
พื้นหลัง
นักออกแบบ วิศวกร และนักวิทยาศาสตร์คอมพิวเตอร์สร้างโซลูชันที่สามารถแก้ไขปัญหาได้ทุกวัน ในหน่วยการเรียนรู้ขบวนแห่นี้ นักเรียนจะได้ใช้กระบวนการออกแบบทางวิศวกรรมเพื่อแก้ไขปัญหาจริง นักเรียนจะสำรวจวิธีการออกแบบ สร้าง และเขียนโค้ดรถแห่หุ่นยนต์อัตโนมัติเพื่อนำทางผ่านเขาวงกตที่เลียนแบบสิ่งกีดขวางในโลกแห่งความเป็นจริงของเส้นทางขบวนแห่
รถแห่ขบวนพาเหรดคืออะไร?
A ขบวนพาเหรด คือกลุ่มคนกลุ่มใหญ่หรือกลุ่มเล็กที่เดินร่วมกันและมักแต่งกายด้วยเครื่องแต่งกายตามด้วยวงโยธวาทิตและขบวนแห่. ขบวนแห่ คือ แท่นตกแต่งที่อาจสร้างบนยานพาหนะ หรืออาจลากไปด้านหลังยานพาหนะก็ได้ ขบวนแห่มักจัดขึ้นในวันหยุดหรือเพื่อเป็นเกียรติแก่ใครบางคน และมักจะเป็นการเฉลิมฉลองบางประเภท

