
Dumping Hopper Accumulators
Bộ tích lũy phễu đổ
Phễu là một khu vực lưu trữ lớn trong đó các đồ vật được đặt. Với phễu đổ, cách các vật thể được thả ra khác với cách chúng được thu thập.
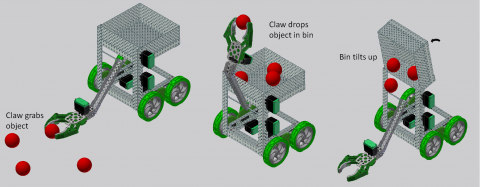
Trên robot này, một cánh tay dạng càng sẽ nhặt các vật thể và đổ chúng vào phễu, sau đó phễu sẽ nghiêng về phía sau giống như một xe ben để ghi các vật thể vào khung thành.