
പാഠം 2: വൈൽ ലൂപ്പുകളിൽ ഫ്രണ്ട് ഐ സെൻസർ ഉപയോഗിക്കൽ
ഈ പാഠത്തിൽ, ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട്ലൂപ്പിലൂടെ VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യുന്നതിന് while ലൂപ്പുംഅല്ല കണ്ടീഷനും ഉള്ള ഫ്രണ്ട് ഐ സെൻസർ ഉപയോഗിച്ച് നിങ്ങൾ ഒരു പ്രോജക്റ്റ് സൃഷ്ടിക്കും. ഫ്രണ്ട് ഐ സെൻസർ ഒരു പച്ച ഡിസ്ക് കണ്ടെത്തുമ്പോൾ വലത്തേക്ക് തിരിയാനും, ഒരു നീല ഡിസ്ക് കണ്ടെത്തുമ്പോൾ ഇടത്തേക്ക് തിരിയാനും നിങ്ങളുടെ പ്രോജക്റ്റ് VR റോബോട്ടിനോട് നിർദ്ദേശിക്കും. മിനി ചലഞ്ചിൽ, ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട്, ലെ ഓരോ ഡിസ്കിലേക്കും VR റോബോട്ടിനെ ഓടിക്കാൻ നിങ്ങൾ ഈ കഴിവുകൾ പ്രയോഗിക്കുകയും ചുവന്ന ഡിസ്കിൽ പൂർത്തിയാക്കുകയും ചെയ്യും.

പഠന ഫലങ്ങൾ
- ഐ സെൻസറുകളിൽ ലൂപ്പും ലൂപ്പും ഉപയോഗിക്കാൻ കഴിയുമെന്ന് തിരിച്ചറിയുക.
- ഒരു പ്രോജക്റ്റിൽ തീരുമാനമെടുക്കാൻ VR റോബോട്ടിനെ പ്രേരിപ്പിക്കുന്നതിന് ഐ സെൻസർ ഡാറ്റ ഉപയോഗിക്കുന്നതിന്, ഒരു വ്യവസ്ഥ ഉപയോഗിക്കേണ്ടതുണ്ടെന്ന് തിരിച്ചറിയുക.
- ഒരു പ്രോജക്റ്റിലെ ഒരു പാറ്റേൺ തിരിച്ചറിയുന്നത് നിങ്ങളുടെ കോഡ് ലളിതമാക്കാൻ എങ്ങനെ ഉപയോഗിക്കാമെന്ന് വിവരിക്കുക.
ആദ്യത്തെ നാല് ഡിസ്കുകളിലേക്ക് നാവിഗേറ്റ് ചെയ്യുന്നു
ഫ്രണ്ട് ഐ സെൻസർ ഉപയോഗിച്ച് VR റോബോട്ടിന് ഡിസ്കുകളും അവയുടെ നിറങ്ങളും കണ്ടെത്താനും ആ ഡാറ്റയെ അടിസ്ഥാനമാക്കി തീരുമാനങ്ങൾ എടുക്കാനും കഴിയും. കണ്ടെത്തിയ വസ്തുക്കളുടെ നിറങ്ങളുമായി ബന്ധപ്പെട്ട സെൻസർ ഫീഡ്ബാക്ക് ഉപയോഗിച്ച് വിആർ റോബോട്ടിന് ഡിസ്ക് മേസിൽ നാവിഗേറ്റ് ചെയ്യാൻ കഴിയും, റോബോട്ടിന്റെ ചലനം നിർണ്ണയിക്കാൻ. അടിസ്ഥാനപരമായി, ഫ്രണ്ട് ഐ സെൻസർ ഡാറ്റ VR റോബോട്ടിന്റെ തിരിവുകൾക്ക് 'കളർ കോഡ്' നൽകാൻ ഉപയോഗിക്കും, അങ്ങനെ ഒരു നിറം കണ്ടെത്തുമ്പോൾ അത് ഇടത്തേക്ക് തിരിയുന്നു, മറ്റൊന്ന് കണ്ടെത്തുമ്പോൾ അത് വലത്തേക്ക് തിരിയുന്നു.
ആരംഭിക്കുന്നതിന്, ഡിസ്ക് മേസിന്റെ ആദ്യ ഭാഗം നാവിഗേറ്റ് ചെയ്യാൻ VR റോബോട്ട് സഞ്ചരിക്കുന്ന പാത നോക്കാം. 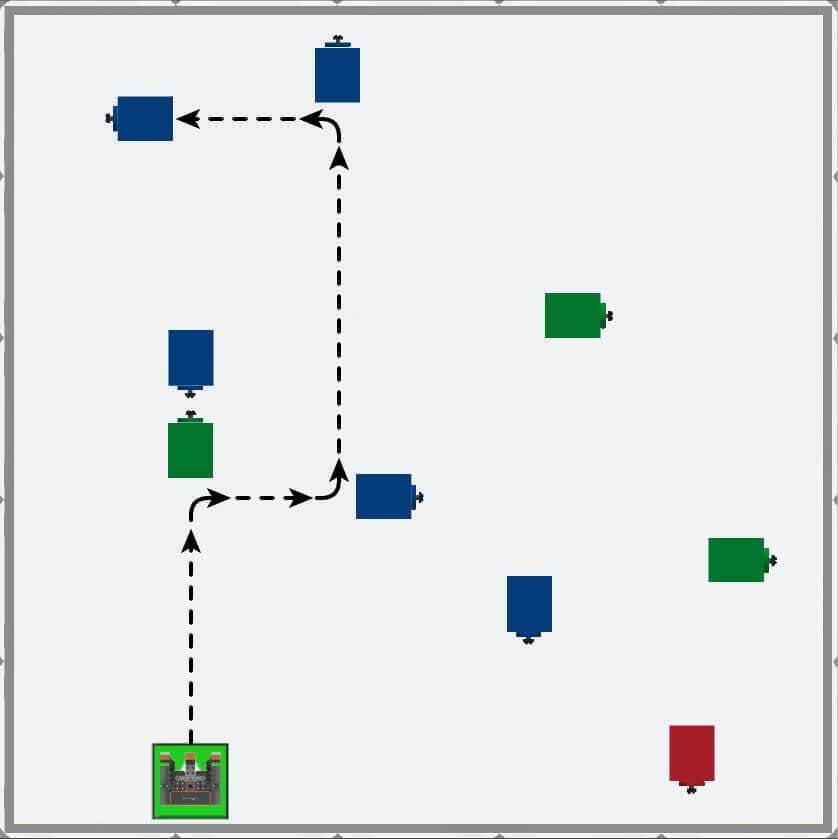
നിങ്ങളുടെ അറിവിലേക്കായി
ഡിസ്ക് മെയ്സ് പ്ലേഗ്രൗണ്ട്പ്ലേഗ്രൗണ്ടിന്റെ തറയിൽ ഉയർത്തിയിരിക്കുന്ന നിറമുള്ള ഡിസ്ക് ലൊക്കേഷനുകളിൽ ഓരോന്നിലും നിറമുള്ള അടയാളങ്ങൾ അടങ്ങിയിരിക്കുന്നു.
ഈ യൂണിറ്റിലെ ഡിസ്കുകൾ കണ്ടെത്തുന്നതിന് നമ്മൾ ഫ്രണ്ട് ഐ സെൻസർ ഉപയോഗിക്കും, എന്നാൽ അതേ ലോജിക്കും പ്രോജക്റ്റും ഡൗൺ ഐ സെൻസറിലും ഉപയോഗിക്കാം. ഉയർത്തിയ ഡിസ്കുകൾ കണ്ടെത്തുന്നതിനുപകരം, ഡൗൺ ഐ സെൻസർ കളിസ്ഥലത്തിന്റെ തറയിലെ നിറങ്ങൾ കണ്ടെത്തി ആ ഡാറ്റ ഉപയോഗിച്ച് തീരുമാനങ്ങൾ എടുക്കും. ഡൗൺ ഐ സെൻസർ പ്ലേഗ്രൗണ്ടിന്റെ തറയെ ഒരു വസ്തുവായി കണ്ടെത്തുന്നില്ല, പക്ഷേ അത് നിറമുള്ള ഇടങ്ങൾ കണ്ടെത്തും.
