
पाठ 2: व्हाइल लूप्स के साथ फ्रंट आई सेंसर का उपयोग करना
इस पाठ में, आप फ्रंट आई सेंसर का उपयोग करके जबकि लूप औरनहीं स्थिति के साथ एक प्रोजेक्ट बनाएंगे, जिससे वीआर रोबोट को डिस्क भूलभुलैया खेल के मैदानमाध्यम से नेविगेट किया जा सके। आपका प्रोजेक्ट वीआर रोबोट को निर्देश देगा कि जब फ्रंट आई सेंसर द्वारा हरे रंग की डिस्क का पता लगाया जाए तो वह दाईं ओर मुड़ जाए, तथा जब नीली डिस्क का पता लगाया जाए तो वह बाईं ओर मुड़ जाए। मिनी चुनौती में, आप इन कौशलों को लागू करके वीआर रोबोट को डिस्क भूलभुलैया खेल के मैदान में प्रत्येक डिस्क पर ले जाएंगे, और लाल डिस्क पर समाप्त करेंगे।

सीखने के परिणाम
- पहचानें कि while लूप का उपयोग नेत्र सेंसर के साथ किया जा सकता है।
- पहचानें कि किसी प्रोजेक्ट में वीआर रोबोट को निर्णय लेने के लिए आई सेंसर डेटा का उपयोग करने के लिए, एक शर्त का उपयोग किया जाना चाहिए।
- वर्णन करें कि किसी प्रोजेक्ट में पैटर्न की पहचान करके अपने कोड को सरल कैसे बनाया जा सकता है।
पहले चार डिस्क पर नेविगेट करना
फ्रंट आई सेंसर का उपयोग वीआर रोबोट को डिस्क और उनके रंगों का पता लगाने और उस डेटा के आधार पर निर्णय लेने में किया जा सकता है। इसके बाद वीआर रोबोट डिस्क भूलभुलैया में वस्तुओं के रंगों से संबंधित सेंसर फीडबैक का उपयोग करके रोबोट की गति का पता लगा सकता है। अनिवार्यतः, फ्रंट आई सेंसर डेटा का उपयोग वीआर रोबोट के घुमावों को 'कलर कोड' करने के लिए किया जाएगा, इसलिए जब एक रंग का पता चलता है तो यह बायीं ओर मुड़ता है, और जब दूसरा रंग पता चलता है तो यह दायीं ओर मुड़ता है।
सबसे पहले, आइए उस पथ पर नजर डालें जिस पर वीआर रोबोट डिस्क भूलभुलैया के पहले भाग को पार करने के लिए यात्रा करेगा। 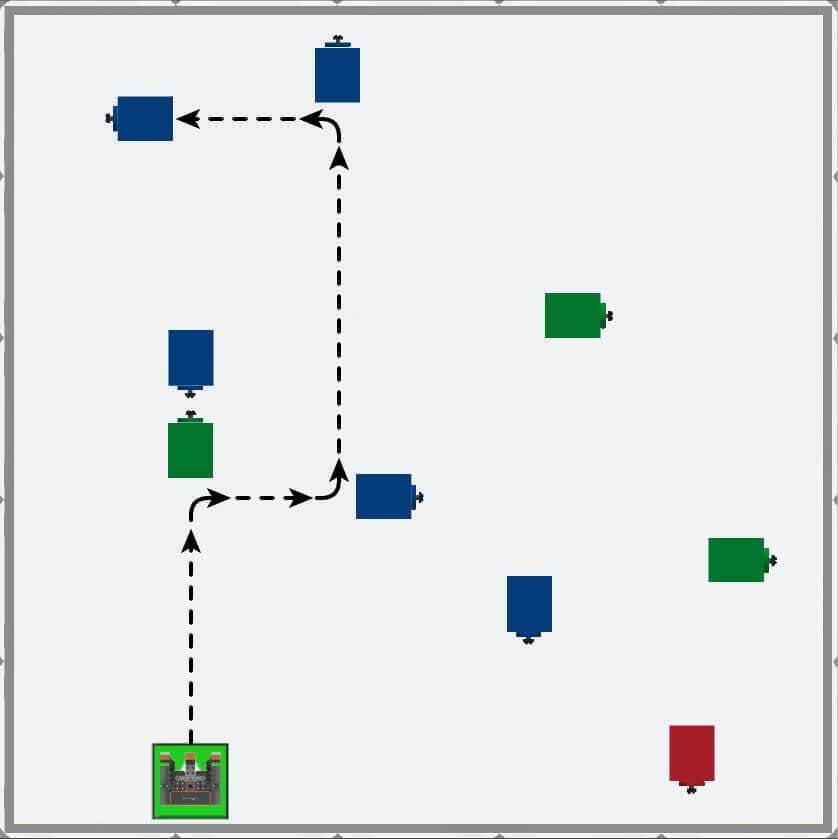
आपकी जानकारी के लिए
डिस्क भूलभुलैया खेल का मैदानखेल के मैदान के फर्श पर प्रत्येक उभरे हुए रंगीन डिस्क स्थान पर रंगीन चिह्न होते हैं।
हम इस यूनिट में डिस्क का पता लगाने के लिए फ्रंट आई सेंसर का उपयोग करेंगे, लेकिन इसी तर्क और प्रोजेक्ट का उपयोग डाउन आई सेंसर के साथ भी किया जा सकता है। उभरी हुई डिस्कों का पता लगाने के बजाय, डाउन आई सेंसर खेल के मैदान के फर्श पर रंगों का पता लगाएगा, और उस डेटा के आधार पर निर्णय लेगा। डाउन आई सेंसर खेल के मैदान के फर्श को वस्तु के रूप में नहीं पहचानता है, लेकिन यह रंगीन स्थानों का पता लगा लेता है।
नेत्र संवेदक डेटा के साथWhileलूप का उपयोग करना
पिछली इकाइयों में,whileलूप का उपयोग शर्त पूरी होने पर VR रोबोट को चलाने के लिए किया जाता था, या while लूप का उपयोग शर्त पूरी न होने पर चलाने के लिएन किके साथ किया जाता था। नेत्र सेंसर से प्राप्त डेटा का उपयोग उसी तरह किया जा सकता है। आइये डिस्क मेज़ पथ के पहले चरण पर नज़र डालें।

वीआर रोबोट को आगे बढ़ना चाहिए जबकिफ्रंट आई सेंसर हरे रंग का पता नहीं लगाता है। जब फ्रंट आई सेंसर हरे रंग का पता लगा लेता है, तो वीआर रोबोट को भूलभुलैया में अगली डिस्क का सामना करने के लिए 90 डिग्री पर दाईं ओर मुड़ना चाहिए।
प्रोजेक्ट को नाम दें और सहेजें
आइए, whileलूप का उपयोग करके प्रोजेक्ट का निर्माण शुरू करें, ताकि जब फ्रंट आई सेंसर डिस्क मेज़ प्लेग्राउंडपर पहली (हरे) रंग की डिस्क का पता लगाए, तो वीआर रोबोट को मुड़ने का निर्देश दिया जा सके।
- एक नया प्रोजेक्ट शुरू करें और संकेत मिलने परडिस्क मेज़ प्लेग्राउंडका चयन करें।
-
परियोजना का नाम बताइए इकाई 7 पाठ

- आरंभ करने के लिए, वीआर रोबोट के व्यवहार का वर्णन करने के लिए एक टिप्पणी जोड़ें। यह परियोजना टिप्पणियों का उपयोग करके उपयोगकर्ता को याद दिलाएगी कि परियोजना के अगले भाग के दौरान VR रोबोट के व्यवहार का उद्देश्य क्या है। याद रखें कि VEXcode VR पायथन में टिप्पणियाँ # (पाउंड) प्रतीक से शुरू होती हैं।
def main():
# पहली डिस्क (हरा) पर ड्राइव करें, दाएँ मुड़ें- वीआर रोबोट को डिस्क भूलभुलैया खेल के मैदानपर पहली डिस्क की ओर ड्राइव करने की आवश्यकता होगी। कार्यक्षेत्र में not शर्त के साथ whileलूप खींचें या टाइप करें। यह सुनिश्चित करने के लिए कि VR रोबोट प्रोजेक्ट को सही ढंग से निष्पादित करता है,whileलूप के भाग के रूप मेंwaitकमांड को शामिल करना याद रखें।
def main():
# पहली डिस्क (हरा) तक ड्राइव करें, दाएं मुड़ें
जब तक नहीं स्थिति:
wait(5, MSEC)- लूप की स्थिति को फ्रंट आई सेंसर केडिटेक्टकमांड पर सेट करें, और पैरामीटर को "ग्रीन" पर सेट करें।
def main():
# पहली डिस्क (हरा) पर ड्राइव करें, दाएं मुड़ें
जब तक front_eye.detect(GREEN):
wait(5, MSEC)- while लूप के अंदर, नॉन-वेटिंग ड्राइव कमांड को खींचें या टाइप करें ताकि आपका प्रोजेक्ट इस तरह दिखे:
def main():
# पहली डिस्क (हरा) तक ड्राइव करें, दाएं मुड़ें
जब तक front_eye.detect(GREEN):
drivetrain.drive(FORWARD)
wait(5, MSEC)- while लूप के बाहर, turn_forकमांड को खींचें या टाइप करें, ताकि VR रोबोट को हरे रंग की डिस्क का पता चलने पर 90 डिग्री दाईं ओर मुड़ने का निर्देश मिले। आपका प्रोजेक्ट इस तरह दिखना चाहिए:
def main():
# पहली डिस्क (हरा) तक ड्राइव करें, दाएं मुड़ें
जब तक front_eye.detect(GREEN):
drivetrain.drive(FORWARD)
wait(5, MSEC)
drivetrain.turn_for(RIGHT, 90, DEGREES)- यदि प्लेग्राउंड विंडोपहले से खुली नहीं है तो उसे खोलें। सुनिश्चित करें किडिस्क भूलभुलैया खेल का मैदान खुलता है, और परियोजना को चलाएं।
-
वी.आर. रोबोट को पहले हरे रंग की डिस्क तक आगे बढ़ते हुए देखें, फिर दाईं ओर मुड़ें।
- ध्यान दें कि वीआर रोबोट आगे बढ़ता है जबकि फ्रंट आई सेंसर रंग की स्थिति गलत बताती है। एक बार हरे रंग की डिस्क का पता चलने पर, फ्रंट आई सेंसर रंग सत्य की रिपोर्ट करता है और लूप से बाहर निकल जाता है। इसके बाद, यह अगला आदेश निष्पादित करता है, जो कि 90 डिग्री तक दाईं ओर मुड़ना है।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।