
코드 준비하기
VEXcode IQ에는 코딩을 시작하는 데 도움이 되는 리소스가 내장되어 있습니다. 튜토리얼 비디오, 도움말 또는 예제 프로젝트에 액세스하여 프로젝트 저장, 다운로드 및 실행, 특정 블록 사용 방법 또는 프로젝트 시작에 대해 자세히 알아볼 수 있습니다.
튜토리얼 동영상
튜토리얼에 액세스하려면 왼쪽에 표시된 것처럼 VEXcode IQ 도구 모음에서 '튜토리얼' 아이콘을 선택합니다.
다음 튜토리얼 동영상은 이 단원을 시작하는 데 도움이 될 수 있습니다.
- 시작하기
- 장치 설정 - 드라이브 트레인
- 프로젝트 이름 지정 및 저장
- 프로젝트 다운로드 및 실행
기본 제공 도움말
도움말에 액세스하려면 먼저 왼쪽에 표시된 것처럼 VEXcode IQ에서 '도움말' 아이콘을 선택합니다.
그런 다음 블록이나 명령을 선택하여 자세히 알아보세요.
도움말 기능은 프로젝트에서 사용할 수 있는 방법을 포함하여 블록 또는 명령별 정보를 제공합니다.
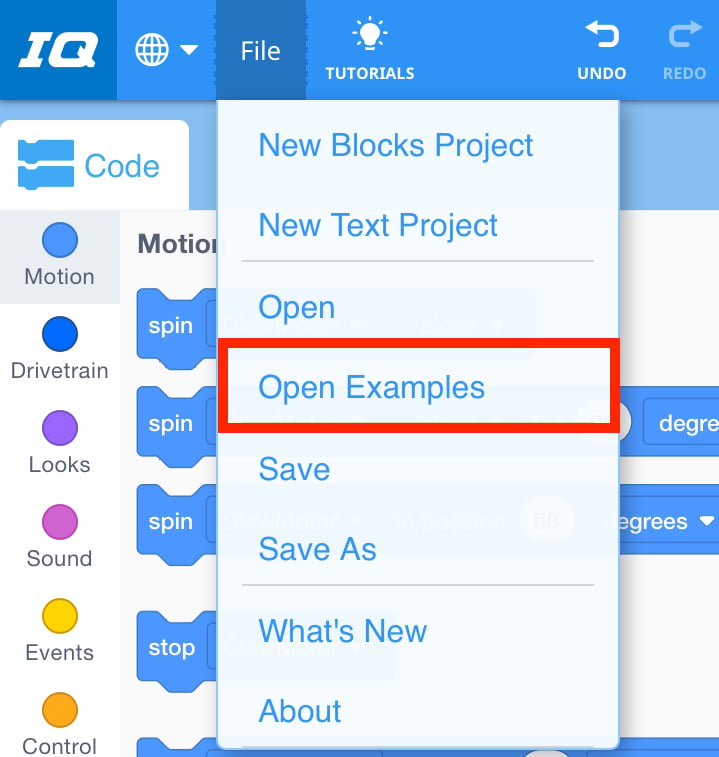
프로젝트 예시
예제 프로젝트에 액세스하려면 왼쪽에 표시된 것처럼 '파일' 을 선택한 다음 '예제 열기' 를 선택합니다.
코딩을 시작하는 데 도움이 되는 시작 프로젝트의 경우 예제 프로젝트를 사용할 수 있습니다. 예시 프로젝트에는 다양한 VEX IQ 빌드를 위한 템플릿과 다양한 기능 및 기능을 위한 샘플 프로젝트가 포함됩니다.
이 단원에서는 다음 템플릿 예제 프로젝트를 사용할 수 있습니다.
- 심플 클로봇 (드라이브트레인 2모터)
다음 단계는 무엇인가요?
아래 애니메이션을 시청하여 Simple Clawbot이 자율적으로 세 개의 큐브를 이동하는 것을 확인하고 다음 수업에서 수행할 작업에 대해 자세히 알아보세요.
이 강의에서는 Simple ClawBot을 구축하고 배터리를 충전했습니다.
다음 레슨에서 학습할 내용은 다음과 같습니다.
[Spin for] 블록을 사용하여 발톱을 열고 닫아 보물 큐브를 집어 내는 방법을 알아보세요.
Drivetrain 블록을 사용하여 Simple Clawbot을 구동하고 돌립니다.
큐브 수집가 챌린지에서 경쟁하세요!
왼쪽 애니메이션에서 Simple Clawbot은 첫 번째 큐브 반대편 왼쪽 하단 모서리에서 시작합니다. 이 로봇은 필드의 각 큐브를 먼 벽에서 가까운 벽으로 잡고 전달하는데, 이 작업은 약 35초 만에 완료됩니다.
수업으로 < 돌아가기 를 선택하여 수업 개요로 돌아갑니다.
다음 레슨을 > 선택하여 레슨 2를 계속하고, 발톱을 사용하여 보물 큐브를 집어 놓는 방법을 배웁니다.