
![]() 教師ツールボックス
-
アクティビティ概要
教師ツールボックス
-
アクティビティ概要
この探索では、前進、後進、待機の基本的なプログラミング動作を学生に紹介します。 これらの基本的なスキルは、次のアクティビティや、この STEM ラボの最後にあるストライク チャレンジ (スピードボットを使用してボウリングで競う) で成功するのに役立ちます。
V5 Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを使用すると、学生は 1 つの命令だけで Speedbot が前進するようにプログラムできます。
スピードボットは移動準備完了です!
この調査により、Speedbot を単純な動きにプログラムするためのツールが提供されます。 このアクティビティの最後には、前進、後退、待機の動作を使用してバスケットボール ドリル チャレンジに取り組みます。
![]() 教師ツールボックス
教師ツールボックス
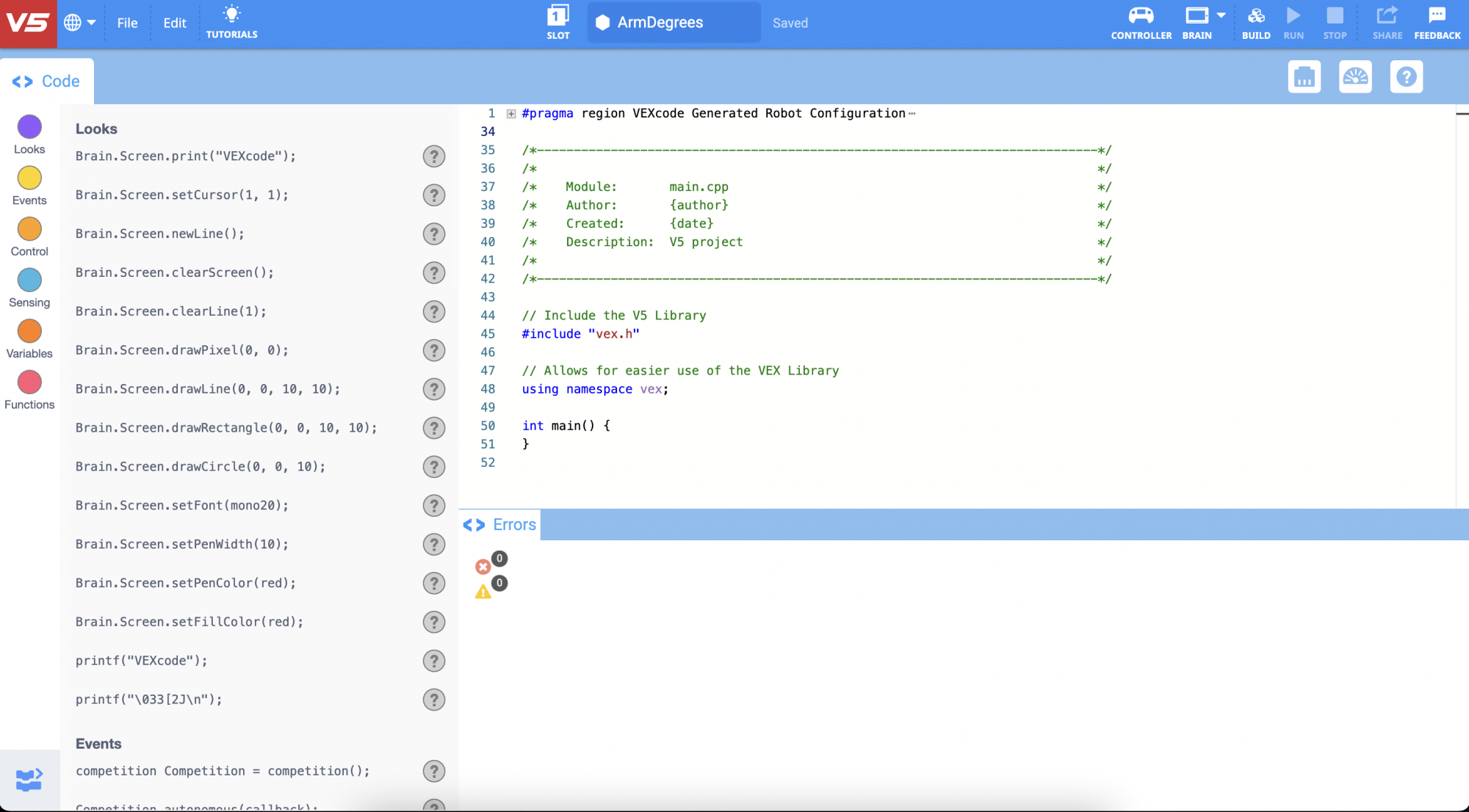
VEXcode V5 のユーザー インターフェイスの概要を以下に示します。 学生は、Momentum Alley STEM Lab のアクティビティ中にこれらのタブ/ボタンについて学習します。 これらのタブ/ボタンに関する詳細情報を提供するリンクも STEM ラボ全体に提供されています。
-
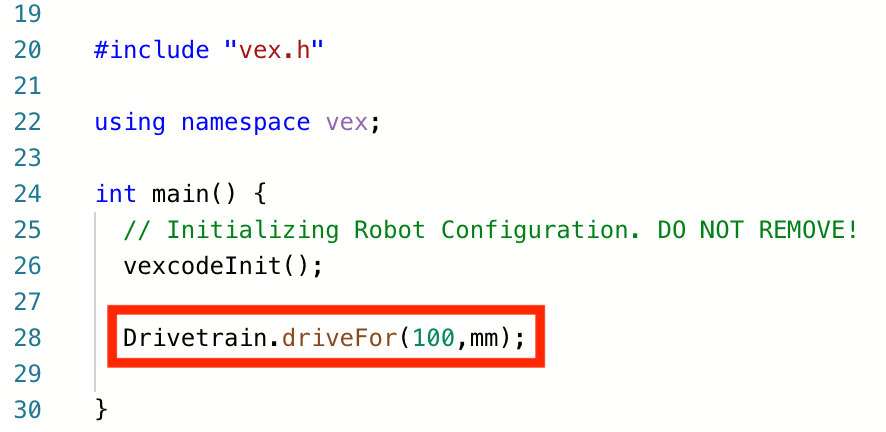
この調査で使用する VEXcode V5 命令:
-
Drivetrain.driveFor(1, インチ);
-
待機(1,秒);
-
-
命令の詳細情報を確認するには、「ヘルプ」を選択し、コマンドの横にある疑問符アイコンを選択して詳細情報を表示します。

-
必要なハードウェア、エンジニアリング ノートブック、VEXcode V5 がダウンロードされ、準備ができていることを確認してください。
![]() 教師のヒント
教師のヒント
学生が初めて VEXcode V5 を使用する場合は、学習中にいつでもチュートリアルを参照できます。

| 量 | 必要な材料 |
|---|---|
| 1 |
スピードボットロボット |
| 1 |
充電されたロボットバッテリー |
| 1 |
VEXコードV5 |
| 1 |
USBケーブル(コンピュータを使用する場合) |
| 1 |
エンジニアリングノートブック |
![]() 教師のヒント
教師のヒント
トラブルシューティングの各手順を学生にモデルとして示します。
ステップ1: 探索の準備
アクティビティを始める前に、これらのアイテムはすべて準備されていますか? 次の各項目を確認してください。
-
モーターは正しい ポートに接続されていますか?
-
スマートケーブル すべてのモーターに完全に挿入されていますか?
-
バッテリーは充電されて ?
ステップ2: 新しいプロジェクトを開始する
プロジェクトを開始するには、次の手順を完了してください。
-
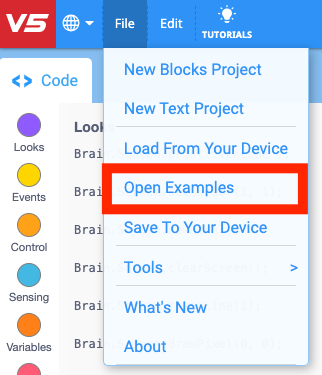
ファイル メニューを開き、例を開くを選択します。
-
Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを選択して開きます。 テンプレート プロジェクトには、Speedbot の モーター構成が含まれています。 テンプレートを使用しないと、ロボットはプロジェクトを正しく実行しません。

-
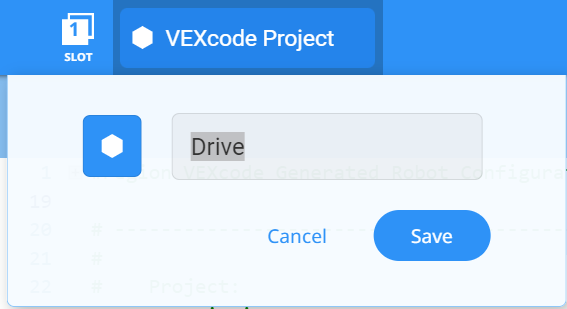
Speedbot を前進および後進させる作業を行うので、プロジェクトの名前を Driveにします。 プロジェクト名を選択し、「ドライブ」 と入力して、「保存」を選択します。
![]() 教師のヒント
教師のヒント
-
プロジェクト名では、単語の間または単語の後にスペースを入れることができます。

-
生徒にプロジェクト名に自分のイニシャルやグループ名を追加するよう依頼できます。 これは、学生にプロジェクトを提出するよう依頼する場合に、プロジェクトを区別するのに役立ちます。
-
これは生徒が最初に取り組むプログラミングのアクティビティなので、手順をモデル化して示し、生徒に同じアクションを実行するように依頼する必要があります。 次に、教師は生徒が手順を正しく実行しているかどうかを確認するために生徒を監視する必要があります。
-
生徒が「ファイル」メニューから「例を開く」を選択したことを確認します。
-
生徒が Speedbot (ドライブトレイン 2 モーター、ジャイロなし) テンプレート プロジェクトを選択していることを確認します。
-
「例」ページには選択できる選択肢がいくつかあることを生徒に指摘することができます。 他のロボットを組み立てて使用すると、さまざまなテンプレートを使用する機会が得られます。
-
プロジェクト名 Drive がツールバーの中央のウィンドウに表示されていることを確認します。

![]() 教師ツールボックス
-
プロジェクトの保存
教師ツールボックス
-
プロジェクトの保存
-
VEXcode V5 を初めて開いたとき、ウィンドウに VEXcode Project というラベルが付いていたことを指摘します。 VEXcode プロジェクトは、VEXcode V5 を初めて開いたときのデフォルトのプロジェクト名です。 プロジェクトの名前を Drive に変更して保存すると、表示が更新され、新しいプロジェクト名が表示されます。 ツールバーのこのウィンドウを使用すると、生徒が正しいプロジェクトを使用しているかどうかを簡単に確認できます。
-
生徒たちに、最初のプロジェクトを始める準備ができたことを伝えます。 いくつかの簡単な手順に従うだけで、スピードボットを前進させるプロジェクトを作成して実行できることを生徒に説明します。
-
作業中にプロジェクトを保存するように生徒に伝えます。 VEX ライブラリの C++ セクション では、VEXcode V5 での保存方法について説明します。
![]() 教師ツールボックス
-
立ち止まって話し合う
教師ツールボックス
-
立ち止まって話し合う
ここで一旦立ち止まり、生徒に、VEXcode V5 で新しいプロジェクトを開始する際に完了した手順を個別またはグループで確認してもらうとよいでしょう。 グループ内またはクラス全体で共有する前に、生徒に個別に振り返るように依頼します。
![]() 教師のヒント
教師のヒント
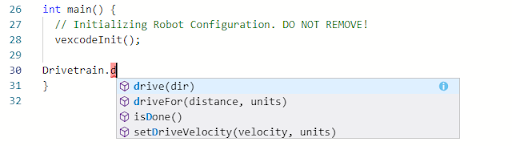
指示を入力し始めると、オートコンプリート機能に気付くかもしれません。 「上」キーと「下」キーを使用して希望の名前を選択し、キーボードの「Tab」キーまたは (Enter/Return) キーを押して選択します。 この機能の詳細については、 C++ の記事を参照してください。


![]() 教師ツールボックス
教師ツールボックス
-
ロボットブレインから USB ケーブルを取り外すように生徒に伝えます。 プロジェクトの実行中にロボットをコンピューターに接続すると、ロボットが接続ケーブルを引っ張る可能性があります。
![]() 教師ツールボックス
-
立ち止まって話し合う
教師ツールボックス
-
立ち止まって話し合う
このプロジェクトをダウンロードして Speedbot で実行すると何が起こるかを生徒に予想してもらいます。 学生たちに、エンジニアリングノートに予測を記録するように指示します。 時間が許せば、各グループに予想を共有してもらいます。
-
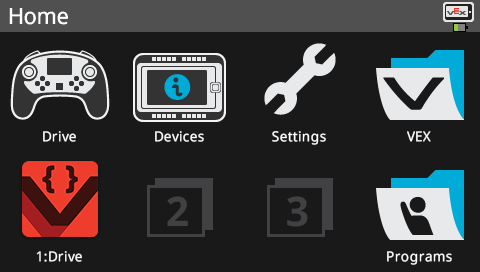
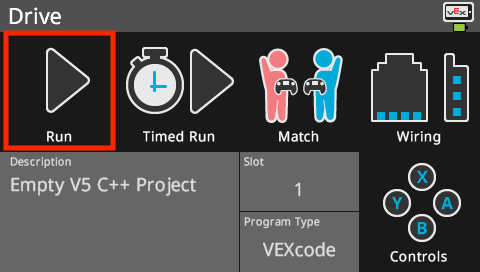
Robot Brain の画面を見て、プロジェクトが ダウンロードされた ことを確認します。 プロジェクト名 ドライブ がスロット 1 にリストされている必要があります。
![]() 教師用ツールボックス
-
モデルファースト
教師用ツールボックス
-
モデルファースト
-
生徒全員に一度に挑戦してもらう前に、クラスの前でプロジェクトの実行をモデル化します。 生徒を 1 つのエリアに集め、スピードボットを床に置く場合にスピードボットが動けるだけの十分なスペースを残します。
-
今度は生徒たちがプロジェクトを実行する番だと伝えます。 明確な経路があり、スピードボット同士が衝突しないことを確認してください。
-
プロジェクトが選択されていることを確認してから、Robot Brain の 押して、ロボット上でプロジェクトを実行します (C++) 最初のプロジェクトの作成おめでとうございます!
ステップ4: ドライブリバース
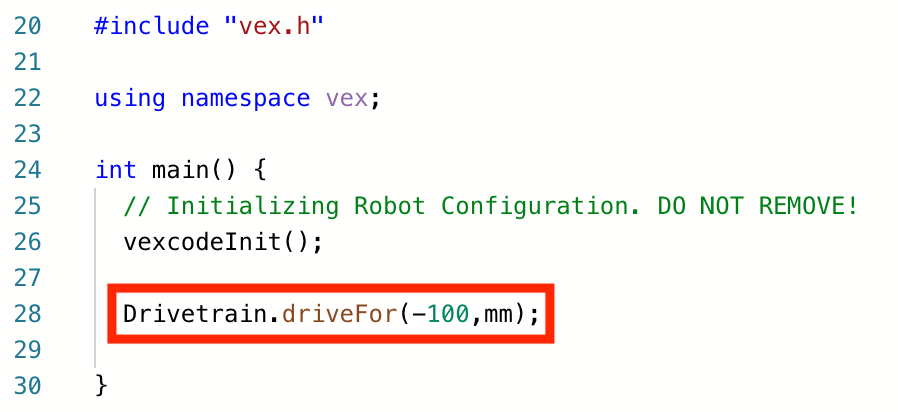
ロボットが前進するようにプログラムしたので、今度は後進するようにプログラムしてみましょう。
-
ドライブ命令のパラメータを変更して -100 を表示します。
-
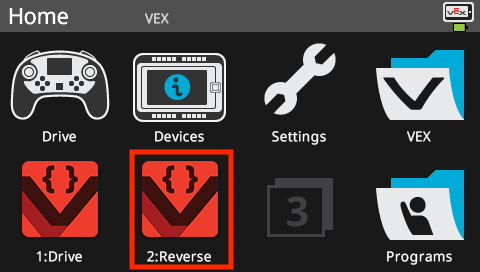
プロジェクト名を選択して、 Drive から Reverseに変更します。

-
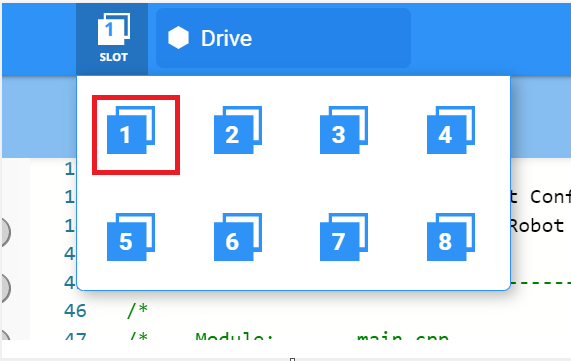
新しいスロットを選択するには、スロット アイコンを選択します。 スロット2を選択します。

-
プロジェクトをダウンロードします ( C++) 。

-
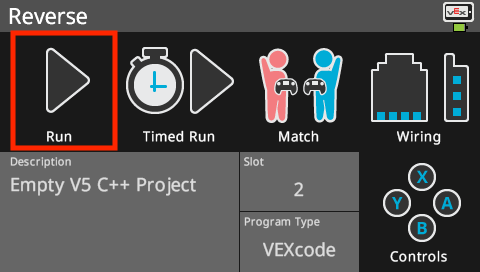
Robot Brain の画面を見て、プロジェクトが ダウンロードされていることを確認します ( C++) 。 プロジェクト名 Reverse がスロット 2 にリストされている必要があります。
-
プロジェクトが選択されていることを確認してから、Robot Brain の を押して、ロボット上でプロジェクトを実行します ( C++で)
![]() 教師ツールボックス
-
ステップ 4 の完了
教師ツールボックス
-
ステップ 4 の完了
-
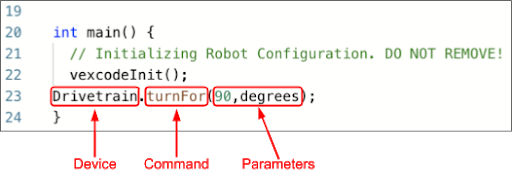
driveFor コマンドを forward から backwardに変更するには、最初のパラメータを -100 に変更するだけです。 これにより、ドライブトレイン内のモーターが反対方向に動きます。
-
mm の数は変更できますが、この例では、前の手順で設定した 100 mm のままにします。
-
プロジェクトを実行する前に、ロボット ブレインから USB ケーブルを取り外すように注意します。
-
作業中にプロジェクトを保存するように生徒に伝えます。 VEX ライブラリには、VEXcode V5 での保存方法を説明する C++ のセクションがあります。
ステップ5: 待ってから後進する
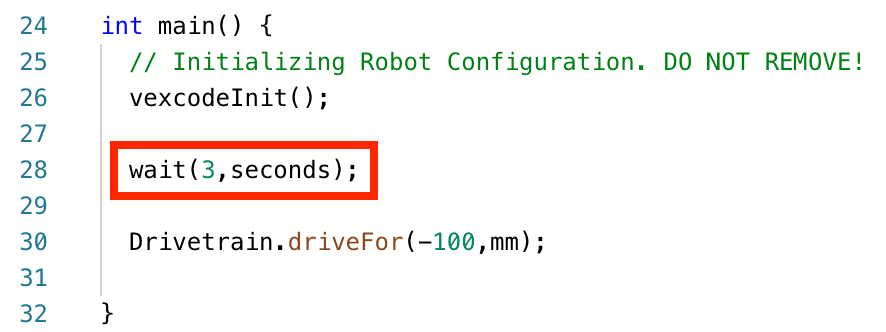
ロボットが前進してから後進するようにプログラムしたので、ロボットが後進する前に一定時間待機するように待機命令を追加できます。
-
図のように待機命令を追加します。 これは、ロボットに後進する前に 3 秒間待機するように指示します。
-
プロジェクト名を選択して、Reverse から WaitReverse に変更します。
-
新しいスロットを選択するには、スロット アイコンを選択します。 スロット3を選択します。

-
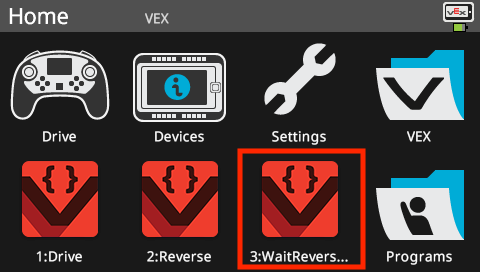
プロジェクトをダウンロードします ( C++) 。
-
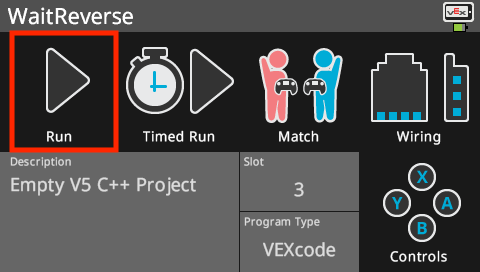
Robot Brain の画面を見て、プロジェクトが ダウンロードされていることを確認します ( C++) 。 プロジェクト名 WaitReverse がスロット 3 にリストされている必要があります。
-
プロジェクトが選択されていることを確認してから、 ボタンを押し、上でプロジェクトを実行します ( C++で)
![]() 教師用ツールボックス
-
ステップ 5 の完了
教師用ツールボックス
-
ステップ 5 の完了
-
待機コマンドを使用すると、プロジェクトは終了せず、ロボットの動きが一時停止されるだけです。
-
生徒がコンピュータを使用している場合は、プロジェクトを実行する前に Robot Brain から USB ケーブルを取り外すように生徒に伝えてください。
-
作業中にプロジェクトを保存するように学生に伝えます VEX ライブラリには、VEXcode V5 での保存方法を説明する C++ のセクションがあります。
ステップ 6: バスケットボール ドリル チャレンジを完了し 。
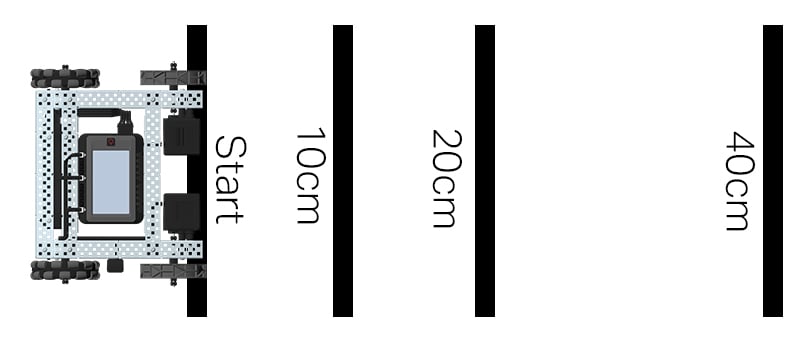
バスケットボールドリルチャレンジレイアウト
バスケットボール ドリル チャレンジでは、ロボットはさまざまな距離にある一連のラインを移動できなければなりません。 ロボットは開始位置から 10 cm の最初のラインまで前進し、1 秒待機してから、同じラインまで後進します。 次に、ロボットは 20 cm 前進して 2 番目のラインまで移動し、1 秒間待機してから、元の開始ラインまで後退するという動作を繰り返します。 ロボットは 40 cm の距離で 3 番目のラインまで前進し、1 秒間待機してから、最後にスタート ラインに戻ってチャレンジを終了します。
ロボットをプログラミングする前に、エンジニアリング ノートブックでロボットのパスと動作を計画します。
バスケットボール チャレンジを完了すると、前進と後進の動きと追加のロボット動作を組み合わせて、さらに高度なチャレンジを完了できるようになります。
プログラミングするときは、1 cm = 10 mm であることに留意してください。
![]() 教師ツールボックス
-
立ち止まって話し合う
教師ツールボックス
-
立ち止まって話し合う
クラス全体で話し合う前に、生徒にペアで解決策を共有するように指示します。 次のような質問をして議論を促進します。
-
このチャレンジをプログラミングする際に、何か困難に直面しましたか?
-
ロボットはプロジェクトに基づいて期待どおりに動作しましたか? なぜそうなのか、そうではないのか?
-
もう一度チャレンジできるとしたら、何かやり方を変えたいことはありますか?
![]() 教師ツールボックス
-
ソリューション
教師ツールボックス
-
ソリューション