ഐ സെൻസർ ഡാറ്റയുള്ളവൈൽലൂപ്പ് ഉപയോഗിക്കുന്നു
മുൻ യൂണിറ്റുകളിൽ, ഒരു നിബന്ധന പാലിക്കുമ്പോൾ VR റോബോട്ട് ഡ്രൈവ് ചെയ്യാൻwhileലൂപ്പ് ഉപയോഗിച്ചിരുന്നു, അല്ലെങ്കിൽ ഒരു നിബന്ധന പാലിക്കാത്തപ്പോൾ ഡ്രൈവ് ചെയ്യാൻഅല്ലകണ്ടീഷനുള്ള while ലൂപ്പ് ഉപയോഗിച്ചിരുന്നു. ഐ സെൻസറുകളിൽ നിന്നുള്ള ഡാറ്റയും ഇതേ രീതിയിൽ ഉപയോഗിക്കാം. ഡിസ്ക് മേസ് പാതയിലെ ആദ്യ ഘട്ടം നോക്കാം.

VR റോബോട്ട് മുന്നോട്ട് ഓടിക്കണം,ഫ്രണ്ട് ഐ സെൻസർ പച്ച നിറം കണ്ടെത്തുന്നില്ല. ഫ്രണ്ട് ഐ സെൻസർ പച്ച നിറം കണ്ടെത്തുമ്പോൾ, മസിലിലെ അടുത്ത ഡിസ്കിനെ അഭിമുഖീകരിക്കാൻ VR റോബോട്ട് 90 ഡിഗ്രി വലത്തേക്ക് തിരിയണം.
പ്രോജക്റ്റിന് പേര് നൽകി സംരക്ഷിക്കുക
ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട്ലെ ആദ്യത്തെ (പച്ച) നിറമുള്ള ഡിസ്ക് ഫ്രണ്ട് ഐ സെൻസർ കണ്ടെത്തുമ്പോൾ VR റോബോട്ടിനോട് തിരിയാൻ നിർദ്ദേശിക്കുന്നതിന് whileലൂപ്പ് ഉപയോഗിക്കുന്നതിനുള്ള പ്രോജക്റ്റ് നിർമ്മിക്കാൻ നമുക്ക് ആരംഭിക്കാം.
- ഒരു പുതിയ പ്രോജക്റ്റ് ആരംഭിച്ച് ആവശ്യപ്പെടുമ്പോൾഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട്തിരഞ്ഞെടുക്കുക.
-
പ്രോജക്റ്റിന് പേര് നൽകുക യൂണിറ്റ്7പാഠം2.

- ആരംഭിക്കുന്നതിന്, VR റോബോട്ടിന്റെ പെരുമാറ്റം വിവരിക്കുന്ന ഒരു അഭിപ്രായം ചേർക്കുക. പ്രോജക്റ്റിന്റെ തുടർന്നുള്ള വിഭാഗത്തിൽ VR റോബോട്ടിന്റെ പെരുമാറ്റരീതികളുടെ ഉദ്ദേശ്യം എന്താണെന്ന് ഉപയോക്താവിനെ ഓർമ്മിപ്പിക്കാൻ ഈ പ്രോജക്റ്റ് അഭിപ്രായങ്ങൾ ഉപയോഗിക്കും. VEXcode VR പൈത്തണിലെ കമന്റുകൾ # (പൗണ്ട്) ചിഹ്നത്തിലാണ് ആരംഭിക്കുന്നതെന്ന് ഓർമ്മിക്കുക.
def main():
# ആദ്യ ഡിസ്കിലേക്ക് (പച്ച) ഡ്രൈവ് ചെയ്യുക, വലത്തേക്ക് തിരിയുക- ഡിസ്ക് മേസ് പ്ലേഗ്രൗണ്ട്ലെ ആദ്യത്തെ ഡിസ്കിലേക്ക് VR റോബോട്ട് ഡ്രൈവ് ചെയ്യേണ്ടതുണ്ട്. വർക്ക്സ്പെയ്സിൽ ഒരു ഒരുഡ്രാഗ് ഇൻ ചെയ്യുകയോ ടൈപ്പ് ചെയ്യുകയോ ചെയ്യുക. VR റോബോട്ട് പ്രോജക്റ്റ് ശരിയായി നടപ്പിലാക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ,whileലൂപ്പിന്റെ ഭാഗമായിwaitകമാൻഡ് ഉൾപ്പെടുത്താൻ ഓർമ്മിക്കുക.