การวนซ้ำ
การวนซ้ำ ถูกกำหนดให้เป็นการกระทำหรือกระบวนการของการทำซ้ำ สำหรับวัตถุประสงค์ของเรา การวนซ้ำคือวงจรการออกแบบแบบเป็นระบบและเป็นวงจรซึ่งมีการวางแผน สร้าง ทดสอบ และปรับปรุงผลิตภัณฑ์จนกระทั่งสามารถแก้ปัญหาทางวิศวกรรมได้อย่างมีประสิทธิภาพ การวนซ้ำเป็นส่วนหนึ่งของ EDP ที่จะสร้างต้นแบบผลิตภัณฑ์ ทดสอบ ปรับแต่ง และสร้างต้นแบบอีกครั้งจนกว่าจะตรงตามเกณฑ์ที่ทีมออกแบบกำหนดไว้ การทำซ้ำคือการปรับปรุงการออกแบบผลิตภัณฑ์ของคุณ
ในหน่วยนี้ นักเรียนจะนำการออกแบบทุ่นลอยครั้งแรกมาใช้ในชีวิตจริง และมีส่วนร่วมในการอภิปรายเกี่ยวกับการออกแบบและวิธีปรับปรุง พวกเขาจะทำการปรับเปลี่ยน ทดสอบ และปรับปรุงอีกครั้ง โดยทำซ้ำรอบนี้หรือวนซ้ำหลายๆ ครั้ง จนกระทั่งพวกเขาพอใจกับการออกแบบและตรงตามข้อกำหนดของโครงการ
กระบวนการออกแบบทางวิศวกรรม
นักศึกษาจะใช้กระบวนการออกแบบทางวิศวกรรม (EDP) เพื่อออกแบบและสร้างรถแห่ขบวนพาเหรด EDP เป็นชุดขั้นตอนที่วิศวกรปฏิบัติตามเพื่อหาแนวทางแก้ไขปัญหา บ่อยครั้งที่โซลูชันเกี่ยวข้องกับการออกแบบผลิตภัณฑ์ที่ตรงตามเกณฑ์บางประการหรือบรรลุงานบางอย่าง
EDP สามารถแบ่งย่อยออกเป็นขั้นตอนต่างๆ ดังต่อไปนี้: กำหนด → พัฒนาโซลูชัน → เพิ่มประสิทธิภาพ
- การกำหนดปัญหาทางวิศวกรรม เกี่ยวข้องกับการระบุปัญหาที่ต้องแก้ไขอย่างชัดเจนที่สุดเท่าที่จะเป็นไปได้ในแง่ของเกณฑ์ความสำเร็จ และข้อจำกัดหรือขอบเขต
- การออกแบบโซลูชันสำหรับปัญหาทางวิศวกรรม เริ่มต้นด้วยการสร้างโซลูชันที่เป็นไปได้หลายแบบ จากนั้นจึงประเมินโซลูชันที่เป็นไปได้เพื่อดูว่าโซลูชันใดตอบสนองเกณฑ์และข้อจำกัดของปัญหาได้ดีที่สุด
- การเพิ่มประสิทธิภาพโซลูชันการออกแบบ เกี่ยวข้องกับกระบวนการที่โซลูชันจะได้รับการทดสอบและปรับแต่งอย่างเป็นระบบ และการออกแบบขั้นสุดท้ายจะได้รับการปรับปรุงโดยแลกคุณสมบัติที่สำคัญน้อยกว่าด้วยคุณสมบัติที่สำคัญกว่า
EDP มีลักษณะเป็นวงจรหรือ วนซ้ำ เป็นกระบวนการสร้าง ทดสอบ วิเคราะห์ และปรับแต่งผลิตภัณฑ์หรือกระบวนการ ตามผลการทดสอบ จะมีการสร้างการวนซ้ำแบบใหม่ และปรับเปลี่ยนต่อไปจนกว่าทีมออกแบบจะพึงพอใจกับผลลัพธ์
ในหน่วยนี้ นักเรียนจะใช้ EDP ในการฝัน วางแผน และสร้างขบวนพาเหรดหุ่นยนต์ หลังจากการสร้างเบื้องต้น กลุ่มต่างๆ จะทำการทดสอบและปรับปรุงการออกแบบทุ่นเพื่อให้ตรงตามเกณฑ์และข้อจำกัดด้านการออกแบบ
Pseudocode คืออะไร?
Pseudocode คือสัญลักษณ์การเขียนย่อสำหรับการเข้ารหัส ซึ่งรวมคำอธิบายของโค้ดทั้งในรูปแบบวาจาและลายลักษณ์อักษร
บ่อยครั้งที่นักเรียนสามารถ "เดาและตรวจสอบ" หาทางแก้ปัญหา อย่างไรก็ตาม สิ่งนี้ไม่ได้ทำให้พวกเขามีความเข้าใจในเชิงแนวคิดของการเข้ารหัส การเขียน pseudocode ช่วยให้นักเรียนเข้าใจการเขียนโค้ดจากระดับผิวเผินไปสู่ความเข้าใจในเชิงแนวคิดมากขึ้น Pseudocode ต้องการให้ผู้เรียนคิดเชิงแนวคิดเกี่ยวกับวิธีเขียนโค้ดก่อนที่จะเริ่มต้นเขียนโค้ด ครูควรหารือเรื่อง pseudocode กับนักเรียนโดยถามนักเรียนดังนี้:
- พวกเขาต้องการให้โครงการของพวกเขาบรรลุผลอะไร?
- คุณจะแบ่งความตั้งใจหรือเป้าหมายของโครงการออกเป็นข้อความสั้น ๆ ที่เฉพาะเจาะจงได้อย่างไร
ในตัวอย่างนี้ หากขอให้เด็กนักเรียนสร้างซูโดโค้ดเพื่อให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า ตรวจจับกำแพง เลี้ยวขวา จากนั้นจึงเคลื่อนที่ไปข้างหน้าอีกครั้ง จะเป็นดังต่อไปนี้:
- ขับเคลื่อนหุ่นยนต์ไปข้างหน้าจนกระทั่งห่างจากผนัง 50 มม.
- หยุดหุ่นยนต์
- หมุนหุ่นยนต์ 90 องศา
- หยุดหุ่นยนต์
- ขับเคลื่อนไปข้างหน้า 600 มม.
เมื่อสร้างซูโดโค้ดแล้ว นักเรียนจะต้องสร้างโค้ดเพื่อสั่งหุ่นยนต์ว่าจะต้องทำอย่างไรจึงจะเสร็จสมบูรณ์ในแต่ละขั้นตอนของซูโดโค้ด
การย่อยสลาย
การแยกส่วน เกี่ยวข้องกับการแบ่งปัญหาที่ซับซ้อนออกเป็นพฤติกรรมต่างๆ ที่สามารถจัดการได้และเข้าใจได้ง่ายขึ้น การแบ่งปัญหาออกเป็นส่วนย่อยๆ จะทำให้สามารถตรวจสอบแต่ละส่วนได้อย่างละเอียดมากขึ้นและแก้ไขได้ง่ายขึ้น ตัวอย่างเช่น หากนักเรียนต้องการให้หุ่นยนต์ของตนเคลื่อนที่เป็นสี่เหลี่ยม พวกเขาจะต้องแบ่งหุ่นยนต์ออกเป็นคำสั่งที่เล็กลง การปรับปรุงกระบวนการแยกย่อยเป็นสิ่งสำคัญสำหรับการฝึกฝนเพื่อให้ผู้เรียนได้ฝึกฝน เนื่องจากในตอนแรกพวกเขาอาจไม่ได้แยกคำสั่งออกเป็นส่วนประกอบที่เล็กลง:
| เคลื่อนที่ในลักษณะแยกเป็นสี่เหลี่ยมจัตุรัส 1 | เคลื่อนที่ในการแบ่งช่องสี่เหลี่ยม 2 | เคลื่อนที่ในการแบ่งช่อง 3 |
|---|---|---|
|
|
|
การเรียงลำดับ
การเรียงลำดับ เป็นลำดับเฉพาะในการดำเนินการพฤติกรรมในอัลกอริทึมหรือชุดคำสั่ง การกระทำหรือเหตุการณ์นำไปสู่การดำเนินการลำดับถัดไปในลำดับ การเรียงลำดับเป็นสิ่งสำคัญเพื่อให้นักเรียนสามารถเขียนโค้ดหุ่นยนต์ของตนได้อย่างถูกต้อง
เพื่อบอกหุ่นยนต์ว่าต้องเคลื่อนไหวอย่างไรอย่างแม่นยำ จำเป็นต้องมีทั้งการแยกส่วนและการจัดลำดับ ประการแรก ปัญหา เช่น วิธีการเดินผ่านเขาวงกต จะถูกแยกย่อยออกเป็นส่วนย่อยและพฤติกรรมต่างๆ จากนั้น เมื่อระบุพฤติกรรมเหล่านี้ได้แล้ว จะต้องจัดพฤติกรรมเหล่านั้นให้เป็นลำดับที่ถูกต้อง สิ่งนี้สำคัญเนื่องจากหุ่นยนต์จะเคลื่อนไหวได้ตรงตามโค้ดเท่านั้น
นักเรียนจะต้องเขียนโค้ดรถแห่เพื่อเคลื่อนผ่านเขาวงกตของรถแห่ พวกเขาจะต้องเรียงลำดับคำสั่งในโปรเจ็กต์ของตนเพื่อให้ขบวนเคลื่อนไปข้างหน้า ข้างหลัง ซ้ายและขวาในลำดับที่ถูกต้องเพื่อนำทางในเขาวงกตของขบวนพาเหรด
VEXcode GO คืออะไร?
VEXcode GO เป็นสภาพแวดล้อมการเขียนโค้ดที่ใช้ในการสื่อสารกับหุ่นยนต์ VEX GO นักศึกษาใช้อินเทอร์เฟซแบบลากและวางเพื่อสร้างโครงการ VEXcode GO เพื่อควบคุมการกระทำของหุ่นยนต์ แต่ละบล็อค วัตถุประสงค์สามารถระบุได้โดยใช้ตัวชี้นำภาพเช่น รูปร่าง, สี และฉลาก.
บล็อก VEXcode GO ต่อไปนี้จะถูกใช้ในหน่วยนี้:
[ขับต่อ] - จะเคลื่อนระบบส่งกำลังไปข้างหน้าหรือถอยหลังในระยะทางที่กำหนด เลือกทิศทางที่ระบบส่งกำลังจะเคลื่อนที่ และตั้งค่าว่าจะเคลื่อนที่ได้ไกลแค่ไหนโดยป้อนค่าในวงรี

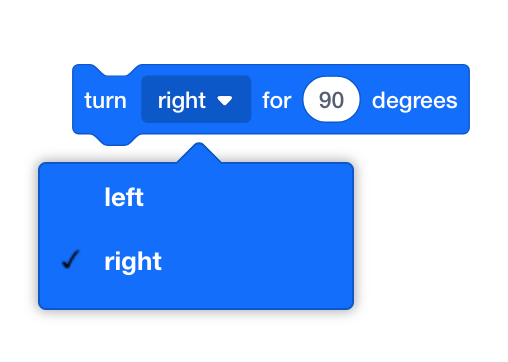
[หมุนเพื่อ] - หมุนระบบส่งกำลังไปทางซ้ายหรือขวาเป็นจำนวนองศาที่กำหนด เลือกทิศทางที่ระบบส่งกำลังจะหมุน และตั้งค่าว่าจะเคลื่อนที่ไปไกลแค่ไหนโดยป้อนจำนวนองศาในวงรี
[รอ] - รอเวลาที่กำหนดก่อนที่จะย้ายไปยังบล็อคถัดไป

[ความคิดเห็น] - ช่วยให้โปรแกรมเมอร์สามารถเขียนข้อมูลเพื่อช่วยอธิบายโครงการของพวกเขาได้ ความคิดเห็นจะไม่เปลี่ยนแปลงโครงการหรือบล็อคที่อยู่รอบๆ

[หมุนเพื่อ] - จะหมุนมอเตอร์ตามทิศทางที่กำหนดในระยะทางที่กำหนดจากตำแหน่งปัจจุบัน

- โดยค่าเริ่มต้น บล็อคอื่น ๆ จะรอจนกว่ามอเตอร์จะเคลื่อนที่เสร็จ คุณสามารถเลือกลูกศรเพื่อขยาย "และไม่รอ" ได้ - การกระทำนี้จะทำให้บล็อคอื่น ๆ ยังคงทำงานต่อไปขณะที่มอเตอร์หรือกลุ่มมอเตอร์เคลื่อนที่

ในการเริ่มต้นใช้ VEXcode GO ในห้องเรียนของคุณ ให้ดาวน์โหลดแอป VEX Classroom ลงในอุปกรณ์ของครู แล้วทำตามขั้นตอนใน การใช้แอปห้องเรียน VEX บทความเพื่อเรียนรู้วิธีอัปเดต GO เฟิร์มแวร์สมอง เปลี่ยนชื่อและค้นหา GO Brains และตรวจสอบแบตเตอรี่ของ GO Brains ในห้องเรียนของคุณ สำหรับ ข้อมูลเพิ่มเติมเกี่ยวกับ VEXcode GO เยี่ยมชม ส่วน VEXcode GOของ VEX Robotics VEX Library.