
บทเรียนที่ 2: การใช้เซนเซอร์ตรวจจับดวงตาด้านหน้ากับขณะลูป
ในบทเรียนนี้ คุณจะสร้างโปรเจ็กต์โดยใช้เซ็นเซอร์ตาหน้าโดยมีลูป while และเงื่อนไข not เพื่อนำทางหุ่นยนต์ VR ผ่าน Disk Maze Playground โครงการของคุณจะสั่งให้หุ่นยนต์ VR เลี้ยวขวาเมื่อตรวจพบดิสก์สีเขียวโดยเซ็นเซอร์ดวงตาด้านหน้าและเลี้ยวซ้ายเมื่อตรวจพบดิสก์สีน้ำเงิน ในการท้าทายขนาดเล็กคุณจะใช้ทักษะเหล่านี้เพื่อขับหุ่นยนต์ VR ไปยังแต่ละดิสก์ใน Disk Maze Playground และจบที่ดิสก์สีแดง

ผลการเรียนรู้
- ระบุว่าลูป ในขณะที่ สามารถใช้งานได้กับเซ็นเซอร์ตา
- ระบุว่าในการใช้ข้อมูลเซ็นเซอร์ตาเพื่อทำการตัดสินใจในโครงการจะต้องใช้เงื่อนไข
- อธิบายวิธีระบุรูปแบบในโปรเจกต์เพื่อทำให้รหัสของคุณง่ายขึ้น
การนำทางไปยังดิสก์สี่ตัวแรก
เซ็นเซอร์ตรวจจับดวงตาด้านหน้าสามารถใช้เพื่อตรวจจับดิสก์และสีของ VR Robot และตัดสินใจตามข้อมูลนั้น จากนั้นหุ่นยนต์ VR สามารถนำทาง Disk Maze โดยใช้การป้อนกลับ ของเซ็นเซอร์ที่เกี่ยวข้องกับสีของวัตถุที่ตรวจพบเพื่อกำหนดการเคลื่อนไหวของหุ่นยนต์ โดยพื้นฐานแล้วข้อมูลเซ็นเซอร์ตาหน้าจะถูกใช้เพื่อ 'รหัสสี' การเลี้ยวของหุ่นยนต์ VR ดังนั้นเมื่อตรวจพบสีหนึ่งมันจะเลี้ยวซ้ายและเมื่อตรวจพบอีกสีหนึ่งมันจะเลี้ยวขวา
ในการเริ่มต้นเรามาดูเส้นทางที่หุ่นยนต์ VR จะเดินทางไปยังส่วนแรกของเขาวงกตดิสก์ 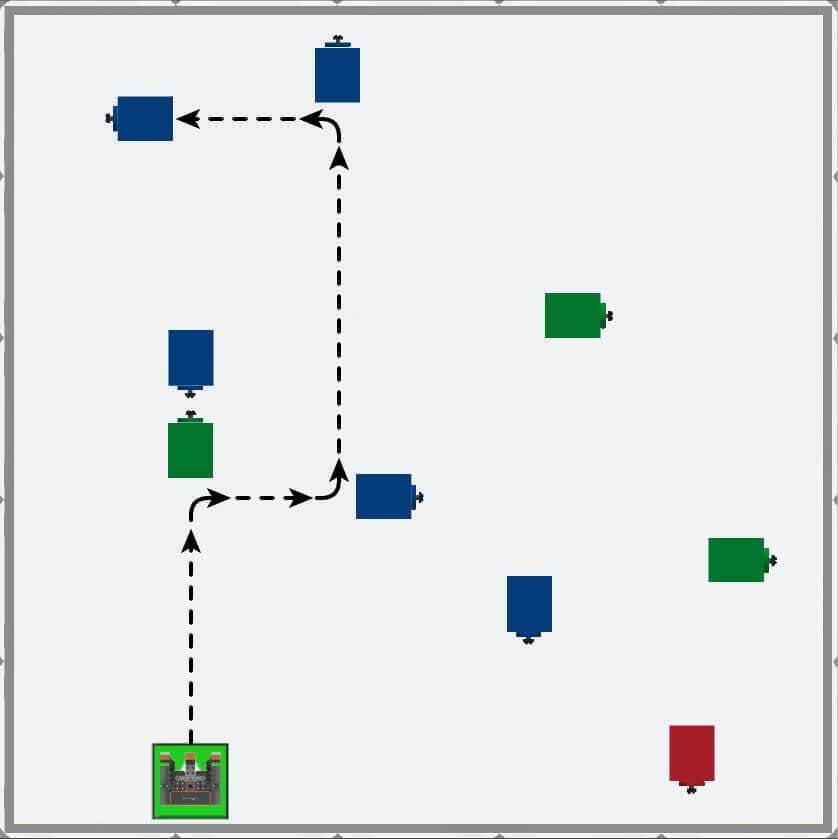
สำหรับข้อมูลของคุณ
Disk Maze Playground มีเครื่องหมายสีบนพื้นของสนามเด็กเล่นในแต่ละตำแหน่งของดิสก์สีที่ยกขึ้น
เราจะใช้เซ็นเซอร์ดวงตาด้านหน้าเพื่อตรวจจับดิสก์ในหน่วยนี้แต่สามารถใช้ตรรกะและโครงการเดียวกันกับเซ็นเซอร์ดวงตาลงได้เช่นกัน แทนที่จะตรวจจับดิสก์ที่ยกขึ้นเซ็นเซอร์ดาวน์อายจะตรวจจับสีบนพื้นของสนามเด็กเล่นและตัดสินใจด้วยข้อมูลนั้น เซ็นเซอร์ตรวจจับดวงตาลงไม่ได้ตรวจจับพื้นสนามเด็กเล่นเป็นวัตถุแต่จะตรวจจับช่องว่างที่มีสี
ใช้การ ลูปขณะ ที่มีข้อมูลเซ็นเซอร์ตา
ในหน่วยก่อนหน้าลูปขณะ ที่ ถูกใช้ เพื่อทำให้ VR Robot ขับเคลื่อนในขณะที่ตรงตามเงื่อนไข หรือลูปขณะ ที่ ไม่มี เงื่อนไขในการขับเคลื่อนในขณะที่ไม่ตรงตามเงื่อนไข ข้อมูลจากเซ็นเซอร์ตาสามารถใช้ในลักษณะเดียวกันได้ เรามาดูขั้นตอนแรกในเส้นทางเขาวงกตดิสก์กัน