def main():
# ആദ്യ ഡിസ്കിലേക്ക് (പച്ച) ഡ്രൈവ് ചെയ്യുക, വലത്തേക്ക്
തിരിയുക, അവസ്ഥയല്ല:
wait(5, MSEC)- ലൂപ്പിന്റെ അവസ്ഥ ഫ്രണ്ട് ഐ സെൻസറിന്റെഡിറ്റക്റ്റ്കമാൻഡിലേക്ക് സജ്ജമാക്കുക, തുടർന്ന് പാരാമീറ്റർ "GREEN" ആയി സജ്ജമാക്കുക.
def main():
# ആദ്യത്തെ ഡിസ്കിലേക്ക് (പച്ച) ഡ്രൈവ് ചെയ്യുക, വലത്തേക്ക്
തിരിയുക, front_eye.detect(GREEN) അല്ല:
wait(5, MSEC)- while ലൂപ്പിനുള്ളിൽ, നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ കാണപ്പെടുന്നതിന് നോൺ-വെയിറ്റിംഗ് ഡ്രൈവ് കമാൻഡ് വലിച്ചിടുക അല്ലെങ്കിൽ ടൈപ്പ് ചെയ്യുക:
def main():
# ആദ്യത്തെ ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യുക (പച്ച), വലത്തേക്ക്
തിരിയുക, front_eye.detect(GREEN) അല്ല:
drivetrain.drive(FORWARD)
wait(5, MSEC)- while ലൂപ്പിന് പുറത്ത്, ഒരു പച്ച ഡിസ്ക് കണ്ടെത്തുമ്പോൾ VR റോബോട്ടിനോട് 90 ഡിഗ്രി വലത്തേക്ക് തിരിയാൻ നിർദ്ദേശിക്കാൻ turn_forകമാൻഡ് ഡ്രാഗ് ചെയ്യുകയോ ടൈപ്പ് ചെയ്യുകയോ ചെയ്യുക. നിങ്ങളുടെ പ്രോജക്റ്റ് ഇതുപോലെ ആയിരിക്കണം:
def main():
# ആദ്യത്തെ ഡിസ്കിലേക്ക് ഡ്രൈവ് ചെയ്യുക (പച്ച), വലത്തേക്ക്
തിരിയുക, front_eye.detect(GREEN) അല്ലെങ്കിലും:
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)- പ്ലേഗ്രൗണ്ട് വിൻഡോതുറന്നിട്ടില്ലെങ്കിൽ അത് തുറക്കുക. ഡിസ്ക് മെയ്സ് പ്ലേഗ്രൗണ്ട് തുറക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക, കൂടാതെ പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
ആദ്യത്തെ പച്ച ഡിസ്കിലേക്ക് VR റോബോട്ട് മുന്നോട്ട് പോകുന്നത് കാണുക, തുടർന്ന് വലത്തേക്ക് തിരിയുക.
- ഫ്രണ്ട് ഐ സെൻസറിന്റെ അവസ്ഥ തെറ്റാണെന്ന് റിപ്പോർട്ട് ചെയ്യുമ്പോൾ VR റോബോട്ട് മുന്നോട്ട് നീങ്ങുന്നത് ശ്രദ്ധിക്കുക. പച്ച ഡിസ്ക് കണ്ടെത്തിക്കഴിഞ്ഞാൽ, ഫ്രണ്ട് ഐ സെൻസർ നിറം ട്രൂ എന്ന് റിപ്പോർട്ട് ചെയ്യുകയും ലൂപ്പിൽ നിന്ന് പുറത്തുകടക്കുകയും ചെയ്യുന്നു. പിന്നെ, അത് അടുത്ത കമാൻഡ് എക്സിക്യൂട്ട് ചെയ്യുന്നു, അതായത് 90 ഡിഗ്രി വലത്തേക്ക് തിരിയുക.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.