
練習する
最後の セクションでは、Drivetrain ブロックを使用して する方法と、Motion ブロックを使用して個々のモーターをコーディングする方法を学習しました。 さて、 だことを応用して シンプルなクローボットをコーディングし、「キューブのキャプチャ」アクティビティを完了します。
このアクティビティでは、Simple Clawbot は、 IQ キューブまで移動し、 キューブを収集し、 爪でキューブを移動し、 開始ゾーンに戻す必要があります。 以下のビデオを見て、これまでに学んだことを応用して「Capture the Cube」の練習アクティビティを完了する方法を確認してください。
次は、Capture the Cube の練習アクティビティを完了する番です。
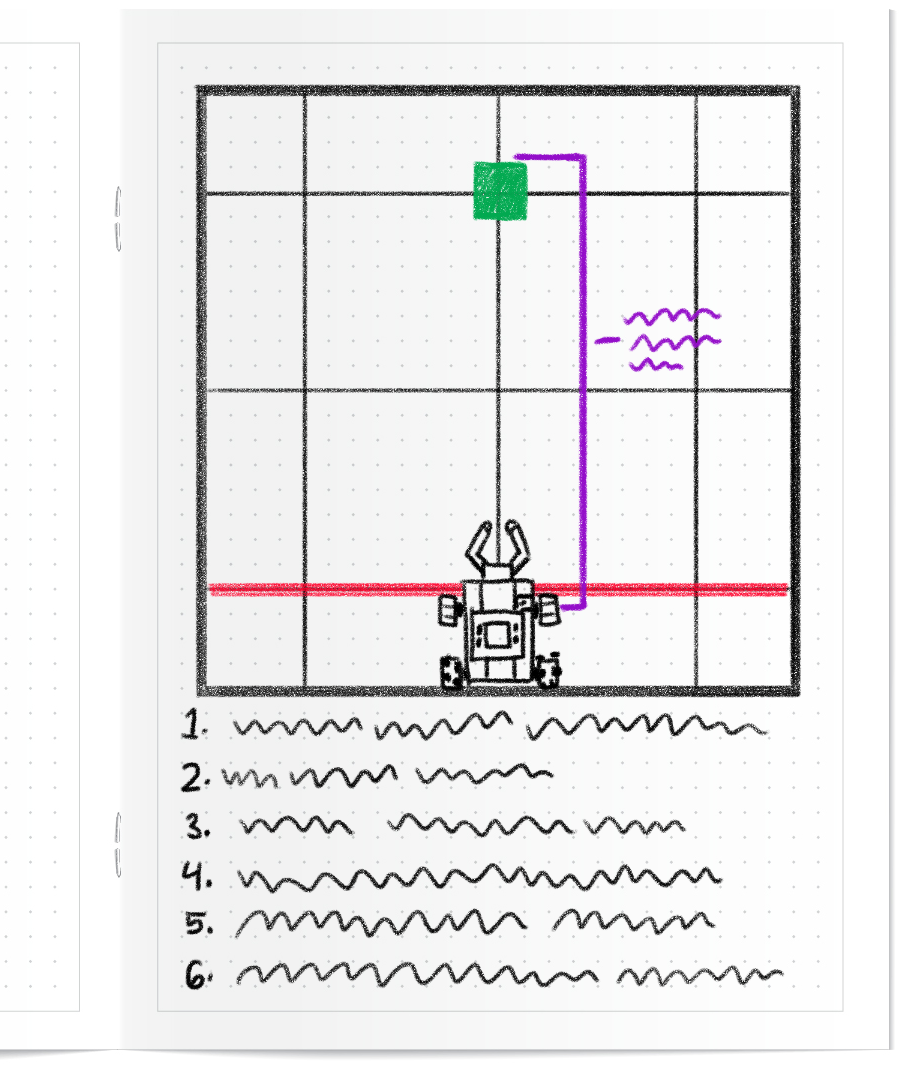
このアニメーションでは、ロボットが自律的にキューブまで移動し、爪でキューブを収集し、キューブを開始ゾーンの に戻します。 このアニメーションは、ロボットが「Capture the Cube 練習アクティビティを完了するためにたどる可能性のある 1 つのパスを示しています。
ビデオファイル
Capture the Cube の実践アクティビティを完了したら、結果をエンジニアリング ノートに文書化します。
- Simple Clawbot が を完了してキューブを収集し、開始ゾーンに戻すにはどのようなアクションが必要かを考えてください。
- これらのアクションを完了するためにロボットが走行および回転する必要がある距離を測定し、これをコードに含めることができます。
結果を記録する方法の例については、この画像を参照してください。
チャレンジの準備をする
Compete (次のページ) では、IQ キューブを つ収集し、開始ゾーンに届けるように Simple Clawbot をコーディングします。 チャレンジで競争する方法を学び、理解を確認してから、チャレンジに向けて練習します。