หุ่นยนต์ VR ควรขับเคลื่อนไปข้างหน้า ในขณะ ที่เซ็นเซอร์ตรวจจับดวงตาด้านหน้า ไม่ ตรวจจับ สีเขียว เมื่อเซ็นเซอร์ตรวจจับดวงตาด้านหน้าตรวจจับสีเขียวหุ่นยนต์ VR ควรเลี้ยวขวา 90 องศาเพื่อหันหน้าไปทางดิสก์ถัดไปในเขาวงกต
ตั้งชื่อและบันทึกโครงการ
มาเริ่มสร้างโปรเจ็กต์ โดยใช้คำสั่ง while loop เพื่อสั่งให้ VR Robot หมุนเมื่อ Front Eye Sensor ตรวจพบดิสก์สีแรก (สีเขียว) บน Disk Maze Playground
- เริ่มโปรเจกต์ใหม่และเลือก Disk Maze Playground เมื่อได้รับแจ้ง

-
ตั้งชื่อ โครงการ Unit7Lesson2

- ในการเริ่มต้นให้เพิ่มความคิดเห็นเพื่ออธิบายพฤติกรรมของหุ่นยนต์ VR โครงการ นี้จะใช้ความคิดเห็นเพื่อเตือนผู้ใช้ว่าเจตนาสำหรับพฤติกรรมของหุ่นยนต์ VR คืออะไรในส่วนต่อไปนี้ของโครงการ โปรดจำไว้ว่าความคิดเห็นใน VEXcode VR Python เริ่มต้นด้วยสัญลักษณ์ # (ปอนด์)
def main ():
# Drive to 1st disk (green), turn right- หุ่นยนต์ VR จะต้องขับไปยังดิสก์แรกบน Disk MazePlayground ลากหรือพิมพ์ลูปขณะ ที่ ไม่มี เงื่อนไขในพื้นที่ทำงาน อย่าลืมรวมคำสั่ง wait ไว้เป็นส่วนหนึ่งของลูป while เพื่อให้แน่ใจว่าหุ่นยนต์ VR ดำเนินการโครงการได้อย่างถูกต้อง
def main ():
# Drive to 1st disk (green), turn right
while not condition:
wait (5, MSEC)- ตั้งค่าเงื่อนไขของลูปให้เป็นคำสั่ง ตรวจจับ ของเซ็นเซอร์ตาด้านหน้า และตั้งค่าพารามิเตอร์เป็น "สีเขียว"
def main ():
# Drive to 1st disk (green), turn right
while not front_eye.detect (GREEN):
wait (5, MSEC)- ภายในลูป while ให้ลากหรือพิมพ์คำสั่ง drive แบบไม่รอ เพื่อให้โปรเจ็กต์ของคุณมีลักษณะดังนี้:
def main ():
# Drive to 1st disk (green), turn right
while not front_eye.detect (GREEN): drivetrain.drive
(FORWARD)
wait (5, MSEC)- นอกวงจร while ให้ลากหรือพิมพ์คำสั่ง turn_for เพื่อสั่งให้ VR Robot เลี้ยวขวา 90 องศาเมื่อตรวจพบดิสก์สีเขียว โปรเจกต์ของคุณควรมีลักษณะดังนี้:
def main ():
# Drive to 1st disk (green), turn right
while not front_eye.detect (GREEN): drivetrain.drive (
forward)
wait (5, msec) drivetrain.turn_for
(RIGHT, 90, DEGREES)- เปิดหน้าต่างสนามเด็กเล่น หากยังไม่ได้เปิด ตรวจสอบให้แน่ใจว่า Disk Maze Playground เปิดอยู่และรันโครงการ
-
ดูหุ่นยนต์ VR ขับไปข้างหน้าไปยังดิสก์สีเขียวอันแรกแล้วเลี้ยวขวา
- สังเกตว่าหุ่นยนต์ VR ขับเคลื่อนไปข้างหน้าในขณะที่สภาพของสีเซ็น เซอร์ตาหน้ารายงานเท็จ เมื่อตรวจพบดิสก์สีเขียวสีเซ็นเซอร์ตรวจจับดวงตาด้านหน้าจะรายงาน TRUE และออก จากลูป จากนั้นจะดำเนินการคำสั่งถัดไปซึ่งก็คือเลี้ยวขวา 90 องศา
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป