
덤핑 호퍼 누산기
 덤핑 호퍼 어큐뮬레이터에 물건을 수집하는
덤핑 호퍼 어큐뮬레이터에 물건을 수집하는 덤핑 호퍼 어큐뮬레이터
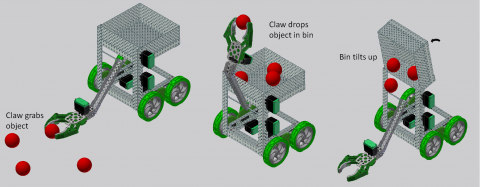
호퍼는 물체가 배치되는 넓은 저장 공간입니다. 덤핑 호퍼의 경우, 물체를 내놓는 방식과 모으는 방식이 다릅니다.
이 로봇의 발톱 팔은 물체를 집어 올려 호퍼에 쏟은 다음, 호퍼가 덤프트럭처럼 뒤로 기울어져 골대에 물체를 넣습니다.
STEM 연구소
Design By Request
학생 >
덤핑 호퍼 어큐뮬레이터에 물건을 수집하는 호퍼는 물체가 배치되는 넓은 저장 공간입니다. 덤핑 호퍼의 경우, 물체를 내놓는 방식과 모으는 방식이 다릅니다.
이 로봇의 발톱 팔은 물체를 집어 올려 호퍼에 쏟은 다음, 호퍼가 덤프트럭처럼 뒤로 기울어져 골대에 물체를 넣습니다.