
Design, Develop, and Iterate on your Project - Blocks-based
Answer the following questions in your engineering notebook as you design your project.
-
What do you want the project have the robot do? Explain with details.
-
What steps will you follow to test the project? Explain with details.
-
How can your robot be programmed to complete the task with the most accuracy? Explain with details.
Follow the steps below as you create your project:
- Plan out the path you want to program your robot to follow using drawings and pseudocode (Google / .docx / .pdf).
- Use the pseudocode you created to develop your project.
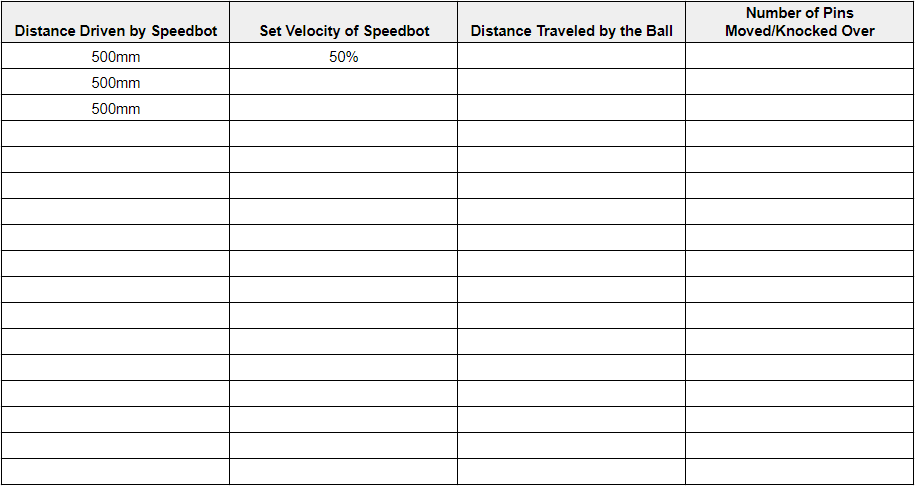
- Test your project often and iterate on it using what you learned from your testing. After each trial, record how far the robot drove, what the velocity was set to, about how far the ball traveled, and how many pins were moved. Here is an updated table for data collection and analysis.
- Use the pseudocode you created to develop your project in VEXcode V5.
- Test your project often and iterate on it using what you learned from your testing. After each trial, record how far the robot drove, what the velocity was set to, about how far the ball traveled, and how many pins were moved. Here is an updated table for data collection and analysis.
If you're having trouble getting started and you're working with Blocks, review one of the following Tutorials in VEXcode V5 :
-
Drivetrain Movements
-
Getting Started
-
Download and Run a Project
-
Moving and Removing Blocks
-
Naming and Saving Projects
-
Using Examples and Templates