
Lição 2: Usando o Sensor do Olho Frontal com Loops While
Nesta lição, irá criar um projeto utilizando o Front Eye Sensor com um ciclo while e not condição para navegar o robô VR pelo Disk Maze Playground. Seu projeto instruirá o Robô VR a virar à direita quando um disco verde for detectado pelo Sensor de Olho Frontal e à esquerda quando um disco azul for detectado. No mini desafio, você aplicará essas habilidades para conduzir o Robô de RV a cada disco no Playground do Labirinto de Discos e terminar no disco vermelho.

Resultados de Aprendizagem
- Identifique que o loop enquanto pode ser utilizado com os sensores oculares.
- Identifique que, para usar os dados do sensor ocular para fazer com que o robô de RV tome uma decisão em um projeto, uma condição deve ser usada.
- Descreva como a identificação de um padrão em um projeto pode ser usada para simplificar o seu código.
Navegação para os quatro primeiros discos
O Sensor de Olho Frontal pode ser usado para fazer com que o Robô VR detecte discos e suas cores e tome decisões com base nesses dados. O Robô VR pode então navegar no Labirinto de Disco usando o feedback do sensor relacionado às cores dos objetos que são detectados, para determinar o movimento do robô. Essencialmente, os dados do Sensor do Olho Frontal serão usados para "codificar as cores" das voltas do Robô VR, portanto, quando uma cor é detectada, ela vira à esquerda e, quando outra é detectada, vira à direita.
Para começar, vamos ver o caminho que o Robô de RV percorrerá para navegar na primeira parte do Labirinto de Discos. 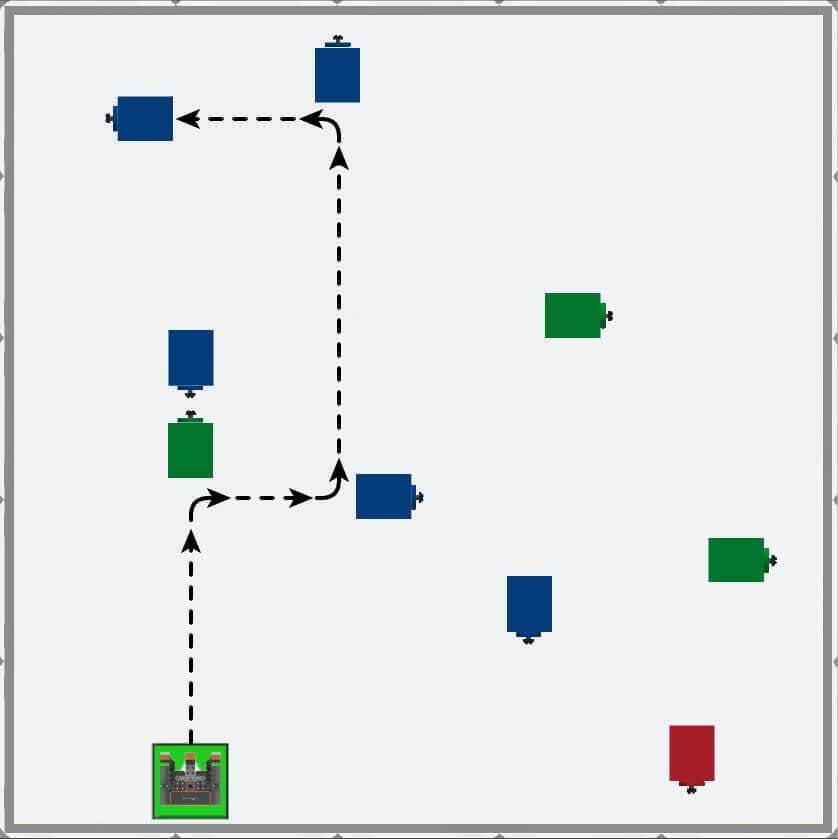
Para sua informação
O Playground do Labirinto de Discos contém marcas coloridas no chão do Playground em cada um dos locais de discos coloridos elevados.
Usaremos o Sensor de Olho Frontal para detectar os discos nesta Unidade, mas a mesma lógica e projeto também podem ser usados com o Sensor de Olho Descendente. Em vez de detectar os discos levantados, o Down Eye Sensor detectaria as cores no chão do Playground e tomaria decisões com esses dados. O Down Eye Sensor não detecta o chão do Playground como um objeto, mas detectará os espaços coloridos.
Utilizando um loop While com dados do sensor ocular
Nas unidades anteriores, o ciclo while foi utilizado para fazer o robô VR conduzir enquanto uma condição foi satisfeita, ou um ciclo while com uma condição e não para conduzir enquanto uma condição não foi satisfeita. Os dados dos sensores oculares podem ser usados da mesma maneira. Vejamos a primeira etapa no caminho do Labirinto de Discos.

O Robô VR deve avançar enquanto o Sensor do Olho Frontal não detecta o verde. Quando o Sensor de Olho Frontal detecta verde, o Robô VR deve virar à direita 90 graus para enfrentar o próximo disco no labirinto.
Nomeie e guarde o projeto
Vamos começar a construir o projeto para utilizar o enquanto loop para instruir o robô VR a rodar quando o Front Eye Sensor detetar o primeiro disco colorido (verde) no Disk Maze Playground.
- Inicie um novo projeto e selecione o Disk Maze Playground quando solicitado.

-
Nomeie o projeto como Unit7Lesson2.

- Para começar, adicione um comentário para descrever o comportamento do Robô de RV. Este projeto utilizará comentários para lembrar ao utilizador qual é a intenção para os comportamentos do Robô VR durante a secção seguinte do projeto. Lembre-se de que os comentários no VEXcode VR Python começam com um símbolo # (pound).
def main():
# Unidade para o 1º disco (verde), vire à direita- O robô VR precisará dirigir-se para o primeiro disco no Disk Maze Playground. Arraste ou digite um ciclo while com uma condição e não no espaço de trabalho. Lembre-se de incluir o comando wait como parte do ciclo while , para garantir que o VR Robot executa o projeto corretamente.
def main():
# Drive to 1st disk (green), turn right
while not condition:
wait(5, MSEC)- Defina a condição do loop para o comando detect do Front Eye Sensor e defina o parâmetro para "GREEN".
def main():
# Drive to 1st disk (green), turn right
while not front_eye.detect(GREEN):
wait(5, MSEC)- Dentro do ciclo while , arraste ou digite o comando sem espera drive para que o seu projeto fique assim:
def main():
# Drive to 1st disk (green), turn right
while not front_eye.detect(GREEN):
drivetrain.drive(FORWARD)
wait(5, MSEC)- Fora do ciclo while , arraste ou digite um comando turn_for para instruir o robô VR a virar 90 graus para a direita quando detetar um disco verde. O seu projeto deve ter este aspeto:
def main():
# Drive to 1st disk (green), turn right
while not front_eye.detect(GREEN):
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)- Abra a janela do playground se ainda não estiver aberta. Certifique-se de que o Disk Maze Playground abre e execute o projeto.
-
Observe o robô VR avançar para o primeiro disco verde e, em seguida, vire à direita.
- Observe que o Robô VR avança enquanto a condição da cor do Sensor de Olho Frontal relata Falso. Uma vez que o disco verde é detectado, a cor do Sensor de Olho Frontal informa Verdadeiro e sai do loop. Em seguida, ele executa o próximo comando, que é virar à direita por 90 graus.
Selecione o botão Seguinte para continuar com o resto desta lição.