ले जाता है। ड्राइवट्रेन किस दिशा में चलेगा, इसका चयन करें तथा अंडाकार में मान दर्ज करके यह निर्धारित करें कि वह कितनी दूर तक चलेगा।

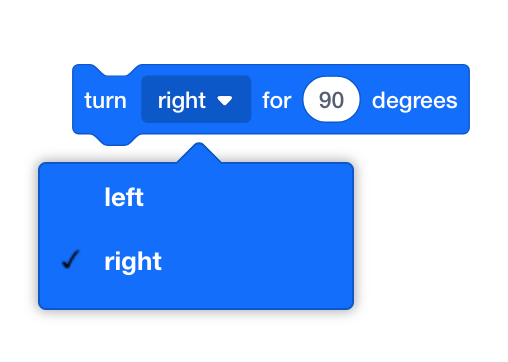
[के लिए घुमाएँ] - ड्राइवट्रेन को एक निश्चित संख्या में डिग्री के लिए बाएँ या दाएँ घुमाता है। ड्राइवट्रेन किस दिशा में घूमेगा, इसका चयन करें, तथा अंडाकार में डिग्री की संख्या दर्ज करके यह निर्धारित करें कि वह कितनी दूर तक घूमेगा।
[प्रतीक्षा] - अगले ब्लॉक पर जाने से पहले एक विशिष्ट समय तक प्रतीक्षा करता है।

[टिप्पणी] - प्रोग्रामर्स को अपने प्रोजेक्ट का वर्णन करने में मदद करने के लिए जानकारी लिखने की अनुमति देता है। टिप्पणियाँ परियोजना या उसके आसपास के ब्लॉकों को नहीं बदलतीं।

[स्पिन फॉर] - मोटर को एक निश्चित दिशा में एक निश्चित दूरी तक घुमाएगा, जहां से वह वर्तमान में स्थित है।

- डिफ़ॉल्ट रूप से, अन्य ब्लॉक तब तक प्रतीक्षा करेंगे जब तक मोटर चलना समाप्त नहीं कर देती। आप "और प्रतीक्षा न करें" का विस्तार करने के लिए तीर का चयन कर सकते हैं - इससे मोटर या मोटर समूह के चलते समय अन्य ब्लॉक चलते रहेंगे।

अपनी कक्षा में VEXcode GO का उपयोग शुरू करने के लिए, शिक्षक के डिवाइस पर VEX क्लासरूम ऐप डाउनलोड करें, फिर GO Brain फर्मवेयर को अपडेट करने, GO Brains का नाम बदलने और उनका पता लगाने, और अपनी कक्षा में GO Brains की बैटरियों की निगरानी करने के तरीके जानने के लिए VEX क्लासरूम ऐप का उपयोग करना लेख में दिए गए चरणों का पालन करें। VEXcode GO के बारे में अधिक जानकारी के लिए, VEX रोबोटिक्स VEX लाइब्रेरी के VEXcode GO अनुभाग पर जाएँ।