
Pelajaran 2: Menggunakan Sensor Mata Depan dengan Loop While
Dalam Pelajaran ini, Anda akan membuat proyek menggunakan Front Eye Sensor dengan loop while dan kondisinot untuk menavigasi Robot VR melalui Disk Maze Playground. Proyek Anda akan menginstruksikan Robot VR untuk berbelok ke kanan saat cakram hijau terdeteksi oleh Sensor Mata Depan, dan ke kiri saat cakram biru terdeteksi. Dalam tantangan mini, Anda akan menerapkan keterampilan ini untuk mengarahkan Robot VR ke setiap cakram di Disk Maze Playground , dan menyelesaikannya di cakram merah.

Hasil belajar
- Identifikasi bahwa loop sementara dapat digunakan dengan Sensor Mata.
- Identifikasi bahwa untuk menggunakan data Sensor Mata untuk membuat Robot VR mengambil keputusan dalam suatu proyek, suatu kondisi harus digunakan.
- Jelaskan bagaimana mengidentifikasi pola dalam suatu proyek dapat digunakan untuk menyederhanakan kode Anda.
Menavigasi ke Empat Disk Pertama
Sensor Mata Depan dapat digunakan untuk membuat Robot VR mendeteksi cakram dan warnanya, dan membuat keputusan berdasarkan data tersebut. Robot VR kemudian dapat menavigasi Disk Maze menggunakan umpan balik sensor yang terkait dengan warna objek yang terdeteksi, untuk menentukan pergerakan robot. Pada dasarnya, data Sensor Mata Depan akan digunakan untuk memberi 'kode warna' pada putaran Robot VR, sehingga saat satu warna terdeteksi, ia akan berbelok ke kiri, dan saat warna lain terdeteksi, ia akan berbelok ke kanan.
Untuk memulai, mari kita lihat jalur yang akan dilalui Robot VR untuk menavigasi bagian pertama dari Disk Maze. 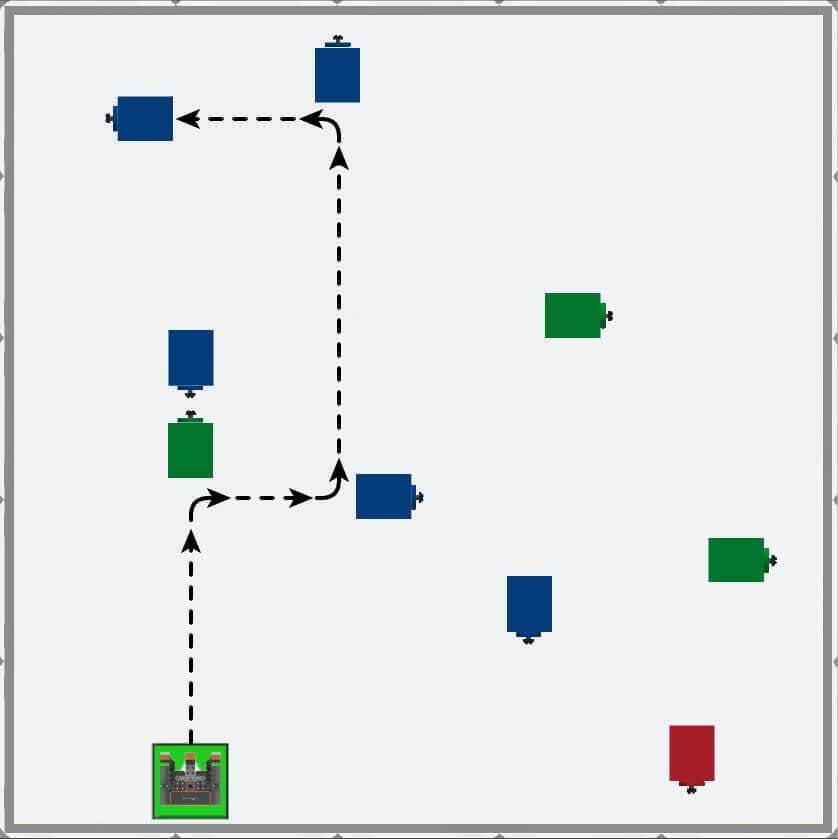
Untuk Informasi Anda
Disk Maze Playgroundberisi tanda warna pada lantai Playground di setiap lokasi cakram berwarna timbul.
Kami akan menggunakan Front Eye Sensor untuk mendeteksi cakram dalam Unit ini, tetapi logika dan proyek yang sama dapat digunakan dengan Down Eye Sensor juga. Alih-alih mendeteksi cakram yang terangkat, Sensor Mata Bawah akan mendeteksi warna di lantai Taman Bermain, dan membuat keputusan berdasarkan data tersebut. Sensor Mata Bawah tidak mendeteksi lantai Taman Bermain sebagai objek, tetapi akan mendeteksi ruang berwarna.
Menggunakan LoopWhiledengan Data Sensor Mata
Pada Unit sebelumnya, perulanganwhiledigunakan untuk membuat Robot VR melaju saat suatu kondisi terpenuhi, atau perulangan while dengan kondisibukanuntuk melaju saat suatu kondisi tidak terpenuhi. Data dari Sensor Mata dapat digunakan dengan cara yang sama. Mari kita lihat langkah pertama di jalur Disk Maze.

Robot VR harus melaju maju sementaraSensor Mata Depan tidak mendeteksi hijau. Ketika Sensor Mata Depan mendeteksi warna hijau, Robot VR harus berbelok ke kanan 90 derajat untuk menghadap cakram berikutnya di labirin.
Beri Nama dan Simpan Proyek
Mari mulai membangun proyek untuk menggunakan loop sementarauntuk menginstruksikan Robot VR untuk berputar ketika Sensor Mata Depan mendeteksi Disk berwarna (hijau) pertama di Disk Maze Playground.
- Mulai proyek baru dan pilihDisk Maze Playgroundsaat diminta.
-
Beri nama proyek

- Untuk memulai, tambahkan komentar untuk menjelaskan perilaku Robot VR. Proyek ini akan menggunakan komentar untuk mengingatkan pengguna tentang tujuan perilaku Robot VR pada bagian proyek berikutnya. Ingat bahwa komentar dalam VEXcode VR Python dimulai dengan simbol # (pound).
def main():
# Berkendara ke disk pertama (hijau), belok kanan- Robot VR perlu melaju menuju cakram pertama di Disk Maze Playground. Tarik atau ketik loop whiledengan kondisi not di ruang kerja. Ingatlah untuk menyertakan perintahwaitsebagai bagian dari loopwhile, untuk memastikan bahwa Robot VR mengeksekusi proyek dengan benar.
def main():
# Berkendara ke disk pertama (hijau), belok kanan
sementara tidak kondisi:
tunggu(5, MSEC)- Atur kondisi loop ke perintahdetectdari Front Eye Sensor, dan atur parameter ke "HIJAU."
def main():
# Berkendara ke disk pertama (hijau), belok kanan
saat tidak ada front_eye.detect(GREEN):
tunggu(5, MSEC)- Di dalam loop while , seret atau ketik perintah drive yang tidak menunggu sehingga proyek Anda tampak seperti ini:
def main():
# Berkendara ke disk pertama (hijau), belok kanan
saat tidak front_eye.detect(GREEN):
drivetrain.drive(MAJU)
tunggu(5, MSEC)- Di luar loop while , seret atau ketik perintah turn_foruntuk menginstruksikan Robot VR agar berbelok ke kanan 90 derajat saat mendeteksi cakram hijau. Proyek Anda akan terlihat seperti ini:
def main():
# Berkendara ke cakram pertama (hijau), belok kanan
saat tidak front_eye.detect(GREEN):
drivetrain.drive(MAJU)
tunggu(5, MSEC)
drivetrain.turn_for(KANAN, 90, DERAJAT)- Buka Jendela Taman Bermainjika belum terbuka. PastikanDisk Maze Playground terbuka, dan jalankan proyek.
-
Saksikan Robot VR melaju ke arah cakram hijau pertama, lalu belok kanan.
- Perhatikan bahwa Robot VR melaju ke depan sementara kondisi warna Sensor Mata Depan melaporkan Salah. Setelah cakram hijau terdeteksi, Sensor Mata Depan melaporkan warna Benar dan keluar dari putaran. Kemudian, ia mengeksekusi perintah berikutnya, yaitu berbelok ke kanan sejauh 90 derajat.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